一种清扫机器人的齿轮箱及齿轮的制作方法
本技术涉及清扫机器人的领域,尤其是涉及一种清扫机器人的齿轮箱及齿轮。
背景技术:
1、随着社会经济不断地发展进步,越来越多的智能化家居产品进入至人们的日常生活中,例如清扫机器人,清扫机器人又称为自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作,清扫机器人一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。
2、清扫机器人为了应对不同清扫环境的行驶通过性,一般会对驱动电机的输出扭矩进行提高,提高驱动电机的输出扭矩一般会使用变速箱增大驱动电机的输出扭矩,现有的变速箱一般采用多组不同传动比的齿轮组对驱动电机输出的动力进行减速增扭。
3、针对上述中的相关技术,采用多组传动比不同的齿轮组组成的变速箱进行变速,在有限的体积下不易获得较大的扭矩,不易满足复杂地形的通过性。
技术实现思路
1、为了在有限的体积下获得较大的扭矩,满足复杂地形的通过性,本技术提供一种清扫机器人的齿轮箱及齿轮。
2、本技术提供的一种清扫机器人的齿轮箱及齿轮采用如下的技术方案:
3、一种清扫机器人的齿轮箱,包括清扫主体、两个转动轮以及两个变速机构,两所述转动轮均设置于清扫主体,两所述变速机构分别设置于两转动轮,所述变速机构均包括变速箱、第一齿轮组以及驱动电机,所述驱动电机固定设置于变速箱,所述第一齿轮组包括第一齿圈、第一太阳轮以及第一行星轮,所述第一太阳轮同轴固定设置于驱动电机的输出轴,所述第一行星轮转动设置于变速箱,所述第一行星轮和第一太阳轮啮合,所述第一齿圈转动设置于变速箱,所述第一齿圈和第一行星轮啮合,所述第一齿圈驱动转动轮转动。
4、通过采用上述技术方案,清扫机器人运动时,驱动电机驱动,第一太阳轮转动,第一太阳轮转动带动第一行星轮转动,第一行星轮转动带动第一齿圈转动,第一齿圈转动,第一齿圈转动驱动转动轮转动,从而转动轮转动更大,改善了采用多组传动比不同的齿轮组组成的变速箱进行变速,在有限的体积下不易获得较大的扭矩,不易满足复杂地形的通过性。
5、可选的,所述变速机构还包括第二齿轮组,所述第二齿轮组包括第二齿圈、第二行星轮以及第二太阳轮,所述第二齿圈转动设置于变速箱,所述第一齿圈驱动第二太阳轮转动,所述第二行星轮转动设置于变速箱,所述第二行星轮和第二太阳轮啮合,所述第二齿圈转动设置于变速箱,所述第二行星轮和第二齿圈啮合,所述第二齿圈带动转动轮转动。
