评估重叠目标的方法与流程
评估重叠目标的方法
1.本发明涉及一种用于评估雷达频谱中的重叠目标的方法。此外,本发明涉及雷达系统、计算机程序和计算机可读介质。
2.汽车雷达传感器由于其能够监视车辆周围环境以避免潜在危险,因此在高级驾驶员辅助系统(adas)中越来越受到关注。由于二维(2
‑
d)有限傅里叶变换(fft),目标参数(即距离和相对径向速度)可以被确定为距离多普勒(rd)频谱中的局部最大值(峰),而无需大量计算工作。但是,由于对雷达传感器中嵌入式系统的可用带宽和存储器大小的约束,基于傅立叶的估计无法提供任意的精细距离和多普勒分辨率。rd频谱中的每个峰均被假设为单点目标。而在许多关键用例中,当共享相似的距离和相对速度的目标在rd频谱中彼此部分重叠时,可能会违反这种假设。为了克服这些约束,在出版物f.engels等人,”advances in automotive radar:a framework on computationally efficient high
‑
resolution frequency estimation,”ieee signal processing magazine,vol.34,no.2,pp.36
‑
46,mar.201中已提到参数化高分辨率算法。但是,这要求先验地知道源(即,频谱中的目标)的数量。
3.出版物t.fei等人,”a novel target separation algorithm applied to the two dimensional spectrum for fmcw automotive radar systems”,ieee int.conf.microwaves,antennas,comms.and elec.systems,2017年11月公开了可以用于提高分辨率的改进的矩阵束方法,其中通过对奇异值进行阈值处理将输入数据矩阵的优势奇异值的数量作为对源的数量的估计。
4.此外,在应用高分辨率算法之前,使用一维(1
‑
d)模型阶数选择方法来估计源的数量。但是,那些1
‑
d mos方法是为1
‑
d指数信号的叠加而设计的,并不适用于2
‑
d情况。
5.因此,不存在对于在2
‑
d情况下应用参数化高分辨率算法将必要的能够估计2
‑
d频谱中的源的数量的可靠解决方案。
6.本发明的目的是至少部分地避免前述的缺点。具体而言,本发明的目的是提出一种用于估计二维雷达频谱中重叠目标的数量的可靠的解决方案。
7.通过具有权利要求1的特征的方法和具有权利要求8的特征的雷达系统、具有权利要求9的特征的计算机程序以及具有权利要求10的特征的计算机可读介质来解决上述问题。本发明的特征和细节由从属权利要求、说明书和相应的附图得出。关于本发明的方法讨论的特征和细节也与关于本发明的雷达系统和/或计算机程序和/或计算机可读介质讨论的特征和细节相关,和/或反之亦然。
8.该问题具体而言通过一种用于评估二维雷达频谱中的重叠目标(源)的方法来解决,其中执行以下步骤,特别地一个接一个地执行或以任何顺序执行,其中单个步骤也可以重复执行:
9.‑
提供二维雷达频谱,
10.‑
从频谱中选择至少一个关注区域作为输入信号,其中优选地关注区域小于整个雷达频谱(仅是整个雷达频谱的一部分),特别是具有预定大小,
11.‑
执行输入信号的评估以确定关于重叠目标的信息,优选地确定在关注区域中重
and matrix pencil”,ieee trans.signal processing,vol 40,no.9,pp.2267
‑
2280,1992年9月相比):
[0022][0023]
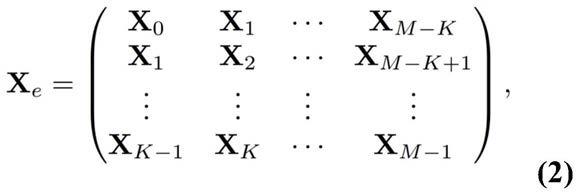
其中每个块是l
×
(n
‑
l+1)hankel矩阵,并且它被定义为:
[0024][0025]
将第一(1)等式应用于第三(3)等式,x
m
可以被分解成:
[0026]
a=diag(a1,a2,
…
,a
i
),y
d
=diag(y1,y2,
…
,y
i
),
ꢀꢀꢀꢀ
(5)
[0027]
z
l
的第e行和第f列中的元素被给定为:
[0028][0029]
z
r
的第p行和第q列中的元素被给定为:
[0030][0031]
然后,将等式(4)应用于等式(2),x
e
被分解成:
[0032]
x
e
=e
l
ae
r
,
ꢀꢀꢀꢀ
(8)
[0033]
其中
[0034][0035][0036]
然后,将svd导入x
e
,结果为:
[0037][0038]
其中和是奇异向量矩阵,并且包含x
e
的i个主要分量。
[0039]
和包含(i
max
‑
i)个非主要分量。
[0040]
包含i个非零的奇异值σ1,σ2,
…
,σ
i
,并且在无噪声的情况下,∑
n
中的其余(i
max
‑
i)个奇异值σ
i+1
,σ
i+2
,
…
,等于零。如上述出版物y.hua,“estimating two
‑
dimensional frequencies by matrix enhancement and matrix pencil”中所示,u
i
跨越与e
l
列向量相同的信号子空间。因此,存在i
×
i的非奇异矩阵t,使得
[0041]
u
i
=e
l
t.
