一种自适应管径的轮式管道内检测机器人
本发明涉及管道检测相关,尤其是一种自适应管径的轮式管道内检测机器人。
背景技术:
1、在油气管网中,随着油气管道的使用时间变长,地底环境潮湿和地震等自然灾害会造成油气管道的腐蚀、裂纹和断裂,经常会出现油气泄漏污染环境和安全的问题。为了防止发生油气泄漏,造成安全事故,保障油气管线的安全运营,定期对管线腐蚀状况进行巡检并及时进行维修维护成为管道完整性管理的必要措施。管内检测是油气管道检测中较为常见的一种方式,其中,轮式检测装置由于其方便、成本低等优点成为管道检测中较为常用的装置。
2、管内检测装置大多采用无损检测的方式,其中导波超声检测是较为常见的无损检测的方式,主要利用低频扭曲波或者纵波对管路进行长距离检测,导波超声的优点是能传播20-30米长距离而衰减很少,因此可在一个位置固定脉冲回波阵列就可做大范围的检测,十分钟内可检测20多米的管道,现有导波超声检测的装置主要应用在管外检测,但是在管内检测的应用相对较少。
3、目前大多数自适应管径的轮式管道内检测机器人在适应管道直径变化的过程中会出现由于检测模块密度变化导致检测精度变化的问题,适应性不高。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种可保持检测探头的相对密度不变,从而可确保检测精度的自适应管径的轮式管道内检测机器人。
2、本发明解决其技术问题是通过以下技术方案实现的:
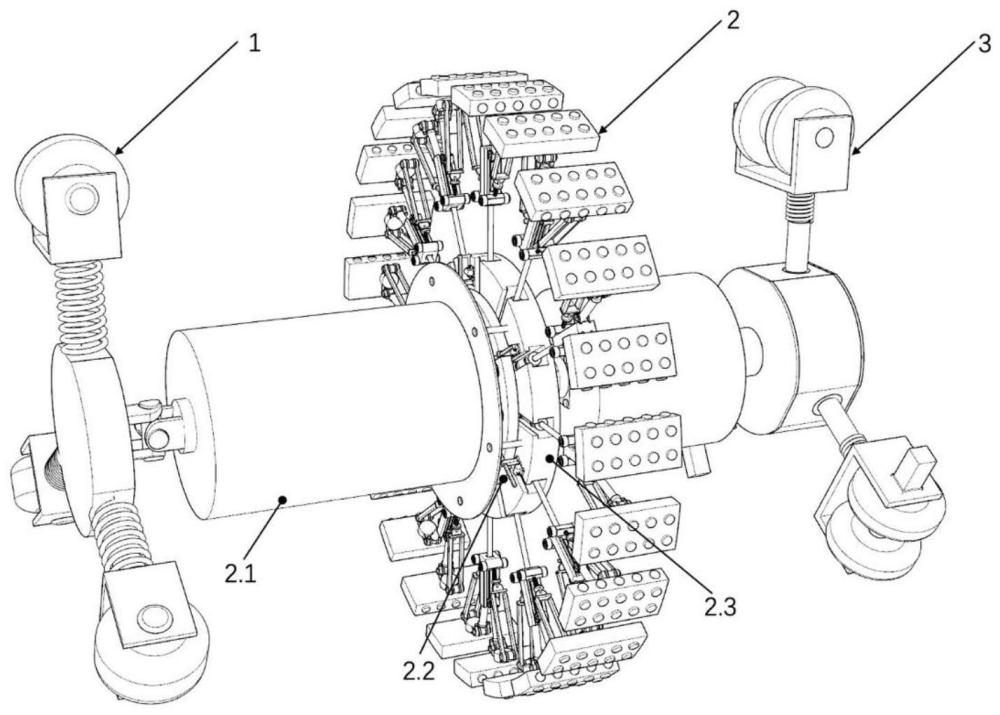
3、一种自适应管径的轮式管道内检测机器人,其特征在于:包括支撑行走机构、主体检测机构和驱动行走机构;所述支撑行走机构、主体检测机构和驱动行走机构通过万向节前后依次连接;
4、所述支撑行走机构通过三个前行走轮与管道内壁接触,所述三个前行走轮为从动轮,且三个前行走轮沿圆周方向均布设置且沿管道径向支撑位置可自行调节,在支撑行走机构的前侧安装有用于检测管径变化的距离传感器;所述驱动行走机构通过三个后行走轮与管道内壁接触,所述三个后行走轮为动力轮,且三个后行走轮沿圆周方向均布设置且沿管道径向支撑位置可自行调节;
5、所述主体检测机构包括固定圆盘、数组检测模块组、支撑和变径驱动机构;数组检测模块组沿圆周方向均布设置于固定圆盘的外围,每组检测模块组由沿圆周方向设置的左检测模块和右检测模块构成,每个检测模块包括探头座及探头,探头均布固定安装于探头座外表面及外侧面上;所述支撑及变径驱动机构包括伺服电机、电机安装座、旋转盘、数组支撑机构、数组变径驱动机构及数组检测模块折叠驱动机构;
6、所述旋转盘设置于固定圆盘的前部,两者通过轴承同心可相对转动式连接;伺服电机固定于电机安装座内,并与旋转盘前端驱动连接;数组支撑机构沿圆周方向均布设置,并与固定圆盘沿径向形成滑动配合;数组检测模块组以左右两检测模块可向内折叠的方式一一支撑于数组支撑机构上;数组变径驱动机构与数组支撑机构一一配合,并通过旋转盘的旋转实现数组支撑机构的同步径向位移调节;在固定圆盘的前侧面每间隔一组变径驱动机构安装有一组检测模块折叠驱动机构,检测模块折叠驱动机构用于驱动对应的检测模块组的左右两检测模块实现折叠;在主体检测机构直径变小的过程中,以其中一组检测模块折叠驱动机构对应的检测模块为起点,沿顺时针或逆时针方向,多组检测模块组中的左右两检测模块逐渐实现向内折叠收起。
7、而且,所述固定圆盘的前侧中心设置有轴承安装孔,并在固定盘的前侧沿圆周方向均布设置有多个径向导向孔。
