容器开合盖装置及开合盖方法与流程
1.本发明涉及实验室自动化技术领域,尤其涉及一种容器开合盖装置及开合盖方法。
背景技术:
2.在自动化实验室,大量的自动化工作是对容器进行样品取放操作,样品从容器中取出或放入过程,通过机器人或机械臂完成。具体的过程一般如下,机械臂通过夹爪机构将容器从料盘上抓取后,送至容器夹持位置,由夹持机构将容器夹持固定,然后驱动开合盖机构移至夹持位置,对容器进行开盖,开盖完成后,在夹持位置,进行样品处理,样品处理完成后,再驱动开合盖机构进行合盖操作。合盖完成后,由夹爪机构将合盖的容器移动输出位置。
3.现有的自动化操作过程,要通过两次驱动夹爪机构,两次驱动开合盖机构,才能完成一次样品处理。效率低下,操作时间长,无法满足自动化实现的快速处理的便利性,另外,对活泼化学性质的样品,增加了与空气接触时长的风险,在多次机械臂移动过程中,容易产生定位误差。
技术实现要素:
4.本发明的目的是为了解决上述问题,提供一种容器开合盖装置及开合盖方法,在容器从输入(输出)位至样品处理位的移动过程中,即可完成开合盖操作,大大提高了工作效率,处理能力达到现有方式的三倍以上。
5.本发明采取的技术方案是:一种容器开合盖装置,其特征是,包括设置在竖直支架上的容器盖夹持旋转机构和容器体夹持升降机构,所述容器盖夹持旋转机构包括夹持头,所述容器体夹持升降机构包括抓手,所述抓手伸出至夹持头的下方,使夹持头、抓手之间形成容器体通道,所述抓手用于夹持容器体并升降,所述夹持头用于夹持容器盖并旋转,实现对容器的开合盖操作。
6.进一步,所述竖直支架设置在xy轴移动机构上,所述容器体夹持升降机构经xy轴移动机构位移至容器位置上方后,经抓手抓起容器后进行开合盖操作。
7.进一步,所述容器体夹持升降机构设置在容器盖夹持旋转机构的侧边,所述容器体夹持升降机构的抓手从下方向侧边伸出至容器盖夹持旋转机构的夹持头下方。
8.进一步,所述抓手包括两个对称的夹爪,两个夹爪的相对侧设置防滑垫。
9.进一步,所述竖直支架上设置竖直导轨和齿条,所述容器体夹持升降机构配合设置在所述导轨上,容器体夹持升降机构上设置电机,电机轴上设置齿轮,所述齿轮与齿条啮合使所述容器体夹持升降机构升降。
10.进一步,所述夹持头包括两个对称的弧形夹,两个弧形夹内设置滚花。
11.进一步,所述滚花为上下两层,上层滚花的内径小于下层滚花的内径。
12.进一步,所述夹持头和抓手均为电动爪。
13.一种应用容器开合盖装置的容器开合盖方法,其特征是,包括如下步骤:第一步:xy轴移动机构将竖直支架及其上的容器盖夹持旋转机构和容器体夹持升降机构移动至取容器位置;第二步:容器体夹持升降机构下降,抓手抓取容器;第三步:容器体夹持升降机构驱动容器上升,容器盖被送入容器盖夹持旋转机构的夹持头内;第四步:夹持头夹紧容器盖,容器盖夹持旋转机构驱动夹持头逆时针旋转,同时,容器体夹持升降机构驱动容器下降开盖螺距长度,完成开盖;第五步:xy轴移动机构移动至样品处理位置;第六步:容器体夹持升降机构下降,抓手打开,放下容器后退出,进行样品处理;第七步:容器体夹持升降机构下降,抓手抓取容器;第八步:容器体夹持升降机构驱动容器上升,容器的顶部与容器盖夹持旋转机构的夹持头内的容器盖配合;第九步:容器盖夹持旋转机构驱动夹持头顺时针旋转,同时,容器体夹持升降机构驱动容器上升开盖螺距长度,完成合盖,夹持头打开;第十步:xy轴移动机构移动至样品回复位置;第十一步:容器体夹持升降机构下降,抓手打开,放下容器后退出,完成一次样品处理。
14.进一步,所述第四步和第五步是同时完成的;所述第九步和第十步也是同时完成的。
15.本发明的有益效果是:(1)容器在移动过程中完成开合盖操作,节省时间,提高效率;(2)将开合盖机构和夹持机构合二为一,减少了两套机构的驱动部件,节省空间,大大降低成本;(3)集成化设计,可安装于不同的实验室处理模块上。
附图说明
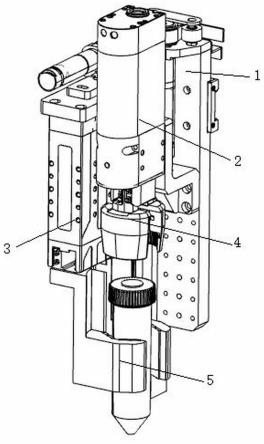
16.附图1是本发明的一个视角的结构示意图;附图2是本发明的另一个视角的结构示意图;附图3是本发明的局部放大示意图;附图4是本发明工作过程位置示意图。
