激光雷达装置的制作方法
1.本发明一般涉及遥感以及测距领域,尤其涉及一种激光雷达(lidar,light detection and ranging)装置,用于实时地进行自主驾驶系统中的三维的空间映射、物体检测、物体跟踪、物体确定。
背景技术:
2.激光雷达装置将搜索光向空间送出并扫描该空间,接收该搜索光被空间内的物体反射而产生的反射返回光,检测空间内的物体的方向和距离。作为构成这样的激光雷达装置的设备,已知有光学相控阵(opa,optical phased array)。与使用了机械式光束扫描设备的激光雷达装置相比,使用opa的激光雷达装置能够高速且小型地构成。
3.作为能够用于激光雷达装置的opa,以往已知有将由光耦合器、移相器、天线元件分别构成的多个单位单元排列而构成的opa(专利文献1)。然而,由于该opa的各个单位单元由上述光耦合器等多个要素构成,因此单位单元具有相应的尺寸。因此,使单位单元的配置间隔,即天线元件的配置间隔变小是有限度的,并且搜索光的光束转向的角度范围由于该配置间隔的大小而被限制得较窄。
4.另外,作为能够用于激光雷达装置的其他opa,以往已知有将光集成电路(photonic integrated circuit(pic))作为基础的opa(非专利文献1)。该opa由以下部分构成:输入光的总线波导;多个分支部分,分别由热移相器以及渐逝耦合器构成,设置于总线波导上;以及多个光栅基座的天线元件,将分别由上述渐逝耦合器分支的多个光分别向空间送出。在该opa中,通过改变输入光的波长,进行沿着上述天线元件的延伸方向的光束转向。
5.然而,在该opa中,如果要确保在实用上充分的光束转向角度范围,则需要具有极其宽的波长可变范围的波长可变激光器,激光雷达装置的整体成本增加。
6.现有技术文献以及专利文献
7.专利文献1:美国专利第8,988,754号说明书
8.非专利文献
9.非专利文献1:christopher v.poulton,ami yaacobi,david b.cole,matthew j.byrd,manan raval,diedrik vermeulen,michael r.watts,coherent solid
‑
state lidar with silicon photonic optical phased arrays,optics letters,vol.42,no.20/october15,2017。
技术实现要素:
10.根据上述背景,在使用了光学相控阵(opa)的激光雷达装置中,要求在不增加成本的情况下,克服天线元件的排列间距对于光束转向角度范围的限制,实现更宽的光束转向角度范围。
11.本发明的一个方式是一种激光雷达装置,其具备:光发送器,由第一光学相控阵构
成,将由从构成该第一光学相控阵的多个第一天线元件输出的光生成的衍射光向空间送出;以及光接收器,由第二光学相控阵构成,通过构成所述第二光学相控阵的多个第二天线元件接收从所述空间到来的光,关于从所述空间到来的光的方向,所述光接收器具有多个该光的接收灵敏度变得极大的极大灵敏度方向,所述光发送器向所述空间送出的相邻的所述衍射光的方向相互所成的第一角度与所述光接收器中的相邻的所述极大灵敏度方向相互所成的第二角度彼此不同。
12.根据本发明的其他方式,具备相移控制部,控制所述第一光学相控阵所具备的第一移相器和所述第二光学相控阵所具备的第二移相器,相移控制部控制所述第一移相器的相移量,使所述光发送器向所述空间送出的衍射光的主瓣的送出方向变化,并且控制所述第二移相器的相移量,使得所述极大灵敏度方向中具有最大灵敏度的所述极大灵敏度方向与所述主瓣的送出方向一致。
13.根据本发明的其他方式,所述第一天线元件的排列间隔和所述第二天线元件的排列间隔被设定为彼此不同的值。
14.根据本发明的其他方式,所述第一角度与所述第二角度之比被设定为由互质的自然数之比表示。
15.根据本发明的其他方式,所述第一天线元件的排列间隔与所述第二天线元件的排列间隔之比被设定为由互质的自然数之比表示。
16.根据本发明的其他方式,所述光发送器将由从所述多个第一天线元件输出的光生成的所述衍射光经由构成图像转换光学系统的第一光学部件向所述空间送出,所述第一角度的定义为,经由所述第一光学部件向所述空间送出的相邻的所述衍射光之间的角度。
17.根据本发明的其他方式,所述第一光学部件由两个凸透镜构成。
18.根据本发明的其他方式,所述第一光学部件由构成变形棱镜对的两个棱镜构成。
19.根据本发明的其他方式,所述光接收器经由构成图像转换光学系统的第二光学部件,通过所述多个第二天线元件接收从所述空间到来的光,所述第二角度的定义为,经由所述第二光学部件接收的从所述空间到来的光,其在所述空间中规定的相邻的所述极大灵敏度方向相互所成的角度。
20.根据本发明,在使用了opa的激光雷达装置中,能够在不增加成本的情况下,克服天线元件的排列间距对于光束转向角度范围的限制,实现更宽的光束转向角度范围。
附图说明
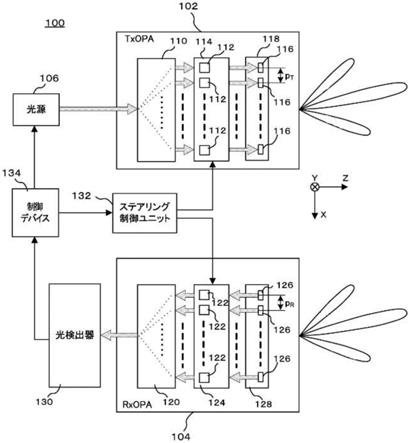
21.图1是表示本发明的第一实施方式涉及的激光雷达装置的结构的图。
22.图2是用于说明图1所示的激光雷达装置的动作的说明图。
23.图3是表示本发明的第二实施方式涉及的激光雷达装置的结构的图。
24.图4是表示本发明的第三实施方式涉及的激光雷达装置的结构的图。
25.图5是表示以往的激光雷达装置的结构的图。
26.图6是表示以往的激光雷达装置的特性的一个例子的图。
27.图7是表示能够用于激光雷达装置的光学相控阵的一个例子的图。
28.图8是表示图7所示的光学相控阵所具备的单位单元的结构的图。
29.图9是表示能够用于激光雷达装置的光学相控阵的另一个例子的图。
30.100、300、400、500
…
激光雷达装置,102、502
…
txopa,104、504
…
rxopa,106、506
…
光源,110、510
…
光分支器,112、122、512、522
…
移相器,114、124、514、524
…
相移单元,116、126、516、526
…
天线元件,118、128、518、528
…
天线单元,120、520
…
光耦合器,130、530
…
光检测器,132、532
…
转向控制单元,134、536
…
控制设备,346、446
…
光学单元,342、344
…
透镜,442、444
…
棱镜,700、900
…
opa。
具体实施方式
31.一般而言,opa由以下部分构成,光分支器,将输入的光分支为多个光;多个波导线,将分支后的多个光分别传播;移相器,设置于多个波导线并使在该波导线上传播的光的相位变化;以及天线元件,与各波导线连接并输出在该波导线上传播的光。另外,一般而言,与此相反,opa除了用于送出作为搜索光的光束的光发送器以外,还能够用于接收该光束的反射返回光的接收器。
32.例如,通过使由opa的各个天线元件接收到的光在各波导线上传播,并通过上述移相器改变相位,然后使用上述光分支器作为光耦合器(合波器),将在各波导线上传播的光合波为一个光并输出,从而能够构成光接收器。
