一种磁悬浮轴承位移控制器的制作方法
本技术涉及磁悬浮轴承,具体涉及一种磁悬浮轴承位移控制器。
背景技术:
1、磁悬浮轴承位移控制器主要包含位置外环和电流内环,转子在悬浮过程中由于受到干扰会产生振动信号,通过安装在转子上的一对差动电涡流位移传感器检测转子位移变化并转化成电压信号,与参考电压信号比较,将偏差量送入位置环控制器,位置环控制器的输出信号作为电流环的给定信号,与实际采样的电流信号进行比较,将偏差量送入电流环控制器中,控制器输出控制电压信号经开关功率放大器转化为控制电流变化,改变磁轴承线圈产生的电磁力的大小,使转子恢复到平衡位置。
2、转子位移信号一般使用a/dc模块进行采样,a/dc数字控制采样时间的长短决定了采样电压的精度,当设置的采样窗口时间过长时,信噪比增强,有效位数增多,相应的转换时间变长,由此造成的a/d转换延时更长;反之,当设置的采样窗口时间过短时,导致采样电容的充电时间不够,采到的电压低于实际电压值。
3、由于比例-积分-微分(pid)控制器具有结构简单、参数调节相对简单且具有一定的鲁棒性等优点,因此目前大多数的轴承位置环控制器还是以比例-积分-微分(pid)作为控制策略。比例-积分-微分(pid)控制是以经典控制理论为基础,经过工程应用形成的一种实用控制方法,其基本原理是依据误差反馈策略对系统进行控制。其中比例(p)部分的功能是抑制快速的负载变化,对位置精度要求并不高,因此电压采样芯片的短延时对比例部分有利;积分(i)部分的功能是确保位移控制器稳态精度,对位移要求精度高,因此位移采样芯片的多采样窗口提升位置精度对积分部分有利;微分(d)部分的功能是改善系统的动态性能,对位置精度要求不高,电压采样的短延时对微分作用比较有利。
4、在现有的磁轴承位移控制器中比例-积分-微分(pid)控制器中采用的是相同的反馈位移信号。
5、如图1所示的a/d采样示意图,当采样窗口设置为128时,采样延时为采样窗口设置为64的2倍。目前可用的a/d转换器可提供高达20mhz的调制频率,以20mhz的转换速率为例,不同采样窗口下的转换延时和采样精度如下:
6、 窗口设置 转换延时 采样精度 64 3.2us 12位 128 6.4us 13位
7、由表可知,当采样窗口设置为64时,采样延时较小,采样精度为12位;当采样窗口设置为128时,采样精度提升至13位,但相应的转换时间变长。
8、如图2所示的现有位移pid控制器框图,位移反馈信号通过a/d转换器后与期望的位移信号进行比较产生偏差信号err(t),该偏差信号同时作用于比例项(p)、积分项(i)和微分项(d),则系统输出u(t)可表示为:
9、
10、比例部分的输出up=kperr(t),其作用是一直快速负载变化,对延迟敏感,对反馈精度不敏感。
11、积分部分的输出ui=ki∫err(t)dt,积分项会将前面若干次的误差进行累计,适合在较低动态性能和较高精度下工作,对延迟较不敏感。
12、微分部分的输出微分项的输出取决于误差随时间的变化率,与偏差大小无关,偏差变化的速度越大,则微分作用的输出变化越大,所以微分作用对延迟较为敏感。
13、在传统的比例-积分-微分(pid)控制中,比例、积分、微分采用相同的反馈位移信号,该反馈位移信号的动态特性无法同时适合比例路径、积分路径和微分路径,这样位移控制器无法满足在具备高精度的同时还具有良好的动态特性,这也成了单反馈位移采样方式的弊病。
