一种定位方法、系统、装置及其存储介质与流程
[0001]
本发明涉及物流领域,尤其是指一种定位方法、系统、装置及其存储介质。
背景技术:
[0002]
目前,对定位目标的定位方法一直是物流行业中重要的研究课题,比如定位目标可以理解为装载货物的穿梭车,以及其他的物流移动单元。现代物流中的仓储为了提高货物存储效率和拣选效率,要对定位目标进行多种空间位置和状态的定位控制,而传统的定位方式相对复杂或者多状态的定位判断则无法实现。
[0003]
所以发明人发现现有技术中至少存在如下问题,现有技术无法对于定位目标多种空间位置和状态进行定位,已经成为亟待解决的技术问题。
技术实现要素:
[0004]
本申请提供了一种定位方法,其目的在于,在复杂定位环境下通过多个预置识别装置对位置标记进行识别得到对应的识别结果,进而通过识别结果判断得出定位结果。
[0005]
该方法包括:
[0006]
通过定位目标上设置的多个预置识别装置对空间中的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果,其中,所述定位目标为进行定位的物体目标;
[0007]
根据不同预置识别装置对应的所述识别结果按照预定规则进行判断得到所述定位目标的定位结果。
[0008]
可选地,所述根据不同预置识别装置对应的所述识别结果按照预定规则得到所述定位目标的定位结果包括:
[0009]
根据不同预置识别装置对应的所述识别结果按预定方式分别转化为对应的多个预设编码;
[0010]
根据多个所述预设编码按照预定规则进行判断得到所述定位目标的定位结果。
[0011]
可选地,所述定位目标为沿轨道行驶的移动单元;
[0012]
所述通过定位目标上设置的多个预置识别装置对空间中的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果包括:
[0013]
通过设置在所述移动单元上的多个预置识别装置对设置在所述轨道上的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果。
[0014]
可选地,所述轨道包括升降轨道和移动轨道,所述升降轨道位于所述移动轨道的一端,且所述升降轨道升降到预定高度时与所述移动轨道相接,以使所述移动单元在所述升降轨道和所述移动轨道相接后可在所述移动轨道与所述升降轨道上移动,其中,所述位置标记包括停泊位置标记和升降位置标记,所述移动轨道上沿所述移动单元的移动方向划分有至少一个停泊位,在每个所述停泊位上设置有至少一个所述停泊位置标记,所述升降轨道上设置有所述升降位置标记,多个所述预置识别装置包括第一预置识别装置和第二预置识别装置;
[0015]
所述通过设置在所述移动单元上的多个预置识别装置对设置在所述轨道上的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果包括:
[0016]
通过所述第一预置识别装置识别所述升降位置标记,且通过所述第二预置识别装置识别所述停泊位置标记分别得到对应的识别结果;
[0017]
所述根据不同预置识别装置对应的所述识别结果按照预定规则进行判断得到所述定位目标的定位结果包括:
[0018]
将根据所述第一预置识别装置对应的所述识别结果判断所述移动单元是否位于所述升降轨道,以及根据所述第二预置识别装置对应的所述识别结果判断所述移动单元的停泊位置作为所述定位结果。
[0019]
本申请还提供了另一种定位方法,
[0020]
每个所述停泊位置标记包括第一停泊位置标记和第二停泊位置标记,所述第一停泊位置标记和第二停泊位置标记沿所述移动单元的行驶方向相邻设置在所述移动轨道上,多个所述预置识别装置还包括第三预置识别装置,所述第三预置识别装置用于识别所述停泊位置标记,且所述第二预置识别装置与所述第三预置识别装置沿所述移动单元的行驶方向相邻设置在所述移动单元上,所述第一停泊位置标记和第二停泊位置标记之间的距离大于所述第二预置识别装置与所述第三预置识别装置之间的距离;
[0021]