33.在此,将opa作为光发送器使用,调整移相器中的相移量,以从该opa的天线元件向空间送出衍射光。另外,在该状态下,在保持移相器的相移量的状态下,使用上述opa作为光接收器从上述天线元件接收光。这样,从与上述衍射光的送出方向相同的方向到来的光在由各个天线元件接收之后,通过移相器相移到相同相位,在光耦合器内相互增强地输出。另外,相反地,从与上述衍射光的送出方向不同的方向到来的光在由各个天线元件接收之后,即使通过移相器受到相移也不会成为相同相位,在光耦合器内不相互增强地输出。因此,上述光接收器对于从上述衍射光的送出方向到来的光的接收灵敏度变得极大。另外,该光接收器对于上述衍射光中具有最大的强度的从主瓣的送出方向到来的光具有最大的接收灵敏度。
34.以下,在本说明书中,将由作为送出光束的发送器而发挥功能的opa构成的光发送器称为txopa,将由作为接收光的接收器而发挥功能的opa构成的光接收器称为rxopa。另外,在本说明书中,为了方便起见,在从构成rxopa的天线元件送出光时,将由从该天线元件送出的光产生的衍射光、主瓣以及旁瓣分别称为“rxopa的衍射光”、“rxopa的主瓣”以及“rxopa的旁瓣”。另外,在本说明书中,“rxopa的远场图像”是指,在从构成该rxopa104的天线元件送出光时,从该天线元件送出的光的远场图像。
35.另外,在本说明书中,rxopa的接收灵敏度是指,由该rxopa的天线元件接收到的光经由该rxopa的移相器以及光耦合器从该光耦合器输出为止所受到的损失的倒数(即,从光耦合器输出的光的光量相对于从同一方向到达天线元件的光的总光量之比的倒数)。
36.一般而言,进行三维的空间映射等的激光雷达装置能够通过图5所示的结构来实现。图5所示的激光雷达装置500具备由opa构成的txopa502和rxopa504,以及光源506。txopa502具有:光分支器510,对来自光源506的光进行分支;相移单元514,具备使由光分支器510分支的各个光的相位分别位移的多个移相器512;以及天线单元518,排列有将从相移单元514输出的各个光向空间放出的多个天线元件516。
37.另外,rxopa504具有:天线单元528,排列有接收在空间中传播的光的天线元件
526;相移单元524,具备使各个天线元件526接收到的光的相位分别位移的多个移相器522;以及光耦合器520,将相移单元524输出的光耦合为一个并输出。
38.激光雷达装置500还具备:光检测器530,接收rxopa504输出的光;转向控制单元532,控制txopa502以及rxopa504的相移单元514、524的移相器512、522的动作;以及控制设备536,控制光源506以及转向控制单元532,并且接收光检测器530的输出,进行例如用于空间映射等的数据生成处理。
39.光源506例如是脉冲激光器,控制设备536例如通过飞行时间(tof)法测定到空间内的物体的距离。
40.来自光源506的光信号入射到txopa502。转向控制单元532使相移单元514的移相器512动作,使衍射光从构成txopa502的天线单元518的排列的多个天线元件516向空间送出,并且使这些衍射光向空间的送出方向变化来进行光束转向。
41.另外,转向控制单元532使rxopa504的相移单元524的移相器522动作,以使rxopa504的衍射光与txopa502当前送出的衍射光对应地朝向与这些衍射光相同的方向。由此,rxopa504对于从txopa502的主瓣的送出方向到来的光具有最大接收灵敏度,对于从txopa502的旁瓣的送出方向到来的光具有极大接收灵敏度。
42.在此,在以往的激光雷达装置500中,一般而言,为了提高衍射光的收敛度并提高物体检测中的空间分辨率,天线元件516、526的数量要求数千左右的数量。另外,一般而言,为了尽可能宽地确保作为搜索光使用的主瓣的转向角度范围,天线元件516、526各自的配置间隔同时尽可能窄地设计,使得与主瓣的转向角度范围相邻的衍射光不会进入,其结果为,设计为具有彼此相同的配置间隔p。
43.其结果为,txopa502和rxopa504的衍射光同时具有相同的方向。图6是表示图5所示的txopa502以及rxopa504的例示性的特性的图。图6的上层是关于txopa502,在从光分支器510的光输入端到天线元件516的各个光输出端为止的各个光路径(各个通道)中产生的光相位差为零时,从天线单元518送出的光的远场图像。另外,图6的中层是关于rxopa504,表示在从天线元件526的各个光输入端到光耦合器520的光输出端为止的各个光路径(各个通道)中产生的光相位差为零时,相对于从空间到来的光的方向的rxopa504的接收灵敏度的分布的图。另外,图6的下层是表示在将具有图6的上层所示的光强度分布的衍射光向空间送出,通过具有图6的中层所示的接收灵敏度分布的rxopa504接收到来自空间的反射返回光时,该激光雷达装置500的总灵敏度相对于从激光雷达装置500观察的空间内的各方向的分布的图。
44.在图6中,上层、中层以及下层的横轴均是以相对于z轴的角度θ的正弦值表示xz平面内的各方向(图5的图示上下方向的方位)的轴。另外,图6的上层的纵轴是将从txopa502送出的光的强度以主瓣的最大强度标准化后的标准化光强度。另外,图6的中层的纵轴是将rxopa504的接收灵敏度以其最大接收灵敏度值标准化后的标准化接收灵敏度。此外,图6的下层的纵轴是将激光雷达装置500的总灵敏度以其最大值标准化后的标准化总灵敏度。
45.在图6上层,在sinθ=0的位置具有最大强度的光强度部分600相当于从txopa502输出的衍射光的主瓣(衍射次数为零的主极大光束),该最大的光强度部分以外的光强度部分602、604、606、608、610、612相当于旁瓣(衍射次数为零以外的衍射光束)。其中,光强度部分602、604相当于与主瓣相邻的旁瓣(衍射次数为
±
1),在sinθ=
±
λ0/p的位置产生。在此,
λ0是光源506输出的光的中心波长,p是天线元件516的排列间距。
46.rxopa504的天线元件526以与txopa502的天线元件516相同的排列间距p排列,因此rxopa504的衍射光分别朝向与txopa502相同的方向。因此,图6中层所示的rxopa504的接收灵敏度在与相当于图6上层的txopa502的衍射光的光强度部分600、602、604、606、608、610、612相同的位置分别具有极大部分620、622、624、626、628、630、632,在与相当于txopa502的主瓣的光强度部分600相同的位置具有接收灵敏度变得最大的极大部分620。
47.另外,激光雷达装置500的总灵敏度与txopa502送出的光强度分布(即,图6上层所示的标准化光强度的值)和rxopa504中的接收灵敏度分布(即,图6中层所示的标准化接收灵敏度的值)的积成比例。因此,如图6下层所示,激光雷达装置500的总灵敏度在txopa502的光强度的极大部分与rxopa504的接收灵敏度的极大部分一致的位置(mλ0/p、m=0、
±
1、
±
2、
±
3)中,具有极大部分640、642、644、646、648、650、652,在与主瓣对应的位置(sinθ=0)具有表示最大的总灵敏度的极大部分640。
