一种应用巡检机器人的成品油泄漏识别系统及方法与流程
1.本发明涉及成品油泄漏检测技术领域,更具体地说,它涉及一种应用巡检机器人的成品油泄漏识别系统及方法。
背景技术:
2.对于成品油销售企业,管道运输是一种重要的运输手段,被广泛应用。输油场站作为成品油销售终端的重要组成部分,配备了大量的输油管线。同时由于输油场站内的管道多位于地表,受环境及设备老化方面的影响,在管道的法兰连接处以及设备连接处极易发生泄漏。传统的输油场站成品油泄漏的检测方法主要依靠安装固定传感器来实现检测,传感器通过检测空气中油气的含量来实现报警。此类传感器对检测成品油大规模泄漏能起到很好的报警作用,但是对于成品油细微的滴露情况,主要还是依靠人工巡检来检测。
3.随着机器人应用的普及,目前已经有巡检机器人在输油场站代替人工巡检的案例,但主要还是依靠机器人携带固定的传感器来实现检测,不能从源头上对输油站发生泄漏的事故进行防范。
技术实现要素:
4.本发明要解决的技术问题是针对现有技术的上述不足,本发明的目的一是提供一种可以提高检测精度的应用巡检机器人的成品油泄漏识别系统。
5.本发明的目的二是提供一种可以提高检测精度的应用巡检机器人的成品油泄漏识别方法。
6.为了实现上述目的一,本发明提供一种应用巡检机器人的成品油泄漏识别系统,包括巡检机器人、图像采集设备、成品油检测试纸、无线客户端、全向天线、无线基站、上位机,所述图像采集设备、无线客户端、全向天线均设于所述巡检机器人,所述图像采集设备通过线缆连接所述无线客户端,所述无线客户端与所述无线基站或上位机无线通信连接,所述无线基站与上位机网络连接,所述全向天线通过同轴屏蔽电缆连接所述无线客户端的天线接口,所述成品油检测试纸将连接两条输油管路的管路法兰包裹。
7.作为进一步地改进,所述巡检机器人为防爆轮式巡检机器人或飞行机器人。
8.进一步地,所述图像采集设备为云台摄像机或相机或摄像头。
9.进一步地,所述无线客户端与所述无线基站或上位机的无线通信方式为3g/4g/5g、蓝牙、zigbee、wi
‑
fi、nb
‑
iot中的任意一种。
10.为了实现上述目的二,本发明提供一种应用巡检机器人的成品油泄漏识别方法,包括:
11.步骤一.巡检机器人沿输油管路运动,运动到管路法兰处时,图像采集设备获取成品油检测试纸的图像,然后通过无线客户端将所述图像发送到无线基站,所述无线基站再将所述图像发送到上位机;
12.步骤二.所述上位机的视觉软件模块将所述图像转换为hsv颜色模型形式,并分别
读取转换完后的h值、s值和v值;
13.步骤三.若所述h值处于第一范围内或s值处于第二范围内或v值处于第三范围内,则判定所述成品油检测试纸的颜色发生了变化,所述输油管路发生了泄漏;否则所述输油管路未发生了泄漏;
14.步骤四.所述上位机输出检测结果,若所述输油管路发生了泄漏,则所述上位机发出声光报警。
15.作为进一步地改进,在所述步骤一中,所述上位机的机器人控制模块对的所述图像进行处理,并将所述图像保存到所述上位机指定的文件夹内,名称以设备名称+拍摄时间形式命名。
16.进一步地,所述机器人控制模块通过指针的形式将所述图像指引到所述视觉软件模块处,同时规定照片的位置信息。
17.进一步地,所述视觉软件模块通过指针形式将检测结果传递给所述上位机、机器人控制模块。
18.进一步地,所述视觉软件模块为opencv视觉模块。
19.进一步地,所述第一范围为0~10或156~180,所述第二范围为43~255,所述第三范围为43~255。
20.有益效果
21.本发明与现有技术相比,具有的优点为:
22.本发明在巡检过程中,通过视觉识别的方式,对成品油泄漏情况进行监控,并及时进行报警,能更好的代替人工完成输油场站巡检工作,提高了输油管道泄漏检测的准确性和及时性。
附图说明