所述通过设置在所述移动单元上的多个预置识别装置对设置在所述轨道上的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果还包括:
[0022]
所述第二预置识别装置和所述第三预置识别装置分别识别所述第一停泊位置标记和所述第二停泊位置标记得到识别结果;
[0023]
所述根据不同预置识别装置对应的所述识别结果按照预定规则进行判断得到所述定位目标的定位结果包括:
[0024]
将根据所述第二预置识别装置和所述第三预置识别装置识别的识别结果判断所述移动单元与所述停泊位的相对位置作为所述定位结果。
[0025]
本申请还提供了一种定位系统,该系统包括:控制系统和多个预置识别装置;
[0026]
所述控制系统,用于通过定位目标上设置的多个预置识别装置对空间中的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果,其中,所述定位目标为进行定位的物体目标,还用于根据不同预置识别装置对应的所述识别结果按照预定规则进行判断得到所述定位目标的定位结果。
[0027]
可选地,所述控制系统还用于根据不同预置识别装置对应的所述识别结果按预定方式分别转化为对应的多个预设编码,根据多个所述预设编码按照预定规则进行判断得到所述定位目标的定位结果。
[0028]
可选地,该系统还包括轨道,其中:
[0029]
所述定位目标为移动单元,所述移动单元沿所述轨道行驶,所述移动单元上设置多个所述预置设备装置,所述位置标记设置在所述轨道上;
[0030]
所述控制系统,还用于通过设置在所述移动单元上的多个预置识别装置对设置在所述轨道上的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果。
[0031]
可选地,所述轨道包括升降轨道和移动轨道,所述升降轨道位于所述移动轨道的一端,且所述升降轨道升降到预定高度时与所述移动轨道相接,以使所述移动单元在所述
升降轨道和所述移动轨道相接后可在所述移动轨道与所述升降轨道上移动,其中,所述位置标记包括停泊位置标记和升降位置标记,所述移动轨道上沿所述移动单元的移动方向划分有至少一个停泊位,在每个所述停泊位上设置有至少一个所述停泊位置标记,所述升降轨道上设置有所述升降位置标记,多个所述预置识别装置包括第一预置识别装置和第二预置识别装置;
[0032]
所述控制系统,还用于通过第一预置识别装置识别所述升降位置标记,且通过第二预置识别装置识别所述停泊位置标记分别得到对应的识别结果;还用于将根据所述第一预置识别装置对应的所述识别结果判断所述移动单元是否位于所述升降轨道,以及根据所述第二预置识别装置对应的所述识别结果判断所述移动单元的停泊位置作为所述定位结果。
[0033]
可选地,每个所述停泊位置标记包括第一停泊位置标记和第二停泊位置标记,所述第一停泊位置标记和第二停泊位置标记沿所述移动单元的行驶方向相邻设置在所述移动轨道上,多个所述预置识别装置还包括第三预置识别装置,所述第三预置识别装置用于识别所述停泊位置标记,且所述第二预置识别装置与所述第三预置识别装置沿所述移动单元的行驶方向相邻设置在所述移动单元上,所述第一停泊位置标记和第二停泊位置标记之间的距离大于所述第二预置识别装置与所述第三预置识别装置之间的距离;
[0034]
所述控制系统,还用于所述第二预置识别装置和所述第三预置识别装置识别所述第一停泊位置标记和所述第二停泊位置标记得到识别结果,还用于将根据所述第二预置识别装置和所述第三预置识别装置识别的识别结果判断所述移动单元与所述停泊位的相对位置作为所述定位结果。
[0035]
可选地,所述第一预置识别装置为镜反传感器,所述第二预置识别装置和第三预置识别装置均为漫反传感器,所述升降位置标记为反光膜,所述停泊位置标记为沿所述移动单元移动方向设置的长孔,所述长孔的两端分别作为所述第一停泊位置标记和第二停泊位置标记。
[0036]
如上可见,基于上述实施例,在复杂定位环境下通过多个预置识别装置对位置标记进行识别得到对应的识别结果,进而通过识别结果判断得出定位结果。解决了现有技术无法对于定位目标多种空间位置和状态进行定位的技术问题。
附图说明
[0037]
图1为本发明定位方法的流程100示意图;