48.在该激光雷达装置500中,如果在txopa502的各个通道和rxopa504的各个通道中分别产生相同的相移,并且使txopa502以及rxopa504的衍射光的方向以相同的方式变化,则图6上层的光强度部分600等以及图6中层的极大部分620等分别向相同的方向位移相同的量。另外,与此相应地,图6下层的极大部分640等也向与此相同的方向位移相同的量。
49.因此,例如,在使用txopa502的主瓣作为搜索光并进行光束转向的情况下,在图6下层,为了使相邻的旁瓣的总灵敏度的极大部分642、644不进入使用了该主瓣的情况下的总灵敏度的极大部分640的图示左右方向的位移范围内,该光束转向的范围被限制在数学式(1)的范围内。
50.[数学式1]
[0051]
即,如果设为α
max
≡λ0/2p,则转向角度α的允许范围为
‑
α
max
~+α
max
,其结果为,转向角度α的最大允许范围被天线元件516、526的排列间距p的大小限制。
[0052]
需要说明的是,在上述的说明中,对xz平面中的光束转向进行了说明,但在yz平面中,也与上述同样地,依赖于天线元件516、526的y轴方向上的排列间距的大小,光束转向的转向角度范围被限制。
[0053]
另一方面,作为能够用于激光雷达装置的opa,如上所述,已知有将分别放出光的多个单位单元排列而构成的opa(专利文献1)。图7是表示这样的opa700的结构的一部分的图,图8是表示构成opa700的单位单元710的结构的图。
[0054]
参照图7,从光纤702输入的光在列方向总线波导704中传播。在列方向总线波导704中传播的光被以规定的间隔设置于该列方向总线波导704的多个渐逝耦合器706分支而在多个行方向总线波导708中传播。各个单位单元710(图示虚线椭圆所示的16个部分的各个部分)经由渐逝耦合器800(后述)从接近的行方向总线波导708接收在该行方向总线波导708中传播的光的一部分。另外,在各个单位单元710上连接有作为电流路径的列方向控制线712和行方向控制线714,各个单位单元710所具有的移相器806(后述)被选择性地通电。
[0055]
参照图8,各个单位单元710具备:渐逝耦合器800,耦合于上述行方向总线波导708;天线元件802;波导804,连接该渐逝耦合器800与天线元件802;移相器806,是设置于该波导804的s字部分的加热器;以及列方向电极808和行方向电极810,是用于对作为移相器806的加热器通电的两个电极。列方向电极808以及行方向电极810分别与上述列方向控制
线712和行方向控制线714连接。
[0056]
图7所示的opa700能够产生沿着行方向和/或列方向可控制的线性相位倾斜,能够作为进行xz平面以及yz平面中的可控制的光束转向的opa进行动作。
[0057]
然而,在根据专利文献1的图7的opa700中,各个单位单元710除了天线元件802以外还具有较多的追加元件(移相器806、波导804、渐逝耦合器800),因此无法充分减小其尺寸。其结果为,专利文献1的opa700无法将单位单元710(具体而言,单位单元710所具备的天线元件802)在x方向以及y方向的双方具有足够小的间距p地排列。
[0058]
例如,在opa700中实现的单位单元710的排列间距为9μm左右,在使用中心波长为1550nm的光并进行光束转向的情况下,能够用于该光束转向的转向角度α的允许范围根据数学式(1)被限制为
±5°
。
[0059]
作为能够用于激光雷达装置的其他opa,如上所述,已知有将非专利文献1公开的光集成电路作为基础的opa。图9是表示根据非专利文献1的opa900的结构的图。该opa900具备:总线波导902,用于输入光;以及部分904,由设置在总线波导902上并交替级联连接的热移相器以及渐逝耦合器构成。由上述渐逝耦合器分支出的光分别经由波导线部906与排列有光栅基座的天线元件的天线部908连接。在该opa900中,通过上述热移相器,控制依次输入到上述排列的天线元件的光的相位增量,并且控制输入到总线波导902的光的波长,从而提供二维的光束转向功能。
[0060]
图5所示的txopa502以及rxopa504例如能够通过使构成opa900的天线部908的光栅基座的多个天线元件分别在图5的图示y方向上延伸,并将这些多个天线元件在x方向上排列而构成。
[0061]
然而,构成天线部908的多个天线元件构成为在基板上形成的波导,该天线元件的排列间距(上述x方向的排列间距)与上述形成的波导的排列间距相等。该波导的排列间距的允许最小值被该波导的光限制强度限制,如果增大基板与波导的折射率差来提高光的限制强度,则能够缩窄天线元件的排列间距。然而,根据基板原材料等,能够实现的上述折射率差是有限度的,难以使上述排列间距从几μm大幅减小。因此,在opa900的x方向上的光束转向中,与上述的opa700同样地,可能产生转向角度范围被限制在几度左右的问题。
[0062]
另外,在opa900中,如果想要在y方向上确保在实用上充分的光束转向范围,则如以下所示,需要波长可变范围极其宽的波长可变激光器,激光雷达装置整体的成本可能大幅增加。相反地,在opa900中,难以在不大幅增加成本的情况下实现y方向上的实用的光束转向范围。
[0063]
即,在波长可变激光器的振荡波长相对于中心波长λ0变化了δλ的情况下,从天线部908放出的主瓣的转向角度α
y
(yz平面中的主瓣相对于z轴的偏转角)由数学式(2)算出。
[0064]
[数学式2]
[0065]
在此,n
e
是构成上述天线元件的波导的有效折射率,p
g
是设置于各个天线元件的光栅间距。波长可变激光器的中心波长λ0通常被选择为满足数学式(3),使得在波长位移为零(δλ=0)时转向角度α
y
为零(α
y
=0)。
[0066]
[数学式3]
[0067]
另外,在波长可变激光器的最大波长变化范围为λ0±
δλ
max
时,可以由opa900实现的y方向上的转向角度α
y
的变化范围
‑
α
ymax
~+α
ymax
的α
ymax
由数学式(4)的关系导出。
[0068]
[数学式4]
[0069]
在此,光栅间距p
g
通常以接近半波长λ0/2的值来制作。如果p
g
=λ0/2,则数学式(4)成为数学式(5)。
[0070]
[数学式5]
[0071]
即,在最大转向角度α
ymax
=30
°
的情况下,如果中心波长λ0为1550nm,则2δλ
max
成为775nm,需要可以在1550
±
387.5nm的宽范围内控制振荡波长的波长可变激光器。另外,找出满足这样的条件的市售的波长可变激光器是极其困难的,或者即使找到也极昂贵。
[0072]
以下,对本发明的实施方式涉及的激光雷达装置进行说明。
[0073]
<第一实施方式>
[0074]
图1是表示本发明的第一实施方式涉及的激光雷达装置的结构的图。该激光雷达装置100具备:光源106;txopa102,将光源106的输出光向空间送出;rxopa104,接收从txopa102送出的光中的从空间内的物体反射回来的反射返回光;以及光检测器130,检测从rxopa104输出的光。光源106例如是脉冲激光器。
[0075]