ꢀꢀꢀꢀꢀꢀ
(12)
[0042]
使用等式(9)和(12),它被定义为
[0043][0044]
其中上标
↓
和
↑
分别表示删除矩阵的最后l行和前l行。然后,u
↓
和u
↑
具有以下关系:
[0045]
u
↑
=u
↓
q,其中q=t
‑1y
d
t
ꢀꢀꢀꢀꢀ
(14)
[0046]
在下文中,将矩阵和分别定义为u
↓
和u
↑
的前i列向量。如果i≠i,那么存在非零残差e1(i),其被定义为
[0047]
并且表示伪逆。
[0048]
因此,在噪声情况下,2
‑
d ester估计器预测模型阶数,这将产生最小残差。其可以被推导为:
[0049][0050]
其中并且
[0051]
对于2
‑
d samos,形成(kl
‑
l)
×
2i矩阵并假设kl
‑
l≥2i。在将svd应用于之后,它遵循其中并且γ
i
=diag{γ1,γ2,
…
,γ
2i
}包含的奇异值。2
‑
d samos估计器被构建为:
[0052][0053]
其中并且γ
k
是的第k奇异值,并且
[0054]
基于上述考虑,可以例如通过以下方式实现两种mos方法。如上所述,仅通过示例给出方法的这种具体实现。作为根据本发明的方法的一部分(评估步骤),以下步骤可以具体而言一个接一个地执行。首先,可以通过以下步骤执行第一处理部分:
[0055]
‑
将输入信号(特别是输入雷达数据)布置成hankel块矩阵(x
e
),
[0056]
‑
将奇异值分解(svd)应用于hankel块矩阵,以获得hankel块矩阵(x
e
)的奇异向量矩阵(u),
[0057]
‑
通过删除u的前l行获得u
↑
,
[0058]
‑
通过删除u的后l行获得u
↓
,
int.conf.acoust.,speech signal processing,vol ii,pp.1025
‑
1028,2004年7月中描述。
[0078]
此外,可以想到的是,所确定的关于重叠目标的信息是重叠目标的估计(定量)数量,并且优选地,在执行评估的步骤之后,执行以下步骤:
[0079]
‑
使用估计的重叠目标数量和输入信号来执行(特别是参数化)高分辨率算法,以估计重叠目标的至少一个参数,特别是重叠目标(中的每一个)的距离和/或相对径向速度和/或复振幅。
[0080]
高分辨率算法可以具体而言基于以下之一:2
‑
d多信号分类(music)、经由旋转不变技术的2
‑
d参数估计(esprit)、矩阵增强和矩阵束(memp)方法。这些能够非常可靠地估计重叠目标的距离、相对径向速度和复振幅(相位)。
[0081]
根据本发明,有可能的是(例如,在提供步骤之后和在选择步骤之前)至少执行以下步骤:
[0082]
‑
检测所提供的频谱中的峰(即,至少一个峰),特别是通过峰检测方法,
[0083]
其中选择步骤可以优选地至少包括以下步骤:
[0084]
‑
取决于至少一个检测到的峰来选择至少一个关注区域,其中特别地,在(包括)检测到的峰中的一个不同的检测到的峰周围选择至少一个关注区域中的每一个,每一个提供一个输入信号,
[0085]
其中对于所提供的至少一个输入信号中的每一个,执行评估以确定关于至少一个输入信号中的每个输入信号的重叠目标的信息,其中特别地,一个相应输入信号的重叠目标对应于该输入信号的一个峰。这可能会产生这样的影响,即分析来自整个2d频谱的仅部分频率信号以估计重叠目标的数量。这可以减少用于评估的计算量。但是,替代地,关注区域也可以等于所提供的整个频谱。
[0086]
根据本发明的另一方面,可能的是为了向至少一个输入信号中的每一个提供二维频谱处理,具体而言,可以向至少一个关注区域中的每一个应用变换,优选地应用二维有限傅立叶逆变换,以确定至少一个相应的经变换的关注区域。由于2
‑
d mos方法的输入信号在时域中,因此这可能是必需的。
[0087]
具体而言,可以提供的是,在针对至少一个相应的经变换的关注区域中的每一个的二维频谱处理之后,执行窗口化补偿,以确定至少一个输入信号中的每一个输入信号。当2