[0038]
图2为本发明定位方法的流程200示意图;
[0039]
图3为本发明定位方法的流程300示意图;
[0040]
图4为本发明定位方法的流程400示意图;
[0041]
图5为本发明定位系统的结构示意图;
[0042]
图6为本发明第二预置识别装置和第三预置识别装置以及对应长孔的位置关系示意图;
[0043]
标记说明:
[0044]
1
ꢀꢀꢀꢀꢀ
移动单元
[0045]
2
ꢀꢀꢀꢀꢀ
第一预置识别装置
[0046]
3
ꢀꢀꢀꢀꢀ
第二预置识别装置
[0047]
4
ꢀꢀꢀꢀꢀ
第三预置识别装置
[0048]
5
ꢀꢀꢀꢀꢀ
升降位置标记
[0049]
6
ꢀꢀꢀꢀꢀ
接缝
[0050]
7
ꢀꢀꢀꢀꢀ
停泊位置标记
[0051]
71
ꢀꢀꢀꢀ
第一停泊位标记
[0052]
72
ꢀꢀꢀꢀ
第二停泊位标记
[0053]
8
ꢀꢀꢀꢀꢀ
升降轨道
[0054]
9
ꢀꢀꢀꢀꢀ
移动轨道
具体实施方式
[0055]
为使本发明的目的、技术方案及优点更加清楚明白,以下参照附图并举实施例,对本发明进一步详细说明。
[0056]
在一实施例中,在现代仓储中为了提高货物存储效率和拣选效率,采用轨道上行驶穿梭车的方式装载货品,其中轨道为多层并包括升降轨道和移动轨道。移动轨道的一端设置一段升降轨道用于穿梭车的上下升降,升降轨道升降到预定高度时便与移动轨道对接,穿梭车可以在升降轨道上进行升降,在移动轨道上会对应不同的位置设置有装载货物的设备或装置给穿梭车进行装载货物,也就是说如果把穿梭车理解为定位目标,那么它在轨道上会有多个位置需要进行定位,以便后续货物的装载或者利用升降轨道对穿梭车进行升降。在这种复杂的环境下,现有技术就无法实现对穿梭车进行定位。
[0057]
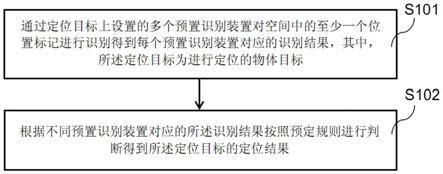
图1为本发明定位方法的流程100示意图。如图1所示,在一实施例中,提供了一种定位方法,该方法包括:
[0058]
s201,通过定位目标上设置的多个预置识别装置对空间中的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果,其中,所述定位目标为进行定位的物体目标;
[0059]
在本步骤中提供了一种识别定位目标的具体方法。具体来说,采用在定位目标上设置的多个预设识别装置对空间中的至少一个位置标记进行识别。需要指出的是多个预设识别装置会分别进行识别,得到对应的不同识别结果。
[0060]
s202,根据不同预置识别装置对应的所述识别结果按照预定规则进行判断得到所述定位目标的定位结果。
[0061]
在本步骤中根据不同预置识别装置对应的识别结果进行判断,需要指出的是,此时得到识别结果是通过不同预置识别装置得到的多个,那么多个识别结果不同的组合,及对应值的不同就可以得到不同的定位结果。
[0062]
在本实施例中提供了一种对定位目标进行定位的具体方法,首先通过多个不同的预置识别装置识别空间中的位置标记,通过对位置标记的识别得到多个识别结果。利用多个识别结果的不同组合方式对定位目标按照预定规则进行判断,最终得到定位目标的定位结果。此处的预定规则可以理解为多个识别结果不同组合和具体与不同定位结果的对应关系。
[0063]
图2为本发明定位方法的流程200示意图。如图2所示,在一实施例中,所述根据不
同预置识别装置对应的所述识别结果按照预定规则得到所述定位目标的定位结果包括:
[0064]
s201,根据不同预置识别装置对应的所述识别结果按预定方式分别转化为对应的多个预设编码;
[0065]
在本步骤中为了方便控制提供了一种将不同预置识别装置对应为预设编码的方法,因为预设识别装置往往识别的是模拟量,通过将模拟量转化为数字量后可以方便后续的预设编程和控制,需要指出的是,多个识别结果的分别转化除了会转化为多个预设编码外,预设编码的排列顺序也可以作为后续判断定位结果的依据。
[0066]
s202,根据多个所述预设编码按照预定规则进行判断得到所述定位目标的定位结果。
[0067]
在本步骤中根据多个预设编码的数值或者排列顺序对定位目标的定位结果进行判断。同上,预定规则可以理解为预设编码的数值或者排列顺序和定位结果的对应关系。
