一种灌装瓶自动化分类加工产线及方法
本发明涉及灌装瓶分类别自动化加工,尤其涉及一种灌装瓶自动化分类加工产线及方法。
背景技术:
1、目前我国制造业中的中小企业急需进行转型升级发展,其中自动化、智能化和数字化成为重点,许多以灌装瓶为包装产品的企业,开始研发或购买并选择工业机器人来进行作业,追求最大程度上提升生产效率并提升产品质量,获得最佳的经济效益。
2、传统复杂工业机器人提高生产效率的同时,其所出现的问题愈发明显。一是传统复杂机器人的部署成本过高,对于部分灌装瓶中小企业单独的机器人一般无法直接用于工厂的生产线上,还需要很多外围设备的支持,不仅需要巨大的投资,还涉及到停产改造。二是中小企业的产品一般以小批量,定制化,短周期为特征,投资回报率无法得到满足。三是由于对工业机器人的安全性需求,传统复杂机器人需要用围栏把人与机器分隔开来,工人作业区域受限较大。
3、相较于传统复杂机器人,协作机器人将不再需要护栏将人与机器分开,其将在生产线上与工人共同作业,由人类负责对柔性、触觉、灵活性要求比较高的工序,机器人则利用其快速、准确的特点来负责重复性的工作。基于协作机器人的安全性和可替换性,人工作业将变得增加人性化、智能化,产业也更加的灵活。更好的实现中小企业小批量、定制化的生产形式。
4、灌装瓶产品因为其诸多优异的理化性质而被广泛应用,尤其是一些软体灌装瓶产品,例如硅油和其衍生物,不仅作为航空、尖端技术、军事技术部门的特种材料使用,而且也用于国民经济的各部门,例如建筑、电子电气、纺织、汽车、机械、皮革造纸、化工轻工、金属和油漆、医药医疗等领域均有应用;我们日常使用的各类护肤品、药片药膏以及洗发露、沐浴露等,也可以采用软体灌装瓶。
5、目前一些软体灌装产品生产和加工工厂,企业产线自动化水平差,需要对产线进行升级改造,需要一种能实现高度自动化作业,又能实现对产品液位检测和贴标检测的产线,使产线能实现自动识别,自动分类,区分良次品,自动装箱,智能储存,人工封装及整理,后台监控等功能,提高生产效率,减少了人工繁重的操作,降低了人力成本,同时在一定程度上保证员工的健康安全。
技术实现思路
1、本发明的目的在于提供一种灌装瓶自动化分类加工产线及方法,对灌装瓶产品生产全过程进行自动化控制,提高灌装瓶产线自动化水平,实现对产品液位检测和贴标检测,提高产线生产效率。
2、本发明的目的可以通过以下技术方案实现:一种灌装瓶自动化分类加工方法,包括步骤:
3、s1、沿传送带输送至少两类灌装瓶,灌装瓶分类进行灌装和轧盖,获取灌封产品;
4、s2、对灌封产品合流,对合流后的灌封产品进行液位检测,将不合格产品移出产线,并将合格产品进行分类传送;
5、s3、对分类传送的灌封产品进行粘贴及固定标签,获取贴标产品;
6、s4、对贴标产品合流,对合流后的贴标产品进行贴标检测;
7、s5、将不合格产品移出产线,将合格产品分类储存至货架区域。
8、可选地,所述s2中对灌封产品合流,对合流后的灌封产品进行液位检测,将不合格产品移出产线,并将合格产品进行分类传送,包括步骤:
9、s21、对灌封产品合流,使灌装瓶与瓶之间等间距分开;
10、s22、利用液位检测装置对合流后的灌封产品进行液位检测,获取不合格灌封产品信息,获取合格灌封产品分类别信息;
11、s23、依据不合格灌封产品信息,利用移出组件将不合格灌封产品移出传送带;
12、s24、依据合格灌封产品分类别信息,利用达明机器人对合格产品进行分类转移传送。
13、可选地,所述s22中利用液位检测装置对合流后的灌封产品进行液位检测,包括步骤:
14、s221、利用红外传感器检测到灌封产品到达检测区域后,传送带停止;
15、s222、利用ccd工业相机采集灌封产品图像;
16、s223、对图像进行灰度化和滤波处理,增强图像;
17、s224、利用log边缘检测算子,获取图像中灌封产品液位边缘;
18、s225、依据液位边缘确定灌封产品液位高度,完成液位检测。
19、可选地,所述s3中对分类传送的灌封产品进行粘贴及固定标签,获取贴标产品,包括步骤:
20、s31、依据产品位置信息,调整瓶与瓶间距,瓶与瓶分隔成合适间距;
21、s32、利用红外传感器检测传送带灌封产品位置信息,并发送到plc控制器;
22、s33、在水平方向和竖直方向定位产品位置;
23、s34、在瓶身滚压标签,使标签与瓶身紧密贴合。
24、可选地,所述s4中对贴标产品合流,对合流后的贴标产品进行贴标检测,包括步骤:
25、s41、对灌封产品合流,使灌装瓶与瓶之间等间距分开;
26、s42、利用标签检测装置对合流后的贴标产品进行贴标检测,获取不合格贴标产品信息,获取合格贴标产品分类别信息。
