一种推进器吸附的海底超声无损检测爬壁机器车
本发明属于水下机器人领域,具体涉及一种推进器吸附的海底超声无损检测爬壁机器车。
背景技术:
1、管道运输是五大物料运输方式中的重要手段之一,在国民经济、国防建设以及市政民生等众多领域具有广泛应用。由于管道铺设具有上天、入地和潜水等特点,工作有高低温和不同压力等状态之分,因而造成:一方面,管道往往工作于恶劣、多变和复杂的环境中,加之其运输对象可能是有毒或易燃、易爆物料,并且其中局部的损伤会带来全局的瘫痪,甚至造成灾难性的恶果,因而管道安全问题尤为突出;另一方面,仅凭人工手段已难以对管道安全状况实施有效监控及对出现的问题进行有效处置,而且通过人工巡检的方式效率低、费用高、安全隐患大。
2、此外,现有的用于管道检测的水下机器人机构冗余、体积大、质量大、控制困难、稳定性差、可靠性差、检测效率低。现有的部分水下机器人检测基于目视检测,目视检测难以检测微小缺陷,且只能提供管道表面的信息,并不能检测内部缺陷,成本高,效率低,准确度低,数据有限;且易受环境影响(如海底管道有时会被沉积物或海底生物覆盖而隐藏管道的腐蚀或损伤部位,导致目视检测失效),无法适应浑浊昏暗的环境。部分水下机器人运动基于磁吸附,而这种技术存在着许多问题,比如磁吸附作用太强导致母机难以从磁性管道上将机器人抓取回收,磁吸附作用太强导致爬壁机器人可能需要更强大的动力系统才能在管道表面移动并增加了能耗和系统复杂度,磁吸附不适用于因覆盖防腐蚀膜等涂层而磁性弱或者非磁性材料的管道,磁吸附使用的强磁场可能干扰传感器或其他设备(尤其是那些对磁场敏感的设备)的正常运作。
3、因此,研发结构合理、运动稳定、具备高精度高效率超声检测功能、使用推进器进行吸附的机器车能解决上述问题,实现海底管道的运维自动化,并在提高效益的同时保障员工的安全。
技术实现思路
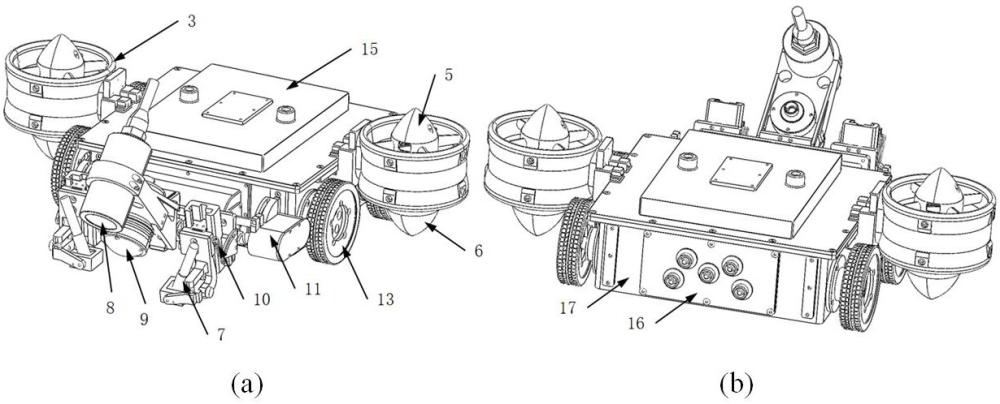
1、为了解决背景技术中的问题,本发明融合机电一体化技术,以实现海底管道的自动化超声无损检测为目标,提供了一种推进器吸附的海底超声无损检测爬壁机器车。机器车左右两侧布局的推进器是整套设备的关键部件之一,其个数和布局对整套设备起到了决定性作用,能产生推力使机器车吸附在海底管道,并进行稳定的周向运动。在运动过程中,机器车通过一对tofd探头,对海底管道进行内部缺陷探伤。
2、本发明采用的技术方案如下:
3、一、一种推进器吸附的海底超声无损检测爬壁机器车
4、包括车体,以及安装于车体上的推进器、超声无损检测装置和运动机构;通过运动机构控制车体绕海底管道周向运动;车体两侧对称安装有推进器,用于将车体吸附于海底管道表面;超声无损检测装置安装于车体前侧,用于检测海底管道缺陷。
5、所述推进器包括控制系统、壳体和推进器内部结构,内部结构包括电动机、桨叶、前端盖和后端盖,推进器内部结构通过支架支撑和固定于壳体内,推进器上下两端安装有呈流线型结构的前端盖和后端盖;多片桨叶呈周向且与电动机同轴布置,所述桨叶为螺旋桨叶,两侧推进器的螺旋桨叶的旋向相反,一侧推进器的桨叶为正桨,另一侧推进器的桨叶为反桨,以此抵消两推进器所产生的反转力矩,两侧推进器产生的推力方向相同,均朝向管道圆心;通过电动机驱动桨叶旋转,并产生推力,使机器车吸附于海底管道表面。
6、所述控制系统采用pwm控制,通过电子调速器控制推进器电动机的转速和方向,以此控制推进器桨叶的旋转速度和方向,改变推进器的推力大小,使机器车吸附于海底管道表面,适应机器车在管道周向外围不同位置的运动;所述推进器的推力通过下述方法得到:对机器车重力、管道对机器车的支持力和摩擦力、机器车所受浮力和阻力以及推进器的推力进行受力分析,并计算得到机器车在管道不同位置时所需的推进器推力。