6、通过采用上述技术方案,当第一齿圈转动时,第二太阳轮转动,第二太阳轮转动带动第二行星轮转动,第二行星轮转动带动第二齿圈转动,第二齿圈转动驱动转动轮转动,从而使得转动轮的转动扭矩进一步增大,使得清扫机器人复杂地形的通过性进一步增加,使得实用性更佳。
7、可选的,所述变速机构还包括连接齿轮组,所述连接齿轮组包括第一连接齿轮和第二连接齿轮,所述第一连接齿轮同轴固定设置于第一齿圈,所述第二连接齿轮同轴固定设置于第二太阳轮,所述第一连接齿轮和第二连接齿轮啮合。
8、通过采用上述技术方案,第一齿圈转动时,第一连接齿轮转动,第一连接齿轮转动带动第二连接齿轮转动,第二连接齿轮转动带动第二太阳轮转动,从而使得转动轮的转动扭矩进一步增大,使得清扫机器人复杂地形的通过性进一步增加,使得实用性更佳。
9、可选的,所述第一连接齿轮和第二连接齿轮均为斜齿轮。
10、通过采用上述技术方案,第一连接齿轮和第二连接齿轮均为斜齿轮的设置,使得第一连接齿轮和第二连接齿轮之间的动力传输损耗更小,使得输送至转动轮的动力更大,使得使用性更佳。
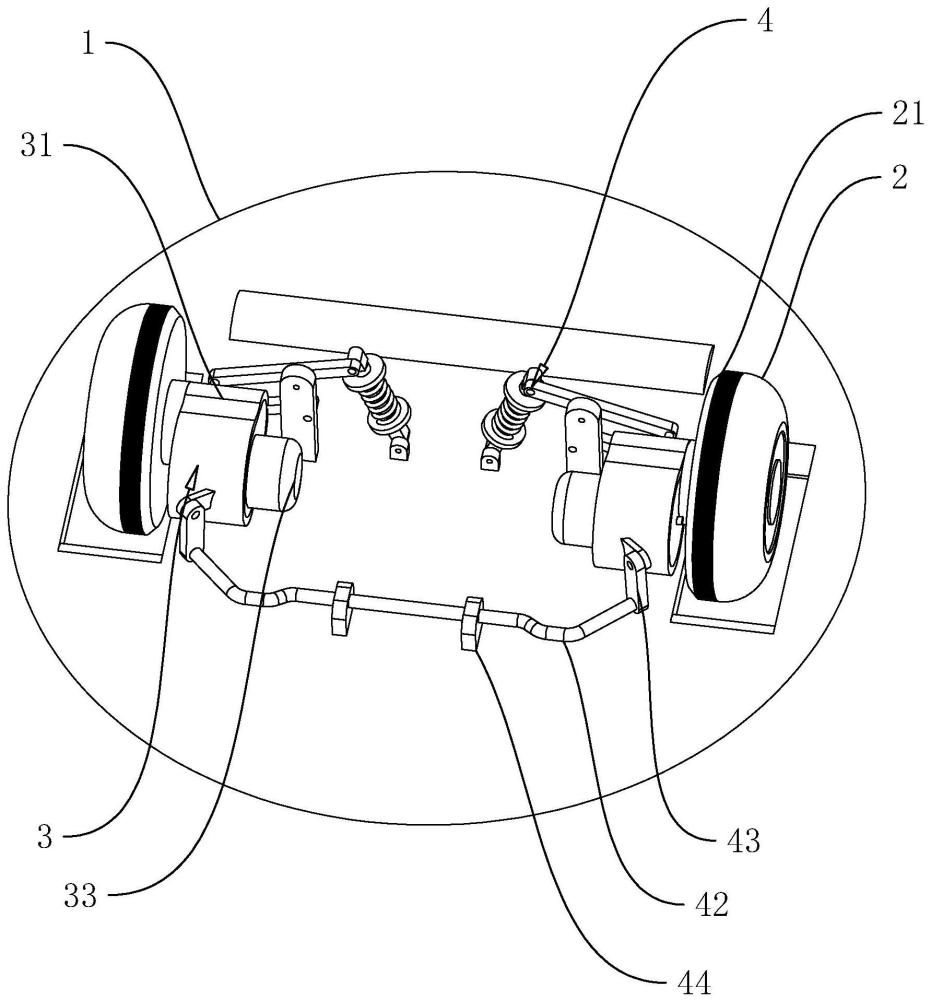
11、可选的,还包括减震机构,所述减震机构包括两个减震组件,所述减震组件包括第一减震杆、转动轴以及减震弹簧,所述第一减震杆转动连接于变速箱,所述转动轴固定设置于清扫主体,所述第一减震杆开设有转动孔,所述转动轴穿设于转动孔并与转动孔转动配合,所述减震弹簧位于第一减震杆和清扫主体之间,所述减震弹簧一端设置于第一减震杆,所述减震弹簧另一端设置于清扫主体。
12、通过采用上述技术方案,当转动轮出现震动时,第一减震杆绕转动轴轴线朝靠近减震弹簧方向转动,从而对减震弹簧进行压缩,从而将转动轮的振动进行缓冲,从而进一步增加清扫机器人在复杂地面的通过性,使得使用性更佳。
13、可选的,所述减震组件还包括减震器,所述减震器一端与第一减震杆转动连接,所述减震器另一端与清扫主体转动连接,所述减震器穿设于减震弹簧,所述减震弹簧两端均与减震器抵接配合。
14、通过采用上述技术方案,当减震弹簧压缩时,减震器跟随减震弹簧一同压缩,当减震弹簧复位时,减震器阻挡减震弹簧复位,从而使得减震弹簧复位缓慢,从而使得减震机构的减震性能更佳,从而进一步增加了清扫机器人的复杂路面通过性以及平顺性。
15、可选的,所述减震组件还包括第二减震杆,所述第二减震杆一端转动设置于变速箱,所述第二减震杆另一端转动设置于清扫主体,所述第二减震杆和第一减震杆平行设置。
16、通过采用上述技术方案,第一减震杆转动时,第二减震杆同时转动,从而使得转动轮保持竖直不易发生偏移,使得使用性更佳。