txopa102具有:光分支器110,对光源106的输出光进行分支;相移单元114,具备使由光分支器110分支后的各个光的相位分别位移的多个移相器112;以及天线单元118,排列有将从相移单元114输出的各个光向空间放出的多个天线元件116。天线元件116例如沿着图示x轴以及y轴,在由该x轴以及y轴规定的xy平面内,以相互的间隔为排列间距(排列间隔)p
t
的方式二维排列。
[0076]
rxopa104具有:天线单元128,排列有接收上述反射返回光的天线元件126;相移单元124,具备使各个天线元件126接收到的光的相位分别位移的多个移相器122;以及光耦合器120,将相移单元124输出的光耦合为一个并输出。天线元件126例如沿着图示x轴以及y轴,在由该x轴以及y轴规定的xy平面内,以相互的间隔为排列间距(排列间隔)p
r
的方式二维排列。由此,rxopa104成为rxopa104的多个衍射光的方向分别成为接收灵敏度变得极大的极大灵敏度方向。即,rxopa104构成为,关于从空间到来的光的方向,具有该光的接收灵敏度变得极大的多个极大灵敏度方向。
[0077]
在此,txopa102是由第一光学相控阵构成的光发送器,相当于向空间送出衍射光的光送出器,所述衍射光是由从构成该第一光学相控阵的多个第一天线元件输出的光生成的。上述第一光学相控阵相当于包括光分支器110、具备作为第一移相器的移相器112的相移单元114,和具备作为第一天线元件的天线元件116的天线单元118的部分。
[0078]
另外,rxopa104是由第二光学相控阵构成的光接收器,相当于通过构成该第二光学相控阵的多个第二天线元件接收从空间到来的光的光接收器。上述第二光学相控阵相当于包括光耦合器120、具备作为第二移相器的移相器122的相移单元124,和具备作为第二天线元件的天线元件126的天线单元128的部分。
[0079]
txopa102以及rxopa104例如能够使用专利文献1所记载的opa来构成。即,txopa102是作为天线元件116例如图8所示的天线元件802在图1的图示x方向以及y方向上以间隔(排列间距)p
t
在xy平面内二维排列而构成的。同样地,rxopa104是作为天线元件126例如图8所示的天线元件802在图1的图示x方向以及y方向上以间隔(排列间距)p
r
在xy平面内二维排列而构成的。
[0080]
另外,txopa102的移相器112例如由图8所示的移相器806构成,所述移相器806是
由设置在波导804上的加热器构成的热移相器。同样地,rxopa104的移相器122例如由图8所示的移相器806构成,所述移相器806由设置在波导804上的加热器构成。
[0081]
此外,txopa102的光分支器110以及rxopa104的光耦合器120均可由例如图7、图8所示的、传播来自光源106的光的列方向总线波导704以及行方向总线波导708、渐逝耦合器706以及800构成。
[0082]
但是,上述的txopa102以及rxopa104的结构是一个例子,并不限定于此。例如,txopa102以及rxopa104的天线单元118以及128只要分别发送以及接收光的天线元件116以及126均在图示xy平面上分别以排列间距p
t
以及p
r
二维排列,则能够具有任意的结构。
[0083]
另外,相移单元114以及124不限于上述,也能够分别由任意结构的移相器构成,所述移相器设置在传播由光分支器110分支后的光的各个光路径,以及传播由天线元件126接收到的光的各个光路径中。同样地,光分支器110以及光耦合器120不限于上述,只要分别具有对输入的光进行分支的功能,以及对输入的光进行合波而耦合为一个光的功能,则能够使用根据任意的结构或原理进行动作的光分支器以及光耦合器。
[0084]
激光雷达装置100还具有控制设备134和作为相移控制部的转向控制单元132。转向控制单元132在控制设备134的控制下控制txopa102以及rxopa104的移相器112、122的动作。控制设备134进行光源106的光脉冲输出动作和txopa102的移相器112以及rxopa104的移相器122的动作的同步,并且基于来自光检测器130的信号来进行用于空间映射等的数据生成处理等。
[0085]
即,根据上述结构,激光雷达装置100在控制设备134的控制下,通过转向控制单元132使移相器112、122产生所希望的相移,维持txopa102的主瓣的射出方向与rxopa104的最大接收灵敏度方向朝向相同方向的状态,并且使它们的方向在图示x方向和/或y方向上变化而进行光束转向。由此,激光雷达装置100通过txopa102的主瓣进行光束转向,并且通过rxopa104接收来自txopa102的主瓣照射方向的反射返回光。
[0086]
另外,激光雷达装置100通过控制设备134测量光源106发出光脉冲后到经由rxopa104接收该光脉冲的反射返回光为止的时间,从而通过飞行时间法来计算到存在于txopa102的主瓣照射方向的物体的距离。然后,激光雷达装置100依次检测从与上述光束转向动作相应地依次变化的txopa102的主瓣的射出方向到来的反射返回光,检测到上述依次变化的方向上的物体的距离,从而生成例如用于空间映射等的数据等。
[0087]
特别是,本实施方式涉及的激光雷达装置100被设定为,txopa102的天线元件116的排列间距p
t
与rxopa104的天线元件126的排列间距p
r
具有彼此不同的值,例如具有数学式(6)的关系。在此,n1/m1是既约函数,m1以及n1是互质的自然数。
[0088]
[数学式6]
[0089]
由此,激光雷达装置100与使用天线元件的排列间距为相同值p的txopa以及rxopa而构成的以往的激光雷达装置(例如激光雷达装置500)相比,能够在不使txopa102的天线元件116的排列间距p
t
相对于上述p减少的情况下,使txopa102的主瓣的转向角α在更宽的范围内变化来进行光束转向。以下,对其进行说明。
[0090]
需要说明的是,在以下的说明中,为了方便起见,以x轴方向上的光束转向动作为例进行说明。本领域技术人员可知,该说明在与x轴正交的y轴方向上也同样成立。
[0091]
如上所述,本实施方式涉及的激光雷达装置100构成为,txopa102的天线元件116
的排列间距p
t
与rxopa104的天线元件126的排列间距p
r
具有彼此不同的值。因此,txopa102向空间送出的相邻的衍射光的方向相互所成的第一角度与rxopa104的相邻的衍射光的方向即相邻的极大灵敏度方向相互所成的第二角度彼此不同。
[0092]
因此,如果以使txopa102以及rxopa104的主瓣的方向一致的方式控制txopa102以及rxopa104,则与该主瓣相邻的旁瓣的方向在txopa102和rxopa104不同。即,从txopa102送出的上述相邻的旁瓣的方向上的rxopa104的接收灵敏度不具有极大值,因此可以抑制从该相邻的旁瓣的方向到来的光的接收。其结果为,txopa102的主瓣的转向角度范围不受该主瓣和与其相邻的旁瓣之间的角度的限制,能够利用更宽的转向角度范围。
[0093]
更详细而言,txopa102的相邻的衍射光的偏转角(相对于图示z轴的角度)的正弦值的差δω
t
,以及rxopa104的相邻的衍射光的偏转角的正弦值的差δω
