用于样本管操作装置的控制方法及存储介质与流程
本技术涉及医疗仪器,具体涉及一种用于样本管操作装置的控制方法及存储介质。
背景技术:
1、生化样本检测过程中,样本管的开盖效率和安全性是检测过程中的关键环节,传统的样本管开盖环节由检验人员采用手动开盖,当存在大批量待检测样本管时,手动开盖的劳动强度大,工作效率低。因此,市面上目前出现了多种开盖装置,主要采用机械结构进行样本管管盖的开关,代替人工开关盖,在降低检验人员劳动强度的同时,能提高试管开关盖的效率和安全性。
2、在现有技术中,市面上试管种类很多,如果靠常用的位置反馈来分析不同样品管是否被夹紧、以及开盖和合盖是否成功,则需要根据试管种类设置和保存繁杂的试管特征的相关参数。而同批次同型号的试管也可能由于工艺误差,其管径可能会不完全相同,仅靠同一试管的管径特征参数来进行位置反馈,无法保证试管夹紧的可靠性,可能造成试管空夹或者夹紧不闹中途掉落。
技术实现思路
1、本技术实施例的目的是提供一种用于样本管操作装置的控制方法、样本管操作装置、存储介质及控制器。
2、为了实现上述目的,本技术第一方面提供一种用于样本管操作装置的控制方法,样本管操作装置包括多个操作机构和多个电机模块,每个操作机构通过对应的电机模块驱动,在样本管操作装置对样本管进行开合盖和转移过程中包括多个子流程,每个子流程对应至少一个目标操作机构,针对任意一个子流程,控制方法包括:
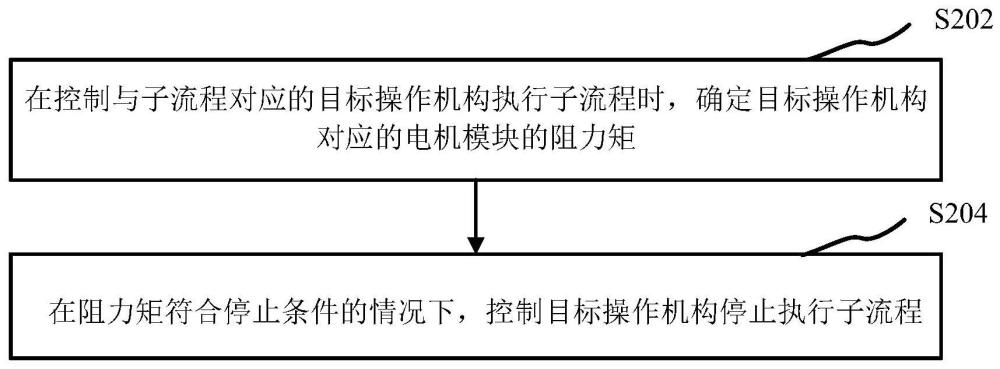
3、在控制与子流程对应的目标操作机构执行子流程时,确定目标操作机构对应的电机模块的阻力矩;
4、在阻力矩符合停止条件的情况下,控制目标操作机构停止执行子流程。
5、在本技术的实施例中,多个操作机构包括:第一夹持机构,第一夹持机构用于夹持样本管的管盖;第二夹持机构,安装于固定装置,用于夹持样本管的管身;转移机构,与第一夹持机构连接,用于带动第一夹持机构在水平方向或竖直方向移动。
6、在本技术的实施例中,在子流程为第一子流程的情况下,目标操作机构为转移机构和第一夹持机构,其中,第一子流程是指将样本管从样本管载架转移至固定装置的操作流程,控制方法还包括:在满足以下任意一个条件的情况下,确定阻力矩符合停止条件:条件一、在第一夹持机构的抓夹之间的第一间距减小至第一间距阈值的情况下,第一夹持机构的第一电机模块的第一阻力矩小于第一阻力矩阈值;条件二、在第二夹持机构的抓夹之间的第二间距减小至第二间距阈值的情况下,第二夹持机构的第二电机模块的第二阻力矩小于第二阻力矩阈值。
7、在本技术的实施例中,多个操作机构还包括与第一夹持机构连接的旋转机构,用于带动第一夹持机构旋转,在子流程是第二子流程的情况下,目标操作机构为转移机构、第一夹持机构、第二夹持机构、旋转机构,其中,第二子流程是指在固定装置对样本管进行开合盖,控制方法还包括:在满足以下任意一个条件的情况下,确定阻力矩符合停止条件:条件三、第一夹持机构的第一电机模块的第一阻力矩小于第一阻力矩阈值;条件四、第二夹持机构的第二电机模块的第二阻力矩小于第二阻力矩阈值。
8、在本技术的实施例中,控制方法还包括:在第一阻力矩和/或第二阻力矩不符合停止条件的情况下,分别控制第一电机模块的转矩值保持在第一阻力矩阈值和/或第二电机模块的转矩值保持在第二阻力矩阈值,以执行第一子流程或第二子流程。
9、在本技术的实施例中,控制方法还包括:在第一阻力矩符合停止条件的情况下,控制第一夹持机构的抓夹打开,以增大第一间距;在第一间距增大至第三间距阈值的情况下,控制第一夹持机构再次夹持管盖,其中,第三间距阈值大于第一间距阈值;在第二阻力矩符合停止条件的情况下,控制第二夹持机构的抓夹打开,以增大第二间距;在第二间距增加至第四间距阈值的情况下,控制第二夹持机构再次夹持管身,其中,第四间距阈值大于第二间距阈值。