[0068]
在本实施例中提供了一种不同识别结果转化为对应多个预设编码后,对多个预设编码的数值和排列顺序进行判断得到定位目标定位结果的具体方法。
[0069]
在一实施例中,所述定位目标为沿轨道行驶的移动单元;
[0070]
所述通过定位目标上设置的多个预置识别装置对空间中的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果包括:
[0071]
通过设置在所述移动单元上的多个预置识别装置对设置在所述轨道上的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果。
[0072]
在本实施例中提供了一种移动单元在轨道上行驶,利用移动单元上设置的多个预置识别装置对轨道上设置位置标记识别,然后进行后续判断的具体方法。
[0073]
图3为本发明定位方法的流程300示意图,如图3所示,在一实施例中,所述通过设置在所述移动单元上的多个预置识别装置对设置在所述轨道上的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果包括:
[0074]
所述轨道包括升降轨道和移动轨道,所述升降轨道位于所述移动轨道的一端,且所述升降轨道升降到预定高度时与所述移动轨道相接,以使所述移动单元在所述升降轨道和所述移动轨道相接后可在所述移动轨道与所述升降轨道上移动,其中,所述位置标记包括停泊位置标记和升降位置标记,所述移动轨道上沿所述移动单元的移动方向划分有至少一个停泊位,在每个所述停泊位上设置有至少一个所述停泊位置标记,所述升降轨道上设置有所述升降位置标记,多个所述预置识别装置包括第一预置识别装置和第二预置识别装置;
[0075]
s301,通过第一预置识别装置识别所述升降位置标记,且通过第二预置识别装置识别所述停泊位置标记分别得到对应的识别结果;
[0076]
在本步骤中基于上述的移动轨道和升降轨道的结构设置,通过所述第一预置识别装置识别所述升降位置标记,通过所述第二预置识别装置识别所述停泊位置标记。
[0077]
s302,将根据所述第一预置识别装置对应的所述识别结果判断所述移动单元是否位于所述升降轨道,以及根据所述第二预置识别装置对应的所述识别结果判断所述移动单元的停泊位置作为所述定位结果。
[0078]
在本步骤中提供了一种可以识别出移动单元是否位于升降轨道上,以及移动单元停泊位置的定位方法,需要指出的是通过计数器对第二预置识别装置的识别结果进行计
数,在移动单元沿移动轨道进行移动时,第二预置识别装置每识别到一次所述停泊位置标记,计数器可以不断的叠加或递减的记录数值,通过计数器数值判断移动单元位于哪个停泊位。
[0079]
在本实施例中提供了一种基于上述结构的具体定位方法,首先通过第一预置识别装置识别升降位置标记,且通过第二预置识别装置识别停泊位置标记分别得到对应的识别结果,然后通过不同的识别结果按照预定规则判断移动单元的定位结果。具体来说,第一预置识别装置对应的识别结果判断移动单元是否位于升降轨道上,且根据第二预置识别装置对应的识别结果判断移动单元的停泊位作为定位结果。需要指出的是移动单元是否位于升降轨道,以及在移动轨道的停泊位是一个复合的定位结果,通过多个不同的预置识别装置进行分别识别,再根据不同的识别结果判断得到最终的定位结果才能实现对移动单元的定位。
[0080]
图4为本发明定位方法的流程400示意图,如图4所示,在一实施例中,每个所述停泊位置标记包括第一停泊位置标记和第二停泊位置标记,所述第一停泊位置标记和第二停泊位置标记沿所述移动单元的行驶方向相邻设置在所述移动轨道上,多个所述预置识别装置还包括第三预置识别装置,所述第三预置识别装置用于识别所述停泊位置标记,且所述第二预置识别装置与所述第三预置识别装置沿所述移动单元的行驶方向相邻设置在所述移动单元上,所述第一停泊位置标记和第二停泊位置标记之间的距离大于所述第二预置识别装置与所述第三预置识别装置之间的距离;
[0081]