r
分别由数学式(7)以及数学式(8)表示。
[0094]
[数学式7]
[0095]
[数学式8]
[0096]
另外,根据数学式(6)、(7)、(8),数学式(9)成立。
[0097]
[数学式9]
[0098]
即,在激光雷达装置100中,设定为txopa102向空间送出的相邻的衍射光的方向相互所成的第一角度与rxopa104的相邻的极大灵敏度方向相互所成的第二角度之比由互质的自然数之比表示。
[0099]
数学式(9)能够表示为数学式(10)。
[0100]
[数学式10]
[0101]
即,如果设为txopa102以及rxopa104的主瓣的方向相同,则从txopa102中的主瓣数起的第m1个旁瓣的方向与从rxopa104中的主瓣数起第n1个旁瓣的方向初次一致。换言之,txopa102中的第1~m1‑
1个旁瓣的反射光在rxopa104中的接收被抑制。
[0102]
其结果为,txopa102的主瓣的转向角度α的允许变化范围
‑
α
max
~+α
max
的α
max
由数学式(11)决定。
[0103]
[数学式11]
[0104]
即,根据数学式(1)与数学式(11)的比较可知,即使将构成激光雷达装置100的txopa102的天线元件116的排列间距p
t
设定为以往的激光雷达装置500的txopa502的排列间距p(即,不将排列间距p
t
设定为小于p的值),激光雷达装置100的光束转向的允许角度范围也提高到以往的激光雷达装置500的允许角度范围的m倍。
[0105]
图2是用于说明在数学式(6)中设为n=5、m=6时的激光雷达装置100的动作的图。图2的上层是表示从txopa102的天线单元118送出的光的远场图像的一个例子的图,图2的中层是表示rxopa104中的光的接收灵敏度分布的图。另外,图2的下层是表示作为图2的上层以及中层分别示出的光强度与接收灵敏度的积而得到的、激光雷达装置100中的总灵敏度的分布的图。图2的横轴均为xz平面中的相对于z轴方向的角度θ的正弦值sinθ。另外,图2上层的纵轴是通过最大光强度而标准化后的标准化光强度,图2中层的纵轴是通过最大接收灵敏度而标准化后的标准化接收灵敏度,图2下层的纵轴是以总灵敏度的最大值而标准化后的标准化总灵敏度。
[0106]
在图2上层所示的txopa102的光强度分布中,从存在于sinθ=0的位置的txopa102
的主瓣200数起第m个即第6个旁瓣202、204的位置与极大灵敏度部分212、214的位置一致,所述极大灵敏度部分212、214相当于从最大强度部分210起第m个即第5个旁瓣,所述最大强度部分210相当于在图2中层所示的rxopa104的接收灵敏度分布中存在于sinθ=0的位置的rxopa104的主瓣。
[0107]
因此,如图2下层所示,激光雷达装置100中的总灵敏度的分布相对于与txopa102以及rxopa104的主瓣对应的sinθ=0的位置处的具有最大灵敏度的极大部分220,与其相邻的总灵敏度的极大部分222、224大幅远离而出现在sinθ=
±
6λ0/p
t
(=
±
5λ0/p
r
)的位置。其结果为,在激光雷达装置100中,通过以使txopa102的主瓣的方向与rxopa104的主瓣的方向一致的方式控制移相器112以及122,能够在不缩小txopa102的天线元件116的配置间距p
t
的情况下,如数学式(11)所示,将txopa102的主瓣的光束转向角α的变化范围与以往的激光雷达装置相比扩大为m倍即6倍。
[0108]
具体而言,本实施方式涉及的激光雷达装置100如以下那样进行动作。需要说明的是,在以下的说明中,为了方便起见,假设在图示x轴方向上进行光束转向。但是,如本领域技术人员所理解的那样,通过配合以下所示的x轴方向的光束转向动作,进行与该x轴方向的光束转向动作相同的图示y轴方向的光束转向动作,从而能够进行二维的光束转向动作。
[0109]
首先,激光雷达装置100的控制设备134控制光源106,以一定的时间间隔产生光脉冲。另外,控制设备134指示转向控制单元132,使从txopa102向空间送出的主瓣的x方向的偏转角α(转向角α)变化来进行光束转向。更具体而言,转向控制单元132控制移相器112,使得从各个天线元件116射出的光的相位沿着x轴具有与上述偏转角α对应的线性相位倾斜,并且使该偏转角α在规定的转向角度范围内以规定的模式随时间变化。在此,与上述偏转角α对应的线性相位倾斜可以通过设定各个移相器122来实现,使得在从光分支器110的光输入端到各个天线元件116的输出端的各个光路径(各个通道)中产生的相移量遵循数学式(12)。
[0110]
[数学式12]
[0111]
在此,q是分别对与各个通道对应的天线元件116,沿着该天线元件116的x轴的位置从一端依次标注的索引,q=
‑
q、
…
、
‑
1、0、1、
…
、q。
[0112]
另外,控制设备134指示转向控制单元132来控制移相器122,使得rxopa104的主瓣具有与txopa102的主瓣相同的偏转角α。具体而言,转向控制单元132设定各个移相器122,使得从各个天线元件126的光接收端到光耦合器120的光输出端的各个光路径(各个通道)中产生的相移量遵循数学式(13)。
[0113]
[数学式13]
[0114]
在此,s是分别对与各个通道对应的天线元件126,沿着该天线元件126的x轴的位置从一端依次标注的索引,是q=
‑
s、
…
、
‑
1、0、1、
…
、s。根据数学式(12)、(13),在与具有相同的索引值u的天线元件116以及126分别对应的各个通道中应该产生的相位以及满足数学式(14)。
[0115]
[数学式14]
[0116]
即,在rxopa104的各个通道中产生的相移需要设为在txopa102的各个通道中产生的相移的p
r
/p
t
倍。
[0117]
此外,控制设备134如上述那样将txopa102以及rxopa104的主瓣控制为相同的方向,并且测量从光源106输出并从txopa102作为主瓣送出的光脉冲从rxopa104的主瓣方向被接收为止的时间,计算到存在于该主瓣方向的物体为止的距离。由此,控制设备134例如能够生成txopa102的主瓣的光束转向范围内的空间映射用数据。
[0118]
需要说明的是,在本实施方式中,构成为txopa102的天线单元118的排列间距p
t
与rxopa104的天线单元128的排列间距p
r
具有数学式(6)的关系,但并不限定于此。例如,即使排列间距p
t
和p
r
仅具有彼此不同的值,也与上述同样地,在txopa102和rxopa104中使旁瓣的方向不同,能够扩大txopa102的主瓣的转向角的允许范围。
[0119]
另外,即使天线单元118的实际的排列间距p
t
和/或天线单元128的实际的排列间距p
r
不满足数学式(6),例如通过在txopa102的天线元件116的光束射出部分和/或rxopa104的天线元件126的光束到来部分配置透镜等构成图像转换光学系统的光学部件,如果从经由这些光学部件从txopa102射出的衍射光换算的实质的排列间距p
te
,和/或从经由这些光学部件rxopa104接收的光的接收灵敏度换算的实质的排列间距p
