具有传送元件的容器处理装置的制作方法
1.本发明涉及一种根据权利要求1的前序部分所述的容器处理装置、特别是用于以液态填料填充罐子或这类的容器的填充机。
背景技术:
2.容器处理装置、特别是用于以液态填料填充罐子、也特别是压力填充罐子的填充机对于本领域技术人员以不同的方式公知。在此,填充机的罐子通过构造为容器输入装置的第一传送装置被输送,然后被转送到在处理方向上安置在下游且绕着机器轴线回转的转子上,以及从在处理方向上又安置在转子下游且构造为容器输出装置的第二传送装置被输出。
3.沿着这种方式构造的、例如在填充机中实现的容器处理线可以设置多个分别绕着竖直的机器轴线回转驱动的传送元件,所述传送元件符合传送方式地彼此相连并且构成容器处理线,从而容器、特别是罐子通过从回转驱动的传送元件转送到在传送方向上紧接着其的传送元件而沿着多次转向的容器处理线被输送。
4.在此也可以设置,相邻的传送元件是回转地循环运转的传送元件以及与其相邻的、线性地输送容器的传送元件。所述传送元件也构造在填充机中。容器输出装置特别是能够以传送星或线性输送机的形式实现,借助于所述容器输出装置将已填充的、然而还敞开的罐子继续输送到封闭机、例如封罐机上。
5.在构造为线性输送机的传送元件中,容器基本上直线地或者替换地也曲线形地被传送。在此,所述传送基本上也在不改变容器的位置高度的情况下进行,然而这不是强制的。所述构造为线性输送机的传送元件也可以布置在构造为回转的传送元件的两个传送元件之间。
6.在将罐子在填充机内部从传送元件转送到在处理方向上随后的传送元件时,通常导致罐子的运动轨迹中的曲率改变并且由此导致作用于罐子的向心加速度改变。在此会导致,相应的罐子遭受由强的加速力引起的横向冲击,或经受所述横向冲击。由于所述横向冲击会导致填料从罐口溢出。
7.在此重要的是,高的容器通过量(每时间单位被输送的罐子或容器的数量)通常导致更强的加速力并且由此导致更强的横向冲击并且由此也导致增强了填料从罐口溢出。
8.因此,现有技术的构造为装罐机的填充机以及在处理方向上安置在下游的封罐机通常也具有不同的节距。这导致,罐子在传送装置上在装罐机和安置在下游的封罐机之间转送时必须被加速到更高的速度。所述加速也主要对在这个时间点还未被封闭的罐子的溢出状况负有责任。总体上这特别是从卫生角度、然而也由于产品损失是不期望的并且不利的。
9.在实践中,由此通常相关的填充机、特别是罐子填充机然而也和/或封闭机的总效率如此程度地被减小,直到敞开的罐子沿着容器处理线恰好不发生溢出,或者如此程度地被减小,以使得还总是发生的溢出损失可以被接受。最后,所述方法导致显著的效率损失
(每小时已填充的罐子或容器数量),这由于与此相关的成本影响而是非常不期望的。
技术实现要素:
10.由此出发,本发明的任务在于,给出一种特别有利的容器处理装置,借助于所述容器处理装置实现沿着容器处理线尽可能无横向冲击地传送容器以及容器处理装置的更大的效率(每时间单位的容器数量)。
11.在此例如设置,容器处理装置构造为用于以液态的、能流动的或松散的填料填充罐子或这类的容器的填充机。同样设置,容器处理装置构造为用于封闭之前被填充的容器的封闭机。
12.该任务通过一种根据独立权利要求1的特征所述的容器处理装置、特别是用于以液态的、能流动的或松散的填料填充容器、特别是罐子或这类的容器的填充机来解决。从属权利要求在此涉及本发明的特别有利的进一步方案。
13.根据一个主要的方面,本发明涉及一种容器处理装置、特别是用于沿着在处理方向上延伸的容器处理线以液态填料填充罐子或这类的容器的填充机。容器处理装置在此包括构造为容器输入装置的第一传送装置、在处理方向上安置在下游且绕着机器轴线回转的转子、以及在处理方向上又安置在转子下游且构造为容器输出装置的第二传送装置。
14.在此在回转的转子上构造多个处理位置以及还设置与所述转子同方向地同步地绕着机器轴线一起运转的传送元件,所述传送元件在周缘上围绕机器轴线分布地具有多个传送袋槽。回转的转子和一起运转的传送元件也可以一体地或者作为共同的组件构造。