所述通过设置在所述移动单元上的多个预置识别装置对设置在所述轨道上的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果还包括:
[0082]
s401,所述第二预置识别装置和所述第三预置识别装置分别识别所述第一停泊位置标记和所述第二停泊位置标记得到识别结果;
[0083]
本步骤中除了上述实施例中的第一预置识别装置和第二预置识别装置,还包括第三预置识别装置识别停泊位置标记,在本步骤中的停泊位置标记包括第一停泊位置标记和第二停泊位置标记。
[0084]
s402,根据所述第二预置识别装置和所述第三预置识别装置识别的识别结果判断所述移动单元与所述停泊位的相对位置作为所述定位结果。
[0085]
在本步骤中根据第二预置识别装置和第三预置识别装置对第一停泊位置标记和第二停泊位置标记的识别结果可以判断出移动单元与停泊位的相对位置。
[0086]
在本实施例中提供了一种定位移动单元与停泊位相对位置的具体方法,通过两个预置识别装置,即第二预置识别装置和第三预置识别装置对每个停泊位的第一停泊位置标记和第二停泊位置标记进行识别得到对应的识别结果,判断移动单元与停泊位相对位置,也就是说不但要判断出移动单元在哪个停泊位,还要判断出在停泊位的具体位置范围。
[0087]
工作过程和基本原理:
[0088]
以下基于上述的移动单元和轨道的结构对本申请进行进一步的解释说明,需要指出的是以下内容只是为了更好的理解本申请的举例,并非是对本申请的具体限定。
[0089]
图5为本发明定位系统的结构示意图,如图5所示,通过设置在所述移动单元上的多个预置识别装置对设置在所述轨道上的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果。
[0090]
其中,移动单元可以理解为在轨道上行驶的穿梭车,需要指出的是穿梭车并非一辆,但是对于每一辆穿梭车都可以通过本申请的方法进行定位。
[0091]
所述轨道包括升降轨道和移动轨道,升降轨道位于所述移动轨道的一端,且升降轨道升降到预定高度时与移动轨道相接,以使所述移动单元在所述升降轨道和所述移动轨道相接后可在所述移动轨道与所述升降轨道上移动,其中,位置标记包括停泊位置标记和升降位置标记,移动轨道上沿移动单元的移动方向划分有至少一个停泊位,在每个停泊位上设置有至少一个停泊位置标记,升降轨道上设置有升降位置标记,多个预置识别装置包括第一预置识别装置和第二预置识别装置;
[0092]
通过第一预置识别装置识别升降位置标记,且通过第二预置识别装置识别和第三预置识别装置识别停泊位置标记分别得到对应的识别结果;
[0093]
需要指出的是停泊位可以理解为移动轨道上不同装卸货物的定点位置,这些定点位置上会设置有自动化的装卸货物设备或工作人员,穿梭车在这些不同的定点位置上可以进行分拣装卸货物。
[0094]
第一预置识别装置识别升降位置标记可以简单理解为当穿梭车到达升降轨道时,用于识别升降位置标记,那么穿梭车可以将识别到升降位置标记作为识别结果。
[0095]
那么根据上面的描述穿梭车需要在不同的停泊位停泊,移动轨道上的停泊位可以为多个定点位置,通过第二预置识别装置可以对多个停泊位上的停泊位置标记进行识别,并通过内置计数器进行计数,比如,将未设置有升降轨道的移动轨道一端的第一个停泊位计数为1,随着穿梭车在移动轨道上行驶,每经过一个停泊位上的停泊位置标记都对计数进行累加,当穿梭车移动到移动轨道的另一端的最后一个停泊位置标记时,计数器假设累加到n,假设在与移动轨道另一端相接的升降轨道上再设置一个停泊位置标记,此时如果穿梭车停泊在升降轨道上,计数器可以将计数累加到n+1,另外计数器也可以将计数递减,比如当穿梭车反向行驶时,每次识别到停泊位置标记就可以对计数进行递减。
[0096]
将第一预置识别装置和第二预置识别装置分别的识别结果进行综合判断,得到穿梭车在轨道上具体的位置,以此实现定位。
[0097]
以下对根据不同预置识别装置对应的所述识别结果按预定方式分别转化为对应的多个预设编码进行对应的解释。
[0098]