re
彼此不同(例如如果满足数学式(6)),则与上述同样地,能够扩大txopa102的主瓣的转向角的允许范围。
[0120]
换言之,在txopa102的衍射光经由构成图像转换光学系统的光学部件向空间送出的情况下,txopa102向空间送出的相邻的衍射光的方向相互所成的第一角度的定义为,经由该光学部件向空间送出的相邻的衍射光之间的角度。另外,rxopa104中的相邻的极大灵敏度方向相互所成的第二角度的定义为,在rxopa104经由构成图像转换光学系统的光学部件从空间接收光的情况下,通过该光学部件之前的上述空间中的相邻的极大灵敏度方向相互所成的角度。另外,与上述同样地,只要以上述第一角度与上述第二角度成为彼此不同的值的方式(例如,以上述第一角度与上述第二角度之比成为互质的自然数之比的方式)进行设定,则根据与上述相同的原理,能够扩大txopa102的主瓣的转向角的允许范围。
[0121]
<第二实施方式>
[0122]
接着,对本发明的第二实施方式涉及的激光雷达装置进行说明。
[0123]
图3是表示本发明的第二实施方式涉及的激光雷达装置300的结构的图。在图3中,对于与图1所示的第一实施方式涉及的激光雷达装置100相同的构成要素,使用与图1所示的符号相同的符号,引用关于上述的激光雷达装置100的说明。
[0124]
激光雷达装置300具有与激光雷达装置100相同的结构,不同点是在txopa102的天线单元118的光送出侧配置有构成图像转换光学系统的光学单元346。本实施方式中的光学单元346所构成的图像转换光学系统例如由双片透镜系统构成,所述双片透镜系统由分别具有焦距f1以及f2的两个凸透镜即透镜342以及344构成,并且具有图像倍率k1。
[0125]
由于具有上述的结构的激光雷达装置300在txopa102的光送出侧具备具有图像倍率k1的光学单元346,因此txopa102实质上作为在从透镜344向图示右侧距离f2的位置具备以k1倍的排列间距k1·
p
t
排列的天线元件316的opa而发挥功能。因此,通过将光学单元346、txopa102,以及rxopa104构成为k1·
p
t
≠p
r
,与第一实施方式涉及的激光雷达装置100同样地,使txopa102向空间送出的相邻的衍射光相互所成的第一角度与rxopa104中的该空间中的相邻的极大灵敏度方向相互所成的第二角度不同,能够在不缩小p
t
的情况下扩大txopa102的主瓣的转向角度的允许范围。
[0126]
例如,在本实施方式中,以使图像倍率k1以及排列间距p
t
、p
r
满足数学式(15)的方
式构成光学单元346、txopa102以及rxopa104。
[0127]
[数学式15]
[0128]
在此,与数学式(6)同样地,n2/m2是既约函数,m2、n2是互质的自然数。图像倍率k1使用构成光学单元346的两个透镜342、344的焦距f1、f2,由数学式(16)给出。
[0129]
[数学式16]
[0130]
此时,从txopa102通过光学单元346向空间送出的相邻的衍射光的偏转角的正弦值的差δω
t2
由数学式(17)给出。
[0131]
[数学式17]
[0132]
需要说明的是,在rxopa104上没有配置透镜光学系统,因此rxopa104中的相邻的衍射光(即,相邻的接收灵敏度极大方向)的偏转角的正弦值的差δω
r
与激光雷达装置100同样地由数学式(8)给出。
[0133]
根据上述的数学式(15)、(17)以及数学式(8),得到数学式(18)。
[0134]
[数学式18]
[0135]
即,可以得知,在从光学单元346向空间送出的txopa102的衍射光中,从txopa102的主瓣数起的第m2个旁瓣的方向与从rxopa104中的主瓣数起第n2个旁瓣的方向一致。
[0136]
因此,从光学单元346向空间送出的主瓣的转向角α的允许可变范围
‑
α
max
~α
max
的α
max
由数学式(19)给出。
[0137]
[数学式19]
[0138]
即,在激光雷达装置300中,也与激光雷达装置100同样地,能够在不缩小txopa102的天线元件116的排列间距p
t
的情况下,扩大从txopa102输出并向空间送出的主瓣的转向角度的允许范围。特别是,在激光雷达装置300中,txopa102的天线元件116的、从光学单元346的光输出侧观察的实质的排列间距,由txopa102本身的排列间距p
t
与光学单元346的图像倍率k1之积k1p
t
来给出,因此与激光雷达装置100相比,能够进一步提高设计自由度。
[0139]
具体而言,本实施方式涉及的激光雷达装置300如以下那样进行动作。需要说明的是,在以下的说明中,为了方便起见,假设在图示x轴方向上进行光束转向。但是,如本领域技术人员所理解的那样,通过配合以下所示的x轴方向的光束转向动作,进行与该x轴方向的光束转向动作相同的图示y轴方向的光束转向动作,从而能够进行二维的光束转向动作。
[0140]
本实施方式涉及的激光雷达装置300与上述的激光雷达装置100同样地进行动作,但转向控制单元332的动作与转向控制单元132稍微不同。转向控制单元332使从txopa102向空间送出的主瓣的偏转角α(转向角α)在x方向上变化而进行光束转向。更具体而言,转向控制单元332控制移相器112,使得从通过图像转换形成的虚拟的天线元件316射出的光的相位沿着x轴具有与上述偏转角α对应的线性相位倾斜,并且使该偏转角α在规定的转向角度范围内以规定的模式随时间变化。在此,与上述偏转角α对应的线性相位倾斜可以通过设定各个移相器122来实现,使得在从光分支器110的光输入端到各个天线元件116的输出端的各个光路径(各个通道)中产生的相移量遵循数学式(20)。
[0141]
[数学式20]
[0142]
在此,q是分别对与各个通道对应的天线元件116,沿着该天线元件116的x轴的位置从一端依次标注的索引,q=
‑
q、
…
、
‑
1、0、1、
…
、q。
[0143]
需要说明的是,以rxopa104的主瓣具有与上述相同的偏转角α的方式通过移相器
122在rxopa104的各个通道中产生的相移量与激光雷达装置100的情况同样地由数学式(13)给出。
[0144]
与数学式(14)同样地,根据数学式(13)、(20),在与具有相同的索引值u的天线元件116以及126分别对应的各个通道中应该产生的相位以及满足数学式(21)。
[0145]
[数学式21]
[0146]
即,在rxopa104的各个通道中产生的相移需要设为在txopa102的各个通道中产生的相移的p
r
/(k1·
p
t
)倍。
[0147]
需要说明的是,在本实施方式中,激光雷达装置300使用具有彼此不同的排列间距p
t
以及p
r
的txopa102以及rxopa104来构成,但并不限定于此。在激光雷达装置300中,只要满足数学式(15),排列间距p
t
以及p
r
也可以是相同的值。即,激光雷达装置300也能够代替txopa102以及rxopa104而使用各个天线元件的排列间隔相同的txopa以及rxopa来构成。
[0148]
<第三实施方式>
[0149]
接着,对本发明的第三实施方式涉及的激光雷达装置进行说明。