15.传送袋槽还分别具有至少一个关于传送元件的回转方向在前的前边缘和至少一个关于回转方向在后的后边缘,其中,至少所述后边缘至少在部分区域中形成用于接触配合地传送容器的第一接触面。
16.根据本发明在此设置,给相应的传送袋槽的相应的后边缘分别配置传送指,所述传送指具有至少一个第二接触面,所述第二接触面在径向方向上远离机器轴线取向的方向上优选地曲线形地延长在后边缘上形成的第一接触面。
17.在本发明的框架内,“在径向方向上远离机器轴线取向的方向上”理解为从机器轴线出发径向向外。
18.根据一个有利的实施变体可以在此设置,第二接触面在远离机器轴线取向的方向上与第一接触面直接相邻地衔接。
19.根据一个另外的有利的实施变体可以在此设置,设置在传送指上的第二接触面构造为,当在离开从转子的或传送元件的传送袋槽的推出运动的起始点之后将容器从转子转送到在处理方向上随后的第二传送装置上时容器在所述容器的运动轨迹的曲率改变期间的径向速度和/或切向速度与所述容器在到达推出运动的起始点之前被传送期间的周向速度相比这样被增大和/或减慢,以使得作用于容器的向心加速度总体上被减小和/或连续地、即尽可能无冲击地被改变。
20.根据一个另外的有利的实施变体可以在此设置,相应的传送指的第二接触面在第一接触面区段中在径向方向上相对于机器轴线切向地与第一接触面衔接,亦即这样优选地,第一接触面和第二接触面之间的相应的过渡部平滑地构造。
21.根据一个另外的有利的实施变体可以在此设置,相应的传送指布置在传送元件的
周缘上。
22.根据一个另外的有利的实施变体可以在此设置,第二接触面在远离机器轴线取向的方向上具有与第一接触面区段相邻地衔接的第二接触面区段,所述第二接触面区段形成凹形地构造的加速区段或凸形地构造的减速区段。
23.根据一个另外的有利的实施变体可以在此设置,第二接触面区段在远离机器轴线取向的方向上相应地与第一接触面区段直接相邻地衔接。
24.根据一个另外的有利的实施变体可以在此设置,第二接触面在与第一接触面区段在径向方向上远离机器轴线取向地衔接的第二接触面区段中首先凹形地拱曲并且接着凸形地拱曲,从而在第二接触面区段中形成加速区段并且接着形成减速区段。
25.根据一个另外的有利的实施变体可以在此设置,第二接触面在与第一接触面区段在径向方向上远离机器侧取向地衔接的第二接触面区段中首先凸形地并且接着凹形地拱曲,从而在第二接触面区段中形成减速区段以及与该减速区段衔接的加速区段。
26.根据一个另外的有利的实施变体,凹形的、凸形的和线性的面区段有利地这样彼此组合,以使得积极地影响填料的溢出状况,这意味着,填料的溢出运动的高度被减小。
27.根据一个另外的有利的实施变体可以在此设置,第二接触面区段构造为回旋曲线或布劳斯曲线或三角函数或高阶数、特别是2个阶数或更多个阶数的多项式。
28.根据一个另外的有利的实施变体可以在此设置,第二接触面具有在远离机器轴线取向的方向上与第二接触面区段衔接的第三接触面区段,所述第三接触面区段与第二接触面区段优选地直接相邻地衔接,并且所述第三接触面区段具有与第一接触面区段相同的径向取向。
29.根据一个另外的有利的实施变体可以在此设置,第二接触面具有在远离机器轴线取向的方向上与第三接触面区段凸形地衔接的第四接触面区段,所述第四接触面区段优选地直接相邻地以及凸形地与第三接触面区段衔接。
30.根据一个另外的有利的实施变体可以在此设置,第二传送元件为了传送容器在脱离通过传送元件的传送指的干预之后而具有至少一个栏杆导向装置,容器沿着所述栏杆导向装置在处理方向上至少在一侧被侧向地引导。
31.根据一个另外的有利的实施变体可以在此设置,第二传送装置具有侧向地一起回转的传送指,其中,相应的容器借助于设置在传送元件上的传送指的接触面被加速或被减速到与第二传送装置的传送指速度相应的速度,从而实现在转子和第二传送装置之间平稳地转送。
32.根据一个另外的有利的实施变体可以在此设置,容器处理装置构造为填充机和/或封闭机。
[0033]“回旋曲线”在本发明的意义中理解为下述曲线,该曲线的曲率持续线性地增大或减小。在此,曲线的曲率半径与弧长的乘积形成恒量。换句话说,曲率在曲线的每个部位上与其直至该部位的弧的长度成正比。