‑
d mos方法的信号模型中未包含窗口函数时,应补偿窗口化效应。因此,该步骤可以提高估计准确度。可以通过划分对应的使用的窗口函数来补偿窗口化效应。
[0088]
可能可以的是评估包括根据输入信号确定hankel块矩阵和/或确定hankel块矩阵的奇异值分解。这特别地允许可靠地估计目标的数量。
[0089]
本发明还涉及优选地类似于客车和/或自动驾驶汽车的车辆的一种雷达系统,特别是fmcw雷达系统,用于评估二维雷达频谱中的重叠目标,包括适于执行以下步骤(具体而言对应于根据本发明的方法)的评估单元:
[0090]
‑
提供二维雷达频谱,
[0091]
‑
从频谱中选择至少一个关注区域作为输入信号,
[0092]
‑
执行输入信号的评估以确定关于重叠目标的信息,其中评估特定于模型阶数选择方法。
[0093]
因此,根据本发明的雷达系统可以提供与针对根据本发明的方法所描述的那些优点相同的优点。此外,根据本发明的雷达系统可以适于通过根据本发明的方法来操作。
[0094]
本发明还涉及一种计算机程序,特别是计算机程序产品,其包括指令,当该指令由计算机执行时,使计算机执行根据本发明的方法的步骤。
[0095]
此外,本发明涉及一种其上存储有根据本发明的计算机程序的计算机可读介质。该计算机可读介质可以具体而言被实现为硬盘驱动器或闪存或可下载的软件。
[0096]
因此,根据本发明的计算机程序和计算机可读介质可以提供与针对根据本发明的方法所描述的优点相同的优点。此外,根据本发明的计算机程序和计算机可读介质可以适合于提供根据本发明的方法。
[0097]
在下文中,基于支持性附图描述了本发明的优选实施例。因此,权利要求书中和说明书中描述的特征可以各自单独或以每个组合是本发明所必不可少的。具有相同功能和动作模式的元件被分配相同的附图标记。示意图如下:
[0098]
图1是根据本发明的方法和根据本发明的雷达系统的示意性可视图。
[0099]
图2是根据本发明的方法的另一个示意性可视图,
[0100]
图3是根据本发明的方法的另一个示意性可视图。
[0101]
图1示出了用于可视化根据本发明的方法的雷达系统1。系统1可以包括评估单元2,该评估单元2可以被实施为计算机2或处理器2等。此外,系统1的数据存储单元3可以被设置为具体而言集成到评估单元2中。数据存储单元3可以被实施为根据本发明的计算机可读介质,使得其上存储根据本发明的计算机程序。这允许评估单元2从数据存储单元3读取计算机程序,以执行计算机程序并且从而执行根据本发明的方法。因此,评估单元2可以连接到雷达系统1的另一个部件,如模数转换器或系统1的另一个处理器,以接收特定于检测雷达系统1的信号。此后,可以对该信号进行处理以提供二维雷达频谱100。
[0102]
参考图2和图3,进一步图示了根据本发明的方法。根据本发明的方法可以用于评估二维雷达频谱100中的重叠目标110。因此,首先可以执行提供10二维雷达频谱100。下面示例性地更详细地进行描述。
[0103]
雷达系统1可以具体而言具有至少一个传感器(例如,24ghz或77ghz),其利用快速线性调频序列的概念作为发射信号调制方案来确定目标的参数,即,距离、相对速度和角度。可以提供的是,在每个测量周期中,该调制方案在持续时间t1内依次发射n个频率线性调频,然后线性调频的持续时间为t1/n。线性调频的当前发射频率在发射带宽b内线性变化(线性频率调制)。接收信号数据的处理可以在t2‑
t1的时间段内在t1之后相邻执行,使得整个测量周期的持续时间到达t2。
[0104]
此外,雷达系统1可以有利地提供至少一个发射天线和多达三个接收天线,正交解调器通过它们应用于至少一个接收天线。接收天线可以在x方向上以距离d
r