[0150]
在上述的第二实施方式涉及的激光雷达装置300中,通过由双片透镜系统构成的作为图像转换光学系统的光学单元346,扩大了txopa102的天线元件116的实质的排列间距。与此相对,在第三实施方式中,作为图像转换光学系统,使用变形棱镜对将天线元件116的实质的排列间距在一维方向上扩大。
[0151]
图4是表示本发明的第三实施方式涉及的激光雷达装置400的结构的图。在图4中,对于与图1所示的第一实施方式涉及的激光雷达装置100相同的构成要素,使用与图1所示的符号相同的符号,引用关于上述的激光雷达装置100的说明。
[0152]
激光雷达装置400具有与激光雷达装置100相同的结构,不同点是在txopa102的天线单元118的光送出侧配置有由变形棱镜对构成的光学单元446,所述变形棱镜对由两个棱镜442、444构成。
[0153]
在本实施方式中,由两个棱镜442、444构成的变形棱镜对构成为在图示x方向上放大图像。因此,图示y方向上的txopa102的主瓣的光束转向与图1所示的第一实施方式涉及的激光雷达装置100相同。
[0154]
由于具有上述的结构的激光雷达装置400在txopa102的光送出侧具备在图示x方向上具有图像倍率k2的光学单元446,因此txopa102实质上作为具备从光输出侧的棱镜444的光输出面(图示右侧面)向图示左侧距离d的位置以k2倍的排列间距k2·
p
t
排列的天线元件416的opa而发挥功能。因此,通过将光学单元446、txopa102,以及rxopa104构成为k2·
p
t
≠p
r
,关于x方向,与第一实施方式涉及的激光雷达装置100同样地,使txopa102向空间送出的相邻的衍射光相互所成的第一角度与rxopa104中的该空间中的相邻的极大灵敏度方向相互所成的第二角度不同,能够在不缩小p
t
的情况下扩大txopa102的主瓣的转向角度的允许范围。需要说明的是,关于y方向,激光雷达装置400与激光雷达装置100同样地进行动作,与激光雷达装置100同样地,能够在不缩小p
t
的情况下扩大txopa102的主瓣的转向角度的允许范围。
[0155]
例如,在本实施方式中,以使图像倍率k2、排列间距p
t
以及p
r
满足数学式(22)的方式构成光学单元446、txopa102以及rxopa104。
[0156]
[数学式22]
[0157]
在此,如上所述,由于光学单元446仅在x方向上放大图像,因此在激光雷达装置400中,图示y方向上的txopa102的主瓣的光束转向与图1所示的第一实施方式涉及的激光雷达装置100相同。因此,以下,对图示x方向的光束转向进行说明。
[0158]
在上述的数学式(22)中,n3/m3是既约函数,m3、n3是互质的自然数。此时,从txopa102通过光学单元446向空间送出的相邻的衍射光的偏转角的正弦值的差δω
t3
由数学式(23)给出。
[0159]
[数学式23]
[0160]
需要说明的是,在rxopa104上没有配置透镜光学系统,因此rxopa104中的相邻的衍射光(即,相邻的接收灵敏度极大方向)的偏转角的正弦值的差δω
r
与激光雷达装置100同样地由数学式(8)给出。
[0161]
根据上述的数学式(22)、(23)以及数学式(8),得到数学式(24)。
[0162]
[数学式24]
[0163]
即,可以得知,在从光学单元446向空间送出的txopa102的衍射光中,从txopa102的主瓣数起第m3个旁瓣的方向与从rxopa104中的主瓣数起第n3个旁瓣的方向一致。
[0164]
因此,从光学单元446向空间送出的主瓣的转向角α的允许可变范围
‑
α
max
~α
max
的α
max
由数学式(25)给出。
[0165]
[数学式25]
[0166]
即,在激光雷达装置400的x方向的光束转向动作中,也与激光雷达装置100同样地,能够在不缩小txopa102的天线元件116的排列间距p
t
的情况下,扩大从txopa102输出并向空间送出的主瓣的转向角度的允许范围。特别是,在激光雷达装置400中,txopa102的天线元件116的、从光学单元446的光输出侧观察的x方向上的实质的排列间距,由txopa102本身的排列间距p
t
与光学单元446的图像倍率k2之积k2p
t
来给出,因此与激光雷达装置100相比,能够进一步提高设计自由度。
[0167]
需要说明的是,图像倍率k2能够根据现有技术在光学单元446中根据构成变形棱镜对的棱镜442以及444的几何形状以及配置来决定。同样地,规定通过具有光学单元446而形成的实质的天线元件416的位置的距离d,根据现有技术,可以根据图像倍率k2以及从天线元件116到棱镜442的距离等来决定。
[0168]
具体而言,本实施方式涉及的激光雷达装置400如以下那样进行动作。
[0169]
激光雷达装置400与上述的激光雷达装置100同样地进行动作,但转向控制单元432的动作与转向控制单元132不同。转向控制单元432针对x方向,与转向控制单元132同样地,为了使从txopa102经由光学单元446向空间送出的主瓣的x方向的偏转角α(转向角α)变化,控制移相器112,使得从各个天线元件116经由光学单元446射出的光的相位沿着x轴具有与上述偏转角α对应的线性相位倾斜,并且使该偏转角α在规定的转向角度范围内以规定的模式随时间变化。在此,与上述偏转角α对应的线性相位倾斜可以通过设定各个移相器122来实现,使得在从光分支器110的光输入端到各个天线元件116的输出端的各个光路径(各个通道)中产生的相移量遵循数学式(26)。
[0170]
[数学式26]
[0171]
在此,q是对于构成天线单元118的各个天线元件116,沿着该天线元件116的x轴的
位置从一端依次标注的索引,q=
‑
q、
…
、
‑
1、0、1、
…
、q。
[0172]
需要说明的是,以rxopa104的主瓣具有偏转角α的方式由移相器122产生的线性相位倾斜与激光雷达装置100的情况同样地由数学式(13)给出。
[0173]
与数学式(14)同样地,根据数学式(13)、(26),在与具有相同的索引值u的天线元件116以及126分别对应的各个通道中应该产生的相位以及满足数学式(27)。
[0174]
[数学式27]
[0175]
即,在rxopa104的各个通道中产生的相移需要设为在txopa102的各个通道中产生的相移的p
r
/(k2·
p
t
)倍。
[0176]
需要说明的是,在本实施方式中,激光雷达装置400使用具有彼此不同的排列间距p
t
以及p
r
的txopa102以及rxopa104来构成,但并不限定于此。在激光雷达装置400中,只要满足数学式(22),排列间距p
t
以及p
r
也可以是相同的值。即,激光雷达装置300也能够代替txopa102以及rxopa104而使用各个天线元件的排列间隔相同的txopa以及rxopa来构成。
[0177]
需要说明的是,本发明并不限定于上述各个实施方式的结构,在不脱离其主旨的范围内能够以各种方式来实施。
[0178]
例如,在上述各个实施方式中,txopa102的天线元件116以及rxopa104的天线元件126在xy平面内沿x方向以及y方向以相同的排列间距p