[0034]“容器”在本发明的意义中理解为任何容器、特别是瓶子、罐子、杯子等,所述容器分别由金属、玻璃和/或塑料、优选地由pet(聚对苯二甲酸乙二醇酯)构成。
[0035]
表述“基本上”或“大约”在本发明的意义中是指与相应的准确值相差+/
‑
10%、优选地+/
‑
5%的偏差和/或呈对于功能无关紧要的改变形式的偏差。
[0036]
本发明的进一步方案、优点和应用可能性也由实施例的下述说明并且由附图得出。在此,所有描述的和/或绘图示出的特征自身或者以任意组合原则上与其在权利要求或者其引用关系中的组合无关地是本发明的内容。权利要求的内容也是说明书的组成部分。
附图说明
[0037]
下面借助于实施例的附图详细地阐述本发明。附图中:
[0038]
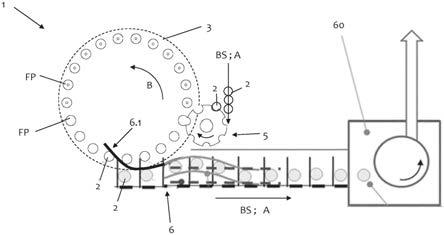
图1示例性地并且以示意性的俯视图示出用于以液态填料填充罐子或这类的容器的填充机;
[0039]
图2示例性地并且以简图示出用于根据图1的填充机的填充位置的、具有在密封位置中布置在填充元件上的罐子的一个可能的实施变体;
[0040]
图3示例性地并且以示意性的俯视图示出具有根据本发明的传送指的一个实施变体的传送元件的局部图;和
[0041]
图4示例性地并且以示意性的俯视图示出具有根据本发明的传送指的一个另外的实施变体的传送元件的局部图。
[0042]
在附图中对于本发明的相同的或相同作用的元件使用相同的附图标记。此外,为了简明在各个附图中仅仅示出需要用于描述相应附图的附图标记。
具体实施方式
[0043]
在图1中通常以1示出的容器处理装置在此构造为填充机并且特别是用于沿着在处理方向a上延伸的容器处理线bs以液态填料、例如以啤酒或软饮料压力填充呈罐子形式的容器2。
[0044]
填充机1构造为具有转子3的回转的结构型式,所述转子在填充运行期间在回转方向b上绕着竖直的机器轴线ma回转地被驱动并且在所述转子的周缘上具有多个填充位置fp,待填充的容器2通过构造为容器输入装置的第一传送装置5输送到所述填充位置,并且已填充的容器2在构造为容器输出装置的第二传送装置6上从所述填充位置被取出。在此,容器输入装置5可以例如构造为推入星或输入星。
[0045]
构造为容器输出装置的第二传送装置6特别是可以构造为线性输送机,所述线性输送机将已填充的、然而还未封闭的罐子2在离开从传送元件4的相应的传送袋槽50的推出运动的起始点sp之后承接并且沿着容器处理线bs在传送方向a上继续输送。接着,罐子2被输送到封闭机60、特别是封罐机上,并且在那里以对于本领域技术人员已知的方式被密封地封闭。在将填充机1隔离(verblockung)的范畴内,封闭机60可以构造为填充设备的部分或组成部分并且从而构造为填充机1的部分或组成部分。
[0046]
特别是在罐子2从填充机1的转子3转送到在传送方向a上随后的第二传送装置6上时,在离开从传送元件4的传送袋槽50的推出运动的起始点sp之后发生在罐子2的运动轨迹中的曲率改变并且由此发生作用于罐子2的向心加速度改变。为了在此改善产生的向心加速度或向心加速度的改变以及转送的整个过程,本发明提出一种下面详细描述的解决方案。推出运动的起始点sp理解为下述时刻,罐子2在该时刻开始从相应的传送袋槽50运动出去。
[0047]
在转子3在容器输入装置5和容器输出装置6之间的回转运动的角度范围上特别是
进行罐子2的填充,所述罐子为此以其容器轴线平行于机器轴线ma并且分别与填充位置fp的轴线fa同轴地或基本上同轴地布置。所述过程下面对于回转填充机在示例性地构造的填充元件7上被描述,然而类似地也能够应用在线性填充机中,例如由此也可以填充用于啤酒的pet
‑
大捆、所谓的keg。
[0048]
在图2中在此示例性地示出形成填充位置的处理位置fp的填充元件7的结构。特别是本发明然而明确地不局限于在图2中示出的填充元件7和/或填充机1的示出的结构来理解。确切地说,容器处理装置1也可以构造为封闭机60。所述封闭机对于本领域技术人员例如由de 10 2009 017 109 a1已知。在此在de 10 2009 017 109 a1中描述的保持板16在技术上能够与本发明的转子3相应,多个作为封闭位置形成的容器处理位置fp设置在所述保持板上。