17.附图中的标号分别为:1.竖直支架;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2.容器盖夹持旋转机构;3.容器体夹持升降机构;
ꢀꢀꢀꢀꢀꢀ
4.夹持头;5.抓手;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6.导轨;7.齿条;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8.电机;9.齿轮;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10.夹爪;11.防滑垫;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12.弧形夹;13.上层滚花;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14.下层滚花;
15.xy轴移动机构。
具体实施方式
18.下面结合附图对本发明容器开合盖装置及开合盖方法的具体实施方式作详细说明。
19.参见附图1,本发明的容器开合盖装置,包括设置在竖直支架1上的容器盖夹持旋转机构2和容器体夹持升降机构3,容器盖夹持旋转机构2包括夹持头4,容器体夹持升降机构3包括抓手5,抓手5伸出至夹持头4的下方,使夹持头4、抓手5之间形成容器体通道,抓手5用于夹持容器体并升降,夹持头4用于夹持容器盖并旋转,实现对容器的开合盖操作。
20.参见附图2,容器体夹持升降机构3设置在容器盖夹持旋转机构2的侧边,容器体夹持升降机构3的抓手5从下方向侧边伸出至容器盖夹持旋转机构2的夹持头4下方。
21.竖直支架1上设置竖直导轨6和齿条7,容器体夹持升降机构3配合设置在导轨6上,容器体夹持升降机构3上设置电机8,电机轴上设置齿轮9,齿轮9与齿条7啮合使容器体夹持升降机构3升降。
22.参见附图3,容器体夹持升降机构3的抓手5包括两个对称的夹爪10,两个夹爪10的相对侧设置防滑垫11。两个夹爪10夹紧时,可适合试管、采样瓶、离心管等不同管径的容器。
23.容器盖夹持旋转机构2的夹持头4包括两个对称的弧形夹12,两个弧形夹12内设置滚花,滚花的纹路可与容器盖的纹路相匹配,以达到更好的夹持效果。滚花为上下两层,上层滚花13的内径小于下层滚花14的内径,两层滚花可适用于不同直径的容器盖。
24.夹持头4和抓手5均选用电动爪,电动爪尺寸小,动力大,接线简单。
25.参见附图4,工作时,竖直支架1设置在xy轴移动机构15上,容器体夹持升降机构3经xy轴移动机构15位移至容器位置上方后,经抓手5抓起容器后进行开合盖操作。xy轴移动机构15为x轴方向的滑轨移动容器开合盖装置,y轴方向的滑轨移动x轴一起移动,再结合抓手5的垂直升降,实现六个自由度的移动。
26.本发明进行样品输和输出及开合盖的具体步骤如下:第一步:xy轴移动机构15将竖直支架1及其上的容器盖夹持旋转机构2和容器体夹持升降机构3移动至取容器位置;第二步:容器体夹持升降机构3下降,抓手5抓取容器;第三步:容器体夹持升降机构3驱动容器上升,容器盖被送入容器盖夹持旋转机构2的夹持头4内;第四步:夹持头4夹紧容器盖,容器盖夹持旋转机构2驱动夹持头4逆时针旋转,同时,容器体夹持升降机构3驱动容器下降开盖螺距长度,完成开盖;第五步:xy轴移动机构15移动至样品处理位置;第六步:容器体夹持升降机构3下降,抓手5打开,放下容器后退出,进行样品处理;第七步:容器体夹持升降机构3下降,抓手5抓取容器;第八步:容器体夹持升降机构3驱动容器上升,容器的顶部与容器盖夹持旋转机构2的夹持头4内的容器盖配合;第九步:容器盖夹持旋转机构2驱动夹持头4顺时针旋转,同时,容器体夹持升降机构3驱动容器上升开盖螺距长度,完成合盖,夹持头4打开;
第十步:xy轴移动机构15移动至样品回复位置;第十一步:容器体夹持升降机构3下降,抓手5打开,放下容器后退出,完成一次样品处理。
27.由于第四步和第五步是同时完成的,第九步和第十步也是同时完成的,就大大地缩短了实际自动化操作时长。
28.以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1