t
以及p
r
排列,但并不限定于此。txopa102的天线元件116以及rxopa104的天线元件126也可以构成为x方向和y方向的排列间距不同。
[0179]
在该情况下,关于x方向以及y方向的各个方向,通过使txopa102向空间送出的相邻的衍射光相互所成的第一角度与rxopa104中的该空间中的相邻的极大灵敏度方向相互所成的第二角度不同,能够在不缩小上述x方向以及y方向的排列间距的情况下,使txopa102的主瓣的x方向以及y方向上的转向角度的允许范围同时扩大。
[0180]
具体而言,考虑到能够设置于txopa102的光射出部以及rxopa104的光接收部的光学部件的图像倍率,通过设定为txopa102以及rxopa104的实质的天线元件的排列间距彼此不同(例如它们的比由互质的自然数表示),能够扩大txopa102的主瓣的转向角度的允许范围。
[0181]
另外,在上述各个实施方式中,为了方便起见,对txopa102以及rxopa104使用具有相反性的opa而构成的情况进行了说明,但并不限定于此。例如,rxopa104可以是光从天线元件126向一个方向传播到光耦合器120的光输出端的元件。在该情况下,对于从各个天线元件126到光耦合器120的光输出端的各个通道,考虑在虚拟地向反方向传播光的情况下的虚拟的衍射光来定义极大灵敏度方向,能够使用与上述的各个实施方式相同的结构来扩大光束转向的范围。
[0182]
另外,在上述各个实施方式中,作为一个例子,txopa102以及rxopa104使用专利文献1所示的opa700来构成,但并不限定于此。作为其他例子,例如,也能够使用非专利文献1所公开的那样的opa900来构成txopa102以及rxopa104。具体而言,例如,能够通过使光栅基座的天线元件的延伸方向与图1中的y方向一致,使各个天线元件在图1的x方向上排列,从而构成txopa102以及rxopa104。在该情况下,将txopa102以及rxopa104中的上述天线元件的排列间距分别设为p
t
以及p
r
,对于x方向的光束转向,能够通过与上述的各个实施方式相
同的结构来扩大光束转向的允许角度范围。
[0183]
另外,在第二以及第三实施方式中,构成图像转换光学系统的光学单元346以及446分别具有大于1的图像倍率k1、k2而描绘了图3以及图4,但并不限定于此。图像倍率k1、k2也可以具有小于1的值。另外,图像转换光学系统只要具有至少在一维方向上进行图像转换的功能,则能够使用任意的光学系统。
[0184]
如以上说明的那样,本发明的实施方式涉及的激光雷达装置100等具备作为由光学相控阵构成的光发送器的txopa102。txopa102将由从作为构成该光学相控阵的多个第一天线元件的天线元件116输出的光生成的衍射光向空间送出。另外,激光雷达装置100等具备作为由光学相控阵构成的光接收器的rxopa104。rxopa104通过作为构成该光学相控阵的多个第二天线元件的天线元件126来接收从空间到来的光。另外,在激光雷达装置100等中,作为光接收器的rxopa104关于从空间到来的光的方向,具有多个该光的接收灵敏度变得极大的极大灵敏度方向。另外,在激光雷达装置100等中,作为光发送器的txopa102向空间送出的相邻的衍射光的方向相互所成的第一角度与作为光接收器的rxopa104中的相邻的上述极大灵敏度方向相互所成的第二角度彼此不同。
[0185]
根据该结构,从txopa102向空间送出的与主瓣相邻的旁瓣的反射返回光在rxopa104中被抑制并被输出。因此,在激光雷达装置100等中,能够在不增加成本的情况下,克服由txopa102的天线元件116的排列间距p
t
决定的相邻衍射光之间的角度间隔引起的光束转向角度范围的限制,实现更宽的光束转向角度范围。
[0186]
另外,激光雷达装置100等具备作为相移控制部的转向控制单元132等,控制作为构成txopa102的光学相控阵所具备的第一移相器的移相器112,以及作为构成rxopa104的光学相控阵所具备的第二移相器的移相器122。另外,作为相移控制部的转向控制单元132等,控制作为第一移相器的移相器112的相移量,使作为光发送器的txopa102向空间送出的衍射光的主瓣的送出方向变化。另外,作为相移控制部的转向控制单元132等控制作为第二移相器的移相器122的相移量,使得上述极大灵敏度方向中具有最大灵敏度的极大灵敏度方向与txopa102的上述主瓣的送出方向一致。
[0187]
根据该结构,能够始终将针对从txopa102的主瓣的送出方向到来的反射返回光的rxopa104的接收灵敏度维持为最大。
[0188]
另外,在激光雷达装置100等中,作为第一天线元件的天线元件116的排列间隔p
t
和作为第二天线元件的天线元件126的排列间隔p
r
被设定为彼此不同的值。根据该结构,能够容易地使txopa102向空间送出的相邻的衍射光的方向相互所成的第一角度与rxopa104中的相邻的上述极大灵敏度方向相互所成的第二角度不同。
[0189]
另外,在激光雷达装置100等中,上述第一角度与上述第二角度之比被设定为由互质的自然数之比表示。根据该结构,例如数学式(11)所示,能够以由上述自然数决定的倍率扩大txopa102的光束转向的允许角度范围。
[0190]
另外,在激光雷达装置100等中,作为第一天线元件的天线元件116的排列间隔p
t
与作为第二天线元件的天线元件126的排列间隔p
r
之比被设定为以互质的自然数之比表示。根据该结构,能够容易地设定为上述第一角度与上述第二角度的比由互质的自然数之比表示。
[0191]
另外,在激光雷达装置300、400中,作为光发送器的txopa102将由从多个作为第一
天线元件的天线元件116输出的光生成的衍射光经由作为构成图像转换光学系统的第一光学部件的透镜342、344或棱镜442、444向空间送出。另外,在激光雷达装置300、400中,上述第一角度的定义为,经由上述第一光学部件向空间送出的相邻的衍射光之间的角度。
[0192]
根据该结构,除了txopa102的天线元件116的排列间距p
t
以及rxopa104的天线元件126的排列间距p
r
以外,还能够使用上述图像转换光学系统的图像倍率来设定上述第一角度,因此设计自由度提高。
[0193]
另外,在激光雷达装置300中,上述第一光学部件由作为两个凸透镜的透镜342、344构成。根据该结构,能够容易地构成图像转换光学系统。
[0194]
另外,在激光雷达装置400中,上述第一光学部件由构成变形棱镜对的两个棱镜442、444构成。根据该结构,能够容易地构成图像转换光学系统。
[0195]
另外,在激光雷达装置100等中,作为光接收器的rxopa104能够通过多个作为第二天线元件的天线元件126经由构成图像转换光学系统的第二光学部件来接收从空间到来的光。在该情况下,上述第二角度的定义为,关于经由上述第二光学部件接收的从上述空间到来的光,其在上述空间中规定的相邻的极大灵敏度方向相互所成的角度。根据该结构,能够进一步提高激光雷达装置100等的设计自由度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1