[0049]
在此,每个处理位置fp基本上都包括填充元件7,所述填充元件与其余处理位置fp的填充元件7一起布置在转子3的周缘上并且由此构成填充机1的填充系统。此外对于所有处理位置fp共同的并且在示出的实施变体中构造为环形容器的填料容器8位于转子2上,所述填料容器在填充运行期间以液态填料被部分地填充,亦即在形成用于填料的下部的液体空间8.1以及气体空间8.2的情况下,所述气体空间由在填充压力下例如处于3bar至5bar的惰性气体、例如co2气体或氮气占据。每个填充元件7通过自己的、具有流量计9的产品管路10与液体空间8.1连接。
[0050]
在示出的实施方式中在转子3此外设置三个围绕机器轴线ma的并且对于所有处理位置fp或填充元件7共同的环形管道、即第一环形管道11、第二环形管道12以及第三环形管道40。第一环形管道11用作用于特别是也在容器2冲洗和/或卸压时从相应的填充元件7排出空气的返回气体收集管道。
[0051]
第二环形管道12可以构造为返回气体收集管道,使用在冲洗和/或卸压阶段期间的冲洗气体和/或卸压气体在所述返回气体收集管道中至少部分地被导出,以便至少部分地又被使用用于预先冲洗容器内腔2.1。
[0052]
第三环形管道40在填充运行期间以下面还详细描述的方式引导处于压力下的惰性气体、例如co2气体或氮气。第一环形管道11中的压力例如是大气压力或负压,而第二环形管道12中的压力更容易产生高压,所述高压可以基本上相应于例如0.2至0.5bar的冲洗和/或卸压压力。第三环形管道40中的压力等于或基本上等于气体空间8.2中的填充压力pf或略微小于该填充压力。
[0053]
填充元件7包括具有液体通道14的填充元件壳体13,所述液体通道以其上部区域与产品管路10连接,并且在填充元件7的下侧上构造与轴线fa同心地围绕的环形的输出开口15,在填充时可以通过所述输出开口将液态填料输送给相应的容器2。在液体通道14中在填料的流动方向上在输出开口15之前设置液体阀16,所述液体阀基本上由布置在阀挺杆17上的阀体18构成。
[0054]
在图2中示出在关闭状态中的液体阀16,在所述关闭状态中,阀体18贴靠在液体通道14中的、构造为密封面的阀面上。为了开启液体阀16,阀体18借助与轴线fa同轴地布置的阀挺杆17通过优选地气动控制的操纵元件19被提起。阀挺杆17构造为导气管,亦即具有气体管道20,所述气体管道与轴线fa同轴地在下侧布置在输出开口15的区域中并且由所述输出开口环形围绕地敞开并且在阀挺杆17的上端部处通到构造在填充元件壳体13中的气体
空间21中。
[0055]
为了在压力填充相应的容器2的容器内腔2.1时控制填充过程的不同的阶段,在填充元件壳体13中构造多个可控的气体路径。
[0056]
通过构造在填充元件壳体13中的受控的第一气体路径26能够使两个返回气体开口27.1和28.1与第一环形管道11连接。返回气体开口27.1和28.1分别设置在填充元件7下侧,亦即相对于输出开口15关于轴线fa径向向外错开并且此外在轴线fa的方向上轴向地设置在输出开口15上方。返回气体开口27.1和28.1在示出的实施方式中绕着轴线fa以180
°
错开地布置并且构成气体管道27和28的下部的开口或切口,所述开口或切口在填充元件壳体13中从相应的返回气体开口27.1或28.1平行于或基本上平行于轴线fa向上延伸。气体通道27和28是受控的第一气体路径26的部分并且分别包含控制阀29或30。控制阀29和30在示出的实施方式中又是能气动操纵的阀。控制阀29和30的入口分别与返回气体管道27或28连接。这两个控制阀29和30的出口与第一环形管道11连接。
[0057]