等距地布置。如果发射信号到达目标,它将被反向散射到雷达系统1的雷达传感器。该反射的信号可以首先在接收器处被解调到基带中,随后由模数转换器(adc)采样。直到时间点t1,所有接收天线的这些数据被存储在例如3个块中,每个块都是m乘n(每个线性调频m个样本,以及n个线性调频)的adc数据矩阵。正交解调器获得的adc数据矩阵包含复数值数据。此后,这些2d基带adc信号通过2d离散傅里叶变换被变换到2d频域。所得信号形成二维频谱100,该二维频谱100表示相关目标的反射和意外信号的叠加,该意外信号例如被称为噪声。图2示出了由具
有两个频率f1和f2的2d傅里叶变换产生的相应的二维频谱100。如通过示例所示出的,检测到两个相关目标,并且每个目标被突出显示为峰130。
[0105]
峰参数(即,两个基本频率f1(第一维)和f2(第二维))可以特别地通过峰检测算法提取。可以将目标的数量估计为2d频谱100中的峰130的数量。频率f1可以仅取决于目标的距离r,并且频率f2可以取决于该目标的对应于峰130的相对速度v。
[0106]
由于对雷达系统1的雷达传感器中的嵌入式系统的可用带宽和存储器大小的约束,可能的是基于傅立叶的估计无法为特定用例提供必要的精细距离和多普勒分辨率。如前所述,2
‑
d频谱100中的每个峰130均被假设为单点目标。而在许多关键用例中,当多个目标在2d频谱100中可以共享相似的距离和相对速度并且彼此部分重叠时,可能会违反这种假设。在执行峰检测15之后,这可以导致全部由单个峰130表示的多个重叠目标110。因此,常规的峰检测算法不能解析多个目标,并且因此将单个峰130仅解释为单个目标。但是,为了对频谱100进行正确的解释,必须对该峰130评估多个目标。优选地,可以使用根据本发明的方法来克服该问题。
[0107]
出于该目的,根据图2,首先围绕单个检测到的峰130选择关注区域120。在这一阶段,尚不知道该峰130是否包括多于一个的单个目标。换句话说,根据本发明的方法的以下步骤用于确定关注区域120内的该特定峰130是否包括重叠目标110。更具体而言,还可以确定重叠目标110的数量。
[0108]
在已经执行从频谱100中选择20至少一个关注区域120作为输入信号105之后,具体而言,在峰130周围有预定义的像素区域,可以执行输入信号105的评估200以确定关于重叠目标110的信息(如重叠目标110的数量)。该评估200可以特定于模型阶数选择方法。
[0109]
根据图3,在执行至少一个关注区域120的峰检测15和选择20之后,为了为每个关注区域120提供一个输入信号105,可以向每个关注区域120应用二维频谱处理50,具体而言应用变换,优选地应用二维有限傅里叶逆变换,以确定至少一个相应的经变换的关注区域120。此外,在针对至少一个相应的经变换的关注区域120中的每一个的二维频谱处理50之后,可以执行窗口化补偿60以确定至少一个输入信号105中的每一个。然后可以使用输入信号105来执行评估200,以确定关于重叠目标110的参数,如由单个峰130表示的重叠目标110的数量。评估200的结果还可以用作高分辨率算法的输入,该高分辨率算法允许确定每个重叠目标110的其它参数。
[0110]
附图标记列表
[0111]1ꢀꢀꢀꢀ
系统
[0112]2ꢀꢀꢀꢀ
计算机、评估单元
[0113]3ꢀꢀꢀꢀ
数据存储单元
[0114]
10
ꢀꢀꢀ
提供
[0115]
15
ꢀꢀꢀ
峰检测
[0116]
20
ꢀꢀꢀ
选择
[0117]
50
ꢀꢀꢀ
频谱处理
[0118]
60
ꢀꢀꢀ
窗口化补偿
[0119]
100
ꢀꢀ
频谱
[0120]
105
ꢀꢀ
输入信号、输入数据
[0121]
110
ꢀꢀ
重叠目标
[0122]
120
ꢀꢀ
关注地区
[0123]
130
ꢀꢀ
峰
[0124]
200
ꢀꢀ
评估
[0125]
f1
ꢀꢀꢀ
第一频率
[0126]
f2
ꢀꢀꢀ
第二频率
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1