17、可选的,所述减震机构还包括防倾杆和两稳定杆,所述防倾杆具备韧性,所述防倾杆转动设置于清扫主体,两所述稳定杆具备弹性,两所述稳定杆一端分别与防倾杆两端转动连接,两所述稳定杆另一端分别转动设置于两转动轮。
18、通过采用上述技术方案,当两转动轮振动幅度相同时,两稳定杆带动防倾杆转动,当两转动轮振动幅度不同时,防倾杆通过自身韧性对两侧转动轮施加一个向下压的力,从而使得两转动轮快速回正至相同位置,从而使得清扫机器人不易侧倾,从而使得清扫机器人在复杂地形的通过性更佳,使得使用性更佳。
19、可选的,所述减震机构还包括橡胶衬套,所述橡胶衬套固定设置于清扫主体,所述橡胶衬套套设于防倾杆外周面。
20、通过采用上述技术方案,橡胶衬套的设置,在将防倾杆限位于清扫主体的同时,通过自身的弹性,抵抗防倾杆工作时的产生的轻微位移,使得使用性更佳。
21、可选的,所述第一太阳轮所选用的材质为铜基粉末冶金材料,所述第二太阳轮和第一连接齿轮所选用的材质均为聚四氟乙烯,所述第一齿圈、第一行星轮、第二齿圈、第二行星轮以及第二连接齿轮所选用的材质均为聚甲醛。
22、通过采用上述技术方案,第一太阳轮采用铜基粉末冶金材料使得,第一太阳轮强度更加耐磨性更佳,第二太阳轮和第一连接齿轮聚四氟乙烯材料的选用,使得第二太阳轮和第一连接齿轮的相对其它材质较软,从而使得降低变速机构使用时的噪音,第一齿圈、第一行星轮、第二齿圈、第二行星轮以及第二连接齿轮聚甲醛使得加工更加简单方便以及精度更佳。
23、综上所述,本技术包括以下至少一种有益技术效果:
24、1.清扫机器人运动时,驱动电机驱动,第一太阳轮转动,第一太阳轮转动带动第一行星轮转动,第一行星轮转动带动第一齿圈转动,第一齿圈转动,第一齿圈转动驱动转动轮转动,从而转动轮转动更大,改善了采用多组传动比不同的齿轮组组成的变速箱进行变速,在有限的体积下不易获得较大的扭矩,不易满足复杂地形的通过性。
25、2.当第一齿圈转动时,第二太阳轮转动,第二太阳轮转动带动第二行星轮转动,第二行星轮转动带动第二齿圈转动,第二齿圈转动驱动转动轮转动,从而使得转动轮的转动扭矩进一步增大,使得清扫机器人复杂地形的通过性进一步增加,使得实用性更佳。
26、3.第一太阳轮采用铜基粉末冶金材料使得,第一太阳轮强度更加耐磨性更佳,第二太阳轮和第一连接齿轮聚四氟乙烯材料的选用,使得第二太阳轮和第一连接齿轮的相对其它材质较软,从而使得降低变速机构使用时的噪音,第一齿圈、第一行星轮、第二齿圈、第二行星轮以及第二连接齿轮聚甲醛使得加工更加简单方便以及精度更佳。
- 还没有人留言评论。精彩留言会获得点赞!