通过同样设置在填充元件壳体13中的可控的第二气体路径42可以使返回气体开口27.1与第二环形管道12连接。在此,第二气体路径42远离返回气体开口27.1利用第一气体路径26的气体管道27,该第二气体路径在控制阀29之前分支到气体管道27a中,然而与气体管道27流体连接。此外,可控的第二气体路径42设置控制阀24,该控制阀能够被气动地操纵。控制阀24的入口在此与气体管道27a流体连接并且出口与第二环形管道12流体连接。
[0058]
气体空间21能够通过可控的第三气体路径22受控地与第三环形管道40连接。所述第三气体路径22还包含控制阀23,该控制阀布置在第三环形管道40和气体空间21之间的连接中并且通过气体管道25与气体空间21连接。控制阀23也可以在此构造为能气动操纵的阀。
[0059]
填充元件7此外包括中心定位钟31,所述中心定位钟至少在冲洗时、在预加载时以及在填充时以密封环31.1密封地贴靠到立放在容器承载件32上的容器2的开口边缘上,从而构成对于周围环境通过填充元件7、中心定位钟31和容器2密封的空间,输出开口15、气体通道20的下端部以及返回气体开口27.1和28.1也通到该空间中。此外,容器2借助于下降的中心定位钟31被夹紧、即保持。通过呈例如以填充压力被施加的气箱形式的气动的操纵元件33将中心定位钟31通过拉杆34在所述中心定位钟的密封地贴靠在容器2上的下部位置中预加载。通过设置在拉杆34上的曲线辊轮35与外部的不随着转子3回转的升降凸轮相互作用使得中心定位钟31下降以将容器2推入到填充位置fp中或者提升以将已填充的容器2从填充位置fp移出。
[0060]
在此,在转子3在容器输入装置5和容器输出装置6之间借助于在转子3下方的、然而与转子3同方向地并且同步地绕着机器轴线ma一起运转的传送元件4的回转运动的角度范围内将回转运动传递到罐子2上。传送元件3的回转方向ur在此相应于转子3的回转方向b,因此所述回转方向是同方向的并且同步的。
[0061]
更具体地(图3),为此在传送元件4的周缘u上围绕机器轴线ma分布地构造多个传送袋槽50,所述传送袋槽分别具有关于传送元件4的回转方向ur在前的至少一个前边缘51.1以及关于回转方向ur在后的至少一个后边缘51.2,其中,至少后边缘51.2至少在部分区域中形成用于在对应的传送袋槽50中接触配合地传送相应的罐子2的第一接触面af1。因此也就是说,传送袋槽50的相应的后边缘51.2至少与其第一接触面af1一起构造为推动边
缘,能够借助于所述推动边缘产生作用于罐子2的在回转方向ur上驱动的推动运动。优选地,相应的传送袋槽50、然而至少后边缘51.2在俯视图中部分圆形地或圆曲线形地构造。
[0062]
相应的传送袋槽50在此圆曲线形地至少部分周向地以及接触配合地在相应的罐子2的外表面的朝向机器轴线ma的部分周缘、即关于机器轴线ma在径向内部的一侧上围绕罐子2的相应的外周缘。
[0063]
此外,为了在罐子2的外表面的与相应的传送袋槽50对置的部分周缘处、即与相应的传送袋槽50对置且关于机器轴线ma在径向外部的一侧引导罐子2可以设置导向栏杆6.1,所述导向栏杆至少部分周向地在容器输入装置5和容器输出装置6之间沿着容器处理线bs设置在转子3的区域中、亦即优选地围绕机器轴线ma圆曲线形地设置。
[0064]
根据一个另外的有利的实施变体可以在此设置,导向栏杆的至少单个的区段构造为回旋曲线或布劳斯曲线或三角函数或高阶数的多项式、特别是构造为2个或更多个阶数的多项式。
[0065]
根据本发明在此设置,给相应的传送袋槽50的相应的后边缘51.2分别配置传送指54,所述传送指具有至少一个第二接触面af2,所述第二接触面在远离机器轴线ma取向的径向方向上曲线形地延长在后边缘51.2上形成的第一接触面af1。在此,第二接触面af2在远离机器轴线ma取向的方向上与第一接触面af1优选地直接相邻地衔接。
[0066]
设置在传送指54上的第二接触面af2在此特别是构造为,当在离开从传送元件4的相应的传送袋槽50的推出运动的起始点sp之后将罐子2从填充机1的转子3转送到在处理方向a上随后的第二传送装置6上时罐子2在所述罐子2的运动轨迹的曲率改变期间的径向速度和/或切向速度与在所述罐子在到达推出运动sp的起始点之前被传送期间的周向速度相比被增大和/或减慢,以便由此使作用于罐子2的向心加速度减小。