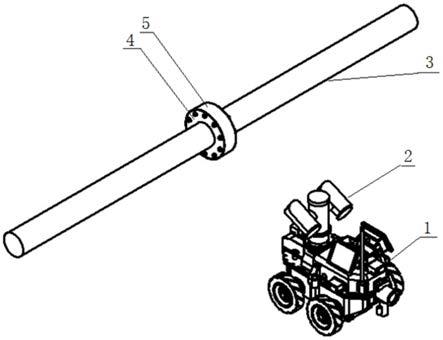
23.图1为本发明的系统工作示意图;
24.图2为本发明的系统组成结构连接示意图。
25.其中:1
‑
巡检机器人、2
‑
图像采集设备、3
‑
输油管路、4
‑
管路法兰、5
‑
成品油检测试纸、6
‑
机器人内部电源、7
‑
无线客户端、8
‑
全向天线、9
‑
无线基站、10
‑
上位机。
具体实施方式
26.下面结合附图中的具体实施例对本发明做进一步的说明。
27.参阅图1、2,一种应用巡检机器人的成品油泄漏识别系统,包括巡检机器人1、图像采集设备2、成品油检测试纸5、无线客户端7、全向天线8、无线基站9、上位机10。图像采集设备2、无线客户端7、全向天线8均设于巡检机器人1。图像采集设备2通过线缆连接无线客户端7,无线客户端7与无线基站9或上位机10无线通信连接,无线基站9与上位机10网络连接,巡检机器人1的机器人内部电源6使用电源电缆分别为无线客户端7和图像采集设备2供电。全向天线8通过同轴屏蔽电缆连接无线客户端7的天线接口,从而提高无线信号传输的距离和稳定性。成品油检测试纸5将连接两条输油管路3的管路法兰4包裹,如果成品油从管路法兰4连接处泄漏出来,与成品油检测试纸5接触后,成品油检测试纸5将变色,如变为红色或其他颜色。
28.在一个实施例中,巡检机器人1为防爆轮式巡检机器人,通过性好,可以适用于不同的地形。
29.在一个实施例中,巡检机器人1为飞行机器人,灵活性高。
30.在一个实施例中,图像采集设备2为云台摄像机,云台摄像机为全方位移动可见光云台摄像机,适应性好。
31.在一个实施例中,图像采集设备2为相机或摄像头。
32.无线客户端7与无线基站9或上位机10的无线通信方式为3g/4g/5g、蓝牙、zigbee、wi
‑
fi、nb
‑
iot中的任意一种。上位机10为电脑或服务器。
33.一种应用巡检机器人的成品油泄漏识别方法,包括:
34.步骤一.巡检机器人1沿输油管路3运动,运动到管路法兰4处时,图像采集设备2对成品油检测试纸5的外貌进行抓拍,获取成品油检测试纸5的图像,然后通过无线客户端7无线传输将图像发送到无线基站9,无线基站9再通过网络将图像发送到上位机10;
35.步骤二.上位机10的视觉软件模块将图像转换为hsv颜色模型形式,并分别读取转换完后的h值、s值和v值;
36.步骤三.若h值处于第一范围内或s值处于第二范围内或v值处于第三范围内,则判定成品油检测试纸5的颜色发生了变化,输油管路3发生了泄漏;否则,判定成品油检测试纸5的颜色未发生了变化,输油管路3未发生了泄漏;
37.步骤四.上位机10输出检测结果,若输油管路3发生了泄漏,则上位机10发出声光报警,以提醒工作人员及时处理。
38.在步骤一中,上位机10的机器人控制模块对的图像进行处理,如去噪或判断图像完整性,处理完后将图像保存到上位机10指定的文件夹内,名称以设备名称+拍摄时间形式命名。
39.机器人控制模块通过指针的形式将图像指引到视觉软件模块处,同时规定照片的位置信息。视觉软件模块通过指针形式将检测结果传递给上位机10、机器人控制模块。
40.优选的,视觉软件模块为opencv视觉模块。第一范围为0~10或156~180,第二范围为43~255,第三范围为43~255。
41.本发明在巡检过程中,通过视觉识别的方式,对成品油泄漏情况进行监控,并及时进行报警,能更好的代替人工完成输油场站巡检工作,提高了输油管道泄漏检测的准确性和及时性。
42.以上仅是本发明的优选实施方式,应当指出对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些都不会影响本发明实施的效果和专利的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1