技术实现思路
1、本实用新型要解决的技术问题是如何实现磁悬浮轴承位移控制器在具备高精度的同时还具有良好的动态特性。
2、为了解决上述技术问题,本实用新型提供了一种磁悬浮轴承位移控制器,包括:
3、至少两个a/d转换器,位置反馈信号分别经所述a/d转换器对应得到多个精度反馈位移信号;
4、分别与所述a/d转换器输出端连接的信号比较器,多个所述精度反馈位移信号与期望值分别经所述信号比较器比较对应得到多个偏差信号;
5、分别与多个所述信号比较器输出端连接的pid控制器,多个所述偏差信号分别经所述pid控制器作用对应得到多个处理信号,多个所述处理信号叠加,得到所述位移控制器的输出信号。
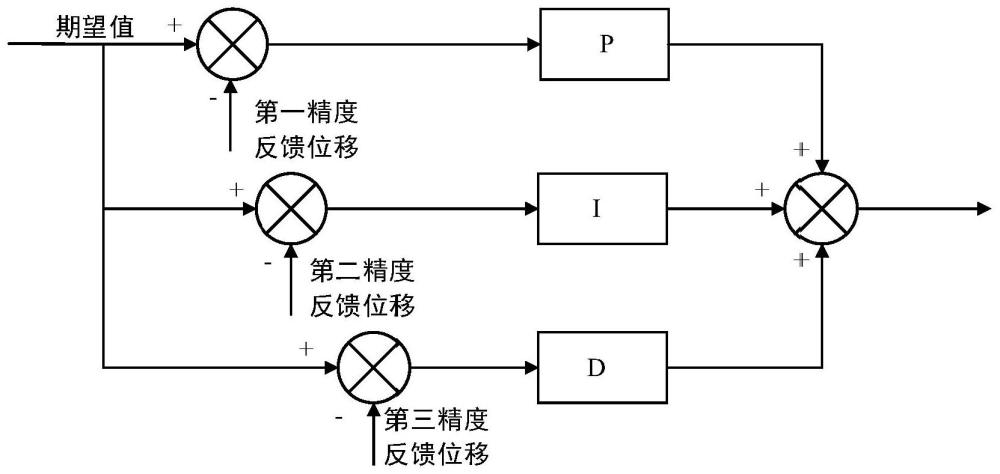
6、进一步的,所述a/d转换器包括第一a/d转换器、第二a/d转换器和第三a/d转换器;所述pid控制器包括比例器、积分器和微分器,其中:
7、所述位置反馈信号经所述第一a/d转换器得到第一精度反馈位移信号,所述第一精度反馈位移信号与所述期望值经所述信号比较器比较得到第一偏差信号,所述第一偏差信号按照所述比例器对反馈位移精度的要求转换为比例处理信号;
8、所述位置反馈信号经所述第二a/d转换器得到第二精度反馈位移信号,所述第二精度反馈位移信号与所述期望值经所述信号比较器比较得到第二偏差信号,所述第二偏差信号按照所述积分器对反馈位移精度的要求转换为积分处理信号;
9、所述位置反馈信号经所述第三a/d转换器得到第三精度反馈位移信号,所述第三精度反馈位移信号与所述期望值经所述信号比较器比较得到第三偏差信号,所述第三偏差信号按照所述积微分器对反馈位移精度的要求转换为微分处理信号。
10、进一步的,还包括分别与所述比例器、所述积分器和所述微分器相连接的加法器,所述加法器用于将所述比例处理信号、所述积分处理信号和所述微分处理信号叠加,得到所述位移控制器的输出信号。
11、优选的,所述a/d转换器包括第一a/d转换器和第二a/d转换器,所述pid控制器包括比例器、积分器和微分器,其中:
12、所述位置反馈信号经所述第一a/d转换器得到第一精度反馈位移信号,所述第一精度反馈位移信号与所述期望值经所述信号比较器比较得到第一偏差信号,所述第一偏差信号按照所述比例器和所述微分器对反馈位移精度的要求转换为比例微分处理信号;
13、所述位置反馈信号经所述第二a/d转换器得到第二精度反馈位移信号,所述第二精度反馈位移信号与所述期望值经所述信号比较器比较得到第二偏差信号,所述第二偏差信号按照所述积分器对反馈位移精度的要求转换为积分处理信号;
14、进一步的,还包括分别与所述比例微分器和所述积分器相连接的加法器,所述加法器用于将所述比例微分处理信号和所述积分处理信号叠加,得到所述位移控制器的输出信号。
15、与现有技术相比,本实用新型具有如下有益效果:
16、本实用新型设置三路位移采样通道,将位移控制器的比例路径、积分路径和微分路径进行分离,并采用具有不同动态特性的位置反馈信号工作,满足了比例项、积分项和微分项对不同反馈位移精度的要求,从而使电流控制器在满足稳态精度的同时具有良好的动态特性。
- 还没有人留言评论。精彩留言会获得点赞!