8、而且,每组支撑机构包括液压缸、支撑块、左外支撑长臂、左内支撑短臂、右外支撑长臂、右内支撑短臂及铰接滑座;多组支撑机构的液压缸一一沿固定圆盘径向可移动式安装于固定圆盘上的径向导向孔内;液压缸的缸体外端固定安装缸套,缸套的外端与支撑块的内端固定连接;所述左支撑长臂和右支撑长臂的下端分别与一拉簧的上端连接,两拉簧的下端分别与支撑块的左、右两侧靠近下端的位置;所述左支撑长臂和右支撑长臂的上端分别与对应的左检测模块的下端靠近外侧的位置和右检测模块的下端靠近外侧的位置铰连接;所述左内支撑短臂的上端和右内支撑短臂的上端分别与对应的左检测模块的下端靠近内侧的位置及右检测模块的下端靠近内侧的位置铰连接;所述左内支撑短臂的下端和右内支撑短臂的下端分别与铰接滑座的左端和右端铰连接,所述铰接滑座以沿固定圆盘的径向可滑动的方式嵌装于设置在支撑块上的径向滑槽内;在支撑块的内端部设置有与径向滑槽连通的穿杆孔;所述液压缸的缸杆通过穿杆孔与铰接滑块固定连接。
9、而且,在旋转盘上沿圆周方向均布设置有多个沿同一旋向延伸设置的圆弧状的长孔,长孔的孔壁上设置有啮合齿。
10、而且,每组变径驱动机构包括齿轮、齿轮轴;齿轮可转动式安装于齿轮轴上,齿轮轴的后端与对应液压缸的缸体下端垂直固定连接;多组变径驱动机构的齿轮一一插装于旋转盘上的多个圆弧状的长孔内,并与对应长孔内的啮合齿形成齿啮合。
11、而且,每组检测模块折叠驱动机构包括齿条、齿条导向座、油箱和油箱推杆;所述齿条导向座固定于固定圆盘的前侧,在齿条导向座上设置有齿条导向孔,所述齿条以平行于固定圆盘的径向的方向以间隙配合的方式穿装于对应的齿条导向孔内,且齿条的齿部位于靠近对应齿轮的一侧;在主体检测机构变径的过程中,齿条的齿部与对应的齿轮的前齿部形成齿啮合;在固定圆盘的前侧面上位于每个齿条导向座的安装位置的外部分别固定安装一油箱,油箱内腔中设置有隔板,隔板与从油箱上端伸出的油箱推杆固定连接,油箱推杆的上端与对应齿条的上端通过横连杆固定连接;在油箱的油口与液压杆的油口之间连接有油管;在油箱推杆随齿条下行时,油箱内的储油容积增大,形成负压,使液压缸内的液压油通过油管进入到油箱内,液压缸的缸杆缩回,使对应连接的铰接滑座带动左内支撑短臂和右支撑短臂下行,使对应的左、右两检测模块内折收起,实现通过探头座外表面上的探头检测转变为通过外侧面上的探头进行检测。
12、而且,所述支撑行走机构包括盘形前支撑座,在盘形前支撑座上沿圆周方向均布固定有三个径向导向孔,在每个径向导向孔内可移动式插装有一径向支撑杆,在三个径向支撑杆的外端均固定安装u形前轮座,在三个u形前轮座上通过轮轴各安装有一前行走轮;在每个径向支撑杆上各套设一压簧,压簧的两端分别与对应的u形前轮座的底面及盘形前支撑座的外侧面压紧接触。
13、而且,所述驱动行走机构主要包括盘形后支撑座、三组液压杆、三个u形后轮座、三组后行走轮;所述三组液压杆沿盘形后支撑座的径向方向与盘形支撑座的外侧面固定连接,且三组液压杆沿圆周方向均布设置;三个u形后轮座的底部分别与三个液压杆的外杆端垂直固定连接,三组后行走轮分别通过各自后轮轴可转动式支撑于三个u形后轮座上,且在三个u形后轮座的外侧分别安装一伺服电机,三个伺服电机与对应的后轮轴驱动连接。
14、而且,在三个液压杆的杆体上分别套装一缓冲压簧,缓冲压簧的两端分别与液压杆的缸筒端及u形后轮座的底面压紧接触。
15、本发明的优点和有益效果为:
16、1、本发明通过支撑行走机构、主体检测机构和驱动行走机构的组合,实现机器人在管道内的行走及检测;支撑行走机构、主体检测机构和驱动行走机构均采用可实现径向调节的机构,可满足机器人对多种不同管径的管道的检测要求。
17、2、本发明通过数组检测模块折叠驱动机构实现了在管道变径(指直径变小)的过程中,控制一部分检测模块组中的左、右检测模块实现内折叠,使整圈的探头数量与管道的内壁的面积形成匹配,使检测探头的相对密度保持不变,确保了检测精度保持不变。
- 还没有人留言评论。精彩留言会获得点赞!