7、所述超声无损检测装置包括一对tofd探头、相机、防水灯、压紧机构和丝杠移动扫查机构,丝杠移动扫查机构前部通过底板安装有两个压紧机构和相机安装座,相机安装座固定于底板中间,两个压紧机构固定于底板两侧;每个压紧机构上装配有一个tofd探头,相机和防水灯通过相机安装座布置于一对tofd探头中间;所述的一对tofd探头为一发一收两个相对于焊缝中心线对称布置的宽带窄脉冲探头;通过压紧机构调整tofd探头的纵向位置和俯仰角度,通过丝杠移动扫查机构调整tofd探头的横向位置和俯仰角度,使海底管道焊缝位于双探头的对称中心线,且使双探头紧密贴合海底管道表面。
8、所述压紧机构包括角度调节板、旋转导轨、滑块、安装座、螺栓ⅱ、u形块、探头基座、固定座;固定座两侧固定有角度调节板,底端通过铰接连接有旋转导轨;角度调节板上开设有弧形槽,两根螺栓ⅰ分别穿过两侧角度调节板的弧形槽伸入旋转导轨两侧设置的螺栓孔;旋转导轨开设有竖向滑槽,安装座背部安装有沿竖向滑槽滑动的滑块,安装座前部通过螺栓ⅱ连接有u形块,u形块与探头基座通过铰接连接,探头基座用于安装tofd探头;通过拧紧螺栓ⅰ限制旋转导轨与角度调节板间的转动。
9、滑块两侧通过两根弹簧连接至旋转导轨两侧,u形块与安装座之间设置有为u形块提供竖直方向缓冲弹力的竖向弹簧。
10、通过旋转导轨沿角度调节板的滑动、u形块绕螺栓ⅱ的转动、铰接于u形块的探头基座的转动调节探头的俯仰角度;通过安装座沿旋转导轨竖向滑槽的滑动调节探头的纵向位置。
11、所述丝杠移动扫查机构包括扫查安装座、一体伺服驱动电机、主动轮、从动轮、往复丝杠、丝杠螺母、扫查连接角度板、扫查连接底板、石墨铜套轴承;一体伺服驱动电机的输出轴与主动轮连接,往复丝杠上安装有丝杆螺母,往复丝杠一端与从动轮连接,从动轮与主动轮通过另一圆柱齿轮啮合传动;丝杠螺母上固定有安装压紧机构和相机安装座的底板;
12、往复丝杠两端分别通过扫查连接角度板连接至扫查安装座两侧的扫查连接底板上;扫查连接底板侧面开设有弧形槽,扫查连接角度板上设置有沿扫查连接底板弧形槽滑动的螺栓ⅲ;扫查连接角度板顶面开设有弧形槽,扫查连接底板上设置有穿过扫查连接角度板弧形槽的固定螺栓;扫查连接角度板和扫查连接底板之间通过石墨铜套轴承铰接相连,可通过拧紧固定螺栓限制扫查连接角度板和扫查连接底板之间的转动;通过扫查连接角度板绕扫查连接底板转动,调节丝杠螺母上底板的俯仰角度,从而改变两个tofd探头的俯仰角度。往复丝杠在传动到达极限行程后会自动返程,以避免机械卡死导致电机损坏的情况。
13、车体内用于放置车轮驱动机构、电路以及电路板,并通过屏蔽罩将车轮驱动机构与电路及电路板隔离;两个tofd探头、相机、防水灯和外置电源的电线穿过车体后端的金属防水接头连接到车体内的电路板上,两个推进器的电线分别穿过车体顶部的两空心防水密封螺丝连接到车体内的电路板上,两个空心防水密封螺丝分别安装于车体顶部开设的两凸起通孔内。
14、所述车体设计了用于安装密封圈的凹槽,以满足密封性,能防止内部电机、电路、电路板遇水受损,丝杠移动扫查机构、车轴端盖、上盖板和接插件盖板与车下部壳体之间的密封采用了丁腈橡胶密封圈,车轮轴处的动密封采用了骨架油封密封圈。
15、所述运动机构包括四个车轮和两套车轮驱动机构,四个车轮对称分布于车体左右两侧,两套车轮驱动机构固定于车体内部,用于分别驱动车体两侧的车轮;车轮驱动机构包括驱动电机、动力齿轮、齿轮、斜齿轮ⅰ、斜齿轮ⅱ、斜齿轮ⅲ、斜齿轮ⅳ和横杆,斜齿轮ⅲ和斜齿轮ⅳ分别与同侧的两个车轮同轴连接,横杆上固定有齿轮、斜齿轮ⅰ和斜齿轮ⅱ,斜齿轮ⅰ和斜齿轮ⅱ分别与斜齿轮ⅲ和斜齿轮ⅳ啮合,驱动电机的输出轴与动力齿轮连接,动力齿轮与横杆上的齿轮相啮合。
16、车轮驱动机构中驱动电机驱动动力齿轮转动,从而带动齿轮以及与齿轮位于同一横杆上的斜齿轮ⅰ和斜齿轮ⅱ转动,再传动使斜齿轮ⅲ和斜齿轮ⅳ转动,最终带动同侧的两个车轮随之转动。