[0067]
有利地为此设置,相应的传送指54的第二接触面af2在第一接触面区段afa1中在径向方向上相对于机器轴线ma切向地与第一接触面af1衔接。在此,第一接触面af1和第二接触面af1之间的相应的过渡部平滑地构造。
[0068]
此外有利地可以设置,相应的传送指54布置在传送元件4的周缘u上。传送元件4在此可以圆盘形地、特别是圆环形地构造。
[0069]
根据在处理方向a上安置在转子3下游的封闭机60的节距是较大地还是较小地构造可以在此设置,第二接触面af2在远离机器轴线ma取向的方向上具有与第一接触面区段afa1相邻地衔接的第二接触面区段afa2,所述第二接触面区段形成凹形地构造的加速区段或凸形地构造的减速区段。此外,这也可以根据容器形状和/或填料特性、特别是液体粘度进行。这有利地在下述情况中被应用,当容器处理装置1是所谓的隔离的设备,在所述隔离的设备中填充机和封闭机60构造为结构单元,也就是说,这两个设备部分直接彼此相连并且容器2在这两个设备部分之间强制引导地被转送。
[0070]
更具体地在此设置,第二接触面区段afa2在远离机器轴线ma取向的方向上作为凹形地构造的加速区段延伸(图4)。尤其当封闭机60的节距构造为大于转子3的节距时是这种情况。
[0071]
取而代之地设置,第二接触面区段afa2在远离机器轴线ma取向的方向上作为凸形地构造的减速区段延伸。尤其当封闭机60的节距构造为小于转子3的节距时是这种情况。
[0072]
在此,第二接触面区段afa2在远离机器轴线ma取向的方向上相应地与第一接触面
区段afa1优选地直接相邻地衔接。
[0073]
在此也可以设置,第二接触面af2在与第一接触面区段afa1在径向方向上远离机器轴线ma取向地衔接的、特别是直接相邻地衔接的第二接触面区段afa2中首先凹形地拱曲并且接着凸形地拱曲,从而在第二接触面区段中afa2中首先形成加速区段并且接着形成减速区段。(图3)在此优选地,第二接触面区段afa2构造为回旋曲线或布劳斯曲线或三角函数或高阶数、特别是2个阶数或更多个阶数的多项式。
[0074]
在此也可以设置,第二接触面af2具有在远离机器轴线ma取向的方向上与第二接触面区段afa2衔接的第三接触面区段afa3,所述第三接触面区段与第二接触面区段afa2优选地直接相邻地衔接,并且所述第三接触面区段具有与第一接触面区段afa1相同的径向取向(图3)。
[0075]
此外也可以设置,第二接触面af2具有在远离机器轴线ma取向的方向上与第三接触面区段afa3凸形地衔接的第四接触面区段afa4,该第四接触面区段与第三接触面区段afa3优选地直接相邻地以及凸形地衔接(图3)。
[0076]
此外也可以设置,第二接触面af2具有凹形地与第三接触面区段afa3在远离机器轴线ma取向的方向上衔接的第四接触面区段afa4,该第四接触面区段与第三接触面区段afa3优选地直接相邻地以及凹形地衔接。
[0077]
如前所述地,罐子2在离开起始点sp之后由构造为容器输出装置的第二传送装置6转运。为此,第二传送装置6可以设置为连续循环运转的传送带,所述传送带例如构造为铰链带,罐子2立在传送带上地被输送。为了在脱离通过传送元件4的传送指54的干预之后传送罐子2,第二传送元件4可以具有至少一个栏杆导向装置6.1,罐子2沿着所述栏杆导向装置在处理方向a上至少在一侧被侧向地引导。
[0078]
也可以设置,替代侧向的栏杆导向装置6.1,第二传送装置6具有与传送装置6侧向地一起回转的传送指,其中,相应的罐子2借助于设置在传送元件4上的传送指54的第二接触面af2被加速或被减速到与第二传送装置6的传送指的速度相应的速度,从而实现在转子3和第二传送装置6之间平稳地转送。
[0079]
本发明描述了以上实施例。可理解的是,在由此不脱离本发明的由权利要求确定的保护范围的情况下能实现多个改变或变体。
[0080]