27、可选地,所述s42中利用标签检测装置对合流后的贴标产品进行贴标检测,包括步骤:
28、s421、利用红外传感器检测到灌封产品到达检测区域后,传送带停止;
29、s422、利用ccd面阵相机采集贴标产品图像;
30、s423、对图像进行灰度化和滤波处理,增强图像;
31、s424、利用canny边缘检测算子,获取图像中贴标产品标签边缘;
32、s425、依据标签边缘确定贴标产品标签位置,完成贴标检测。
33、可选地,所述s5中将不合格产品移出产线,将合格产品分类储存至货架区域,包括步骤:
34、s51、按产品类型,利用输送机传送产品箱至预定位置;
35、s52、依据不合格贴标产品信息,利用移出组件将不合格贴标产品移出传送带至收集箱;
36、s53、依据合格贴标产品分类别信息,利用达明机器人对合格产品进行分类转移至产品箱;
37、s54、输送机传送满容量产品箱至堆垛机;
38、s55、堆垛机储存满容量产品箱至立体货架。
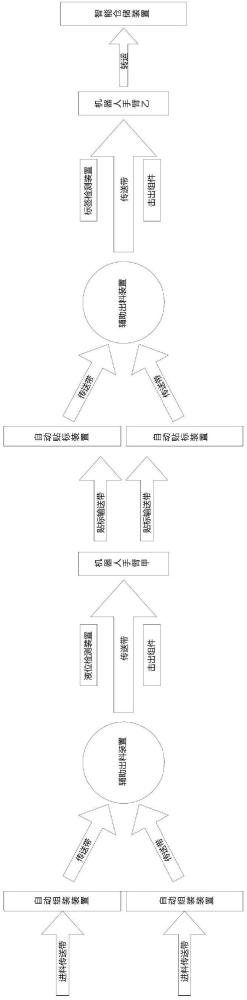
39、一种灌装瓶自动化分类加工产线,包括:
40、自动组装装置,对至少两类灌装瓶分类进行灌装和轧盖,获取灌封产品;
41、液位检测装置,利用机器视觉技术,对合流的灌封产品液面检测,将合格灌封产品分类转移至下道工序,不合格灌封产品移出产线;
42、自动贴标装置,对分类后合格灌封产品粘贴及固定标签,获取贴标产品;
43、标签检测装置,对合流贴标产品检测标签位置缺陷,转移合格贴标产品至下道工序,
44、智能仓储装置,将不合格贴标产品移出产线,对合格贴标产品分类,并储存至货架区域;
45、其中,各装置之间设置有传送带,使产品依工序流转,利用辅助出料装置对合流产品输送间距调整,各装置均连接至plc控制器,实现全过程工艺自动化控制。
46、可选地,所述液位检测装置包括:
47、红外传感器,感应产品进入检测区域,并将感应数据发送给plc控制器;
48、视觉检测组件,设置在检测区域一侧面,包括led灯、相机支架、ccd工业相机和图像处理计算机,ccd工业相机对正检测区域安装在相机支架上,且连接plc控制器和图像处理计算机,ccd工业相机在led灯辅助下采集产品图像数据,并发送采集数据到图像处理计算机。
49、移出组件,设置在检测区域与视觉检测组件相对的另一侧面,包括气缸和击出板,所述气缸依据plc控制器信号利用击出板击出生产线产品;
50、达明机器人甲,依据plc控制器信号分类转移合格产品至不同传送带。
51、可选地,所述自动贴标装置包括:
52、分瓶组件,调整瓶与瓶间距,瓶与瓶分隔成合适间距;
53、红外传感器:感应产品进入贴标区域;
54、整形组件,在水平方向上固定产品,产品在贴标时不易倾倒;
55、压带组件,在垂直方向上固定产品,产品在贴标时不易倾倒;
56、标签组件,用于输送标签,标签与底纸分离,标签底纸回收;
57、压标组件:将标签贴于瓶身,对标签进行滚压,使标签与瓶紧密结合。
58、其中,红外传感器将感应数据发送给plc控制器,plc控制器控制整形组件、压带组件、标签组件和压标组件协同动作,完成产品贴标。
59、本发明的有益效果:
60、1、本发明产线及生产方法涵盖了产品组装、液位检测、自动贴标、标签检测和智能仓储多个方面,可以对产品生产全过程进行自动化控制,产线自动化水平高,功能齐全,适用范围广,改造成本低,方便中小企业自动化产线升级改造。
61、2、本发明产线及生产方法采用达明协作机器人相较于传统机器人,达明协作机器人将不再需要护栏将人与机器分开,其将在生产线上与工人共同作业,产业工人负责对柔性、触觉、灵活性要求比较高的工序,机器人则利用其快速、准确的特点来负责重复性的工作,基于协作机器人的安全性和可替换性,人工作业将变得增加人性化、智能化,产业也更加的灵活,可以更好的实现中小企业小批量、定制化的生产形式。
62、3、本发明产线及生产方法中,液位检测和标签检测采用视频识别技术,利用log边缘检测算子结合数字形态学操作得到清晰的产品液位边缘图像,最后得出准确的液位高度,整个过程可以在无外界辅助测量设备的情况下完成产品液位检测,获取较高的精度。基于边缘检测算法canny边缘检测算子进行边缘检测,再通过图像分割提取轮廓特征,然后根据图像矩算法进行标签位置缺陷的检测;识别精度高,速度快,操作简单快捷。
63、4、本发明产线布局紧凑,对多类别产品产线进行集中,多个产线的产品进行合流,可以实现产品在同一传送带上进行质量检测,对原有单产线企业升级改造时,改动变化小,设备配置量少,降低投入成本和运行成本。
- 还没有人留言评论。精彩留言会获得点赞!