17、二、上述爬壁机器车的海底超声无损检测方法
18、首先根据所需检测的管道外径手动调节压紧机构和丝杠移动扫查机构的角度板使tofd探头稍过度贴合管壁,完成粗调;当机器车通过推进器吸附在管壁上时,压紧机构受到管壁提供的支持力,使铰接于u形块上的探头基座受力转动,同时使四根弹簧受力产生形变并提供拉力和推力,从而带动u形块绕螺栓ⅱ转动,带动固定在滑块上的安装座沿旋转导轨的竖向滑槽运动,直至弹簧受力平衡停止运动,完成两个tofd探头的位置和角度的细调,使探头紧密贴合管壁曲面;通过弹簧对压紧机构中各部件的弹力,使得探头基座底面在机器车运动过程中始终保持与管道壁紧密贴合;
19、然后通过运动机构控制机器车绕海底管道表面运动,同时通过控制系统控制推进器的推力大小,使机器车在运动过程中吸附于海底管道表面;通过控制推进器的推力大小适应机器车在管道周向外围不同位置的运动,以及实现机器车与海底管道的贴合和脱落,最终实现机器车沿海底管道的稳定周向运动;
20、在运动过程中,通过tofd探头对海底管道进行实时检测,tofd探头中的发射探头产生非聚焦纵波波束以一定角度入射到被检工件中,部分波束(直通波)沿近表面传播被tofd探头中的接收探头接收,另一部分波束经底面反射或缺陷衍射后被接收探头接收,最后形成a扫描信号,再将信号的相位和幅值转换为256级灰度图像,得到用于辨识缺陷的tofd-d检测图像;通过缺陷上下端点的衍射信号及其传播时差分析确定缺陷的数量、位置和尺寸,从而实现对海底管道的超声无损内部缺陷检测;
21、在检测过程中,相机在防水灯的照明辅助下进行目标识别,以捕捉海底管道上焊缝的可视化信息。
22、在检测过程中,实时监测焊缝是否位于两个tofd探头的对称中心线,当机器车运动时出现焊缝偏离两tofd探头对称中心线的情况时,经过相机的信息反馈后,工作人员通过控制丝杠移动扫查机构实时调节两tofd探头的横向位置,使焊缝重新位于两tofd探头对称中心线。
23、本发明的有益效果是:
24、本发明装置采用推进器吸附和tofd探头检测,结构合理,运动稳定,具备高精度高效率超声检测功能。创新性采用并合理布局推进器和tofd探头,能实现稳定的绕海底管道的圆周运动和可靠的超声无损检测,且易于进行控制。
25、本发明装置中相机可提供可视化的信息,对待检测区域进行定位和评估,检测焊缝是否位于两个tofd探头的对称中心线,防水灯可提供足够的照明,确保相机能够准确地进行目标识别,捕捉到清晰的图像,确保检测工作的准确性和可靠性。压紧机构和丝杠移动扫查机构可调整探头至合适的位置和角度,使双探头紧密贴合在海底管道表面,也使焊缝位于两个探头的对称中心线。车轮作为机器车的行进部件,通过转动来推动机器车在海底管道表面上移动,且带有非对称花纹的轮胎,可提高机器车的运动稳定性并减少噪声。此外,车轮驱动机构采用电机驱动,利用斜齿轮传动增大输出转矩和转速。
26、本发明采用tofd探头检测海底管道,能以数字方式存储检测数据,可进行多方位分析,可对检出的缺陷进行立体复原,具有轻便高效、穿透力强、灵敏度高、检出率高、实时性好、准确性好、重复性好、检测时间短、检测深度大的优点,解决了基于目视检测的水下机器人受能见度限制,无法适应浑浊昏暗的海底环境,成本高,效率低,准确度低,数据有限,易受环境影响的问题。
27、不管环境如何恶劣、多变和复杂,也不管运输对象可能是有毒或易燃、易爆物料,推进器吸附的海底超声无损检测爬壁机器车都能实现海底管道的运维智能化和自动化,并在提高效益的同时保障员工的安全,避免了人工巡检效率低、成本高、准确度低、安全隐患大、易遗漏损伤、检测范围有限的问题。
- 还没有人留言评论。精彩留言会获得点赞!