前述说明基本上描述了下述情况,即在周缘u上围绕机器轴线ma分布地设置多个传送袋槽,所述传送袋槽分别具有关于传送元件4的回转方向ur在前的至少一个前边缘51.1以及关于回转方向ur在后的至少一个后边缘51.2,其中,至少后边缘51.2至少在部分区域中形成第一接触面af1用于接触配合地传送容器2,其中,给相应的传送袋槽50的相应的后边缘51.2分别配置传送指54,所述传送指具有至少一个第二接触面af2,所述第二接触面在远离机器轴线ma取向的径向方向上曲线形地延长在后边缘51.2上形成的第一接触面af1。
[0081]
在此重要的是,当容器2通过传送袋槽50和/或传送指54被推动时,则该实施方案是特别有利的。
[0082]
在另外的应用情况或实施方式中然而也可以提出,容器2通过传送袋槽50和/或传送指54被拦住,也就是说,容器2贴靠在第一边缘51.1上或者贴靠在布置在第一边缘51.1上的传送指54上。当容器已经在其还处于传送袋槽50中期间以大于传送元件4的周向速度的
速度被推送到线性输送机上时,则例如会存在所述应用情况。
[0083]
本身可理解的是,在下述布置中,图3和4中所示的构件和布置在不改变的传送方向的情况下并且在不改变的回转方向的情况下可以与图3和4对称地实施。
[0084]
此外,前述说明基本上涉及当已填充的容器离开构造为填充机的容器处理机时应注意的过程和阶段。
[0085]
在本发明的框架内同样设置,根据本发明的技术教导也应用于将已填充的、然而还未封闭的容器送入到构造为封闭机的容器处理机中。这是可能的,因为相应的物理规律类似地适用于封闭机,并且根据本发明的教导由此也能够有利地应用于封闭机中。
[0086]
权利要求的内容表明是本说明的内容。
[0087]
附图标记列表
[0088]
1填充机
[0089]
2容器
[0090]
2.1容器内腔
[0091]
3转子
[0092]
4传送元件
[0093]
5容器输入装置
[0094]
6容器输出装置
[0095]
6.1栏杆导向装置
[0096]
7填充元件
[0097]
8填料容器
[0098]
8.1液体空间
[0099]
8.2气体空间
[0100]
9流量计
[0101]
10产品管路
[0102]
11第一环形管道
[0103]
12第二环形管道
[0104]
13填充元件壳体
[0105]
14液体通道
[0106]
15输出开口
[0107]
16液体阀
[0108]
17阀挺杆
[0109]
18阀体
[0110]
19操纵元件
[0111]
20气体管道
[0112]
21气体空间
[0113]
22受控的第三气体路径
[0114]
23控制阀
[0115]
24控制阀
[0116]
25气体管道
[0117]
26受控的第一气体路径
[0118]
27,28气体管道
[0119]
27.1,28.1返回气体开口
[0120]
29,30控制阀
[0121]
31中心定位钟
[0122]
32容器承载件
[0123]
33操纵元件
[0124]
34拉杆
[0125]
35曲线辊轮
[0126]
37惰性气体在冲洗时的流动
[0127]
40第三环形管道
[0128]
41压力控制装置
[0129]
42受控的第二气体路径
[0130]
50传送袋槽
[0131]
51.1第一边缘
[0132]
51.2第二边缘
[0133]
53导向栏杆
[0134]
54传送指
[0135]
60封闭机
[0136]
a处理方向
[0137]
af1第一接触面
[0138]
af2第二接触面
[0139]
afa1第一接触面区段
[0140]
afa2第二接触面区段
[0141]
afa3第三接触面区段
[0142]
afa4第四接触面区段
[0143]
bs容器处理线
[0144]
b转子3的回转方向上
[0145]
fa填充元件轴线
[0146]
fp容器处理位置
[0147]
ma机器轴线
[0148]
sp起始点推出运动
[0149]
u周缘
[0150]
ur传送元件4的回转方向。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1