10、在本技术的实施例中,在第二间距增加至第四间距阈值的情况下,控制第二夹持机构再次夹持管身还包括:在第二子流程为开盖流程,且在第二间距增大到第四间距阈值的情况下,控制转移机构运行,以使第一夹持机构在竖直方向向下移动,使得样本管回到固定装置;控制第二夹持机构再次夹持管身。
11、在本技术的实施例中,控制方法还包括:在第二夹持机构夹持住管身的情况下,更新旋转机构的第三电机模块的转矩值;控制旋转机构根据更新后的转矩值进行旋转。
12、在本技术的实施例中,第二子流程包括开盖流程和合盖流程,控制方法还包括:在满足以下任意一个条件的情况下,确定阻力矩符合停止条件:条件五、针对开盖流程,在旋转机构的旋转圈数旋转至旋转圈数阈值的过程中,存在旋转机构的第三电机模块的第三阻力矩大于或等于第三阻力矩阈值。条件六、针对合盖流程,在旋转机构的旋转圈数旋转至旋转圈数阈值的情况下,第三阻力矩小于第四阻力矩阈值。
13、在本技术的实施例中,控制方法还包括:针对合盖流程,在旋转圈数旋转至旋转圈数阈值的过程中,第三阻力矩大于或等于第四阻力矩阈值的情况下,控制第三电机模块停止运行,以使旋转机构停止旋转。
14、在本技术的实施例中,在子流程为第三子流程的情况下,目标操作机构为转移机构、第一夹持机构、第二夹持机构,其中,第三子流程是指将样本管从固定装置转移至样本管载架,控制方法还包括:在满足以下任意一个条件的情况下,确定阻力矩符合停止条件:条件七、在样本管未转移至样本管载架的情况下,第一夹持机构对应的第一电极模块的第一阻力矩小于第一阻力矩阈值;条件八、在第一夹持机构的抓夹之间的第一间距增大至第三间距阈值的过程中,第一阻力矩大于或等于第五阻力矩阈值;条件九、在第二夹持机构的抓夹之间的第二间距增大至第四间距阈值的过程中,第二夹持机构的第二电机模块的第二阻力矩大于或等于第六阻力矩阈值。
15、本技术第二方面提供一种控制器,被配置成执行上述的用于样本管操作装置的控制方法。
16、本技术第三方面提供一种样本管操作装置,包括:
17、多个电机模块,分别用于驱动对应的多个操作机构;
18、多个操作机构,用于执行对样本管进行开合盖和转移过程中的任意一个子流程;
19、控制器,被配置成执行上述的用于样本管操作装置的控制方法。
20、在本技术的实施例中,多个操作机构包括:第一夹持机构,第一夹持机构用于夹持样本管的管盖;第二夹持机构,安装于固定装置,用于夹持样本管的管身;转移机构,与第一夹持机构连接,用于带动第一夹持机构在水平方向或竖直方向移动;旋转机构,与第一夹持机构连接,用于带动第一夹持机构旋转。
21、本技术第四方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令在被控制器执行时使得所述控制器被配置成执行上述的用于样本管操作装置的控制方法。
22、通过上述技术方案用于样本管操作装置的控制方法及存储介质,样本管操作装置包括多个操作机构和多个电机模块,每个操作机构通过对应的电机模块驱动,在样本管操作装置对样本管进行开合盖和转移过程中包括多个子流程,每个子流程对应至少一个目标操作机构,针对任意一个子流程,控制方法包括:在控制与子流程对应的目标操作机构执行子流程时,确定目标操作机构对应的电机模块的阻力矩;在阻力矩符合停止条件的情况下,控制目标操作机构停止执行子流程。通过阻力矩检测来控制执行样本管开合盖和转移操作,可以应用于不同口径和不同型号的样本管,无需根据不同的样本设定繁杂的参数,并且可以提高流程执行的效率和可靠性。
23、本技术实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!