每个停泊位置标记包括第一停泊位置标记和第二停泊位置标记,第一停泊位置标记和第二停泊位置标记沿移动单元的行驶方向相邻设置在移动轨道上,多个预置识别装置还包括第三预置识别装置,第三预置识别装置用于识别停泊位置标记,且第二预置识别装置与所述第三预置识别装置沿移动单元的行驶方向相邻设置在移动单元上,第一停泊位置标记和第二停泊位置标记之间的距离大于第二预置识别装置与第三预置识别装置之间的距离;
[0099]
比如,第一预置识别装置可以理解为镜反传感器,升降位置标记可以通过反光膜进行标记。第二预置识别装置可以理解为漫反传感器,而停泊位置标记可以通过孔来进行标记,第一停泊位置标记和第二停泊位置标记可以理解为一个长孔的两端。
[0100]
假设,如果在升降轨道上的升降位置标记与移动轨道之间设置一个停泊位置标记,并将停泊位置标记均设置为包括第一停泊位置标记和第二停泊位置标记的长孔结构,且当第一预置识别装置识别到升降位置标记时,第二预置识别装置与第三预置识别装置刚
好位于第一停泊位置标记和第二停泊位置之间。另外,为了更好的贴近一些应用场景,升降轨道和移动轨道之间会出现间隔接缝,也会影响第二预置识别装置和第三预置识别装置的识别结果。另外,需要指出的是,接缝的宽度应小于第一停泊位置标记和第二停泊位置标记之间的距离,接缝与停泊位置标记之间的距离应该大于第二预置识别装置与第三预置识别装置之间的距离且,同时也大于第一预置识别装置与第二预置识别装置或第三预置识别装置之间的距离,当第一预置识别装置识别到升降位置标记时,第二预置识别装置和第三预置识别装置均位于长孔中。
[0101]
于是我们进行如下定义:
[0102]
当第一预置识别装置(将其识别结果用a表示)识别到升降位置标记时,记为1,反之记为0。
[0103]
当第二预置识别装置(将其识别结果用b表示)与第三预置识别装置(将其识别结果用c表示)识别到停泊位置标记或接缝时,记为0,反之记为1。如果第一停泊位置标记和第二停泊位置标记为长孔的两端,可以理解为当第二预置识别装置与第三预置识别装置经过长孔时,记为0,在长孔外的范围记为1。
[0104]
于是穿梭车由第n个停泊位向升降轨道行驶时,预设编码的变化如下:
[0105]
第一状态,穿梭车的所有预置识别装置均未识别到对应的位置标记,则a=0,b=1,c=1。
[0106]
第二状态,当穿梭车的第二预置识别装置进入到长孔中,则a=0,b=0,c=1。
[0107]
第三状态,当穿梭车的第三预置识别装置进入到长孔中,则a=0,b=0,c=0。
[0108]
第四状态,当穿梭车的第二预置识别装置驶出长孔,则a=0,b=1,c=0。
[0109]
第五状态,当穿梭车的第三预置识别装置驶出长孔,则a=0,b=1,c=1。
[0110]
第六状态,当穿梭车的第二预置识别装置接触到接缝,则a=0,b=0,c=1。
[0111]
第七状态,当穿梭车的第二预置识别装置不再接触接缝,则a=0,b=1,c=1。
[0112]
第八状态,当穿梭车的第三预置识别装置接触到接缝,则a=0,b=1,c=0。
[0113]
第九状态,当穿梭车的第三预置识别装置不再接触接缝,则a=0,b=1,c=1。
[0114]
第十状态,当穿梭车的第二预置识别装置进入在升降轨道上的长孔时,则a=0,b=0,c=1。
[0115]
第十一状态,当穿梭车的第三预置识别装置进入在升降轨道上的长孔时,则a=0,b=0,c=0。
[0116]
第十二状态,当穿梭车的第一预置识别装置识别到升降位置标记时,则a=1,b=0,c=0。
[0117]
至此所有过程结束,程序认为穿梭车已经到升降轨道的指定位置,升降轨道可以由plc控制进行升降。
[0118]
综上可以看出,如此复杂的定位过程如果简单通过现有技术的方法,完全无法实现。需要指出的是除了预定编码的数值会对应不同的定位结果,预设编码排列的顺序,以及每个状态的预设编码排列方式均可以对应不同的定位结果。
[0119]
停泊位精度控制调整:
[0120]
图6为本发明第二预置识别装置和第三预置识别装置以及对应长孔的位置关系示意图,如图6所示,设要求精度为
±
m,第二预置识别装置和第三预置识别装置之间间距为
l1,矩形孔长度l,布置时调整l1的长度,使得第二预置识别装置和第三预置识别装置与长孔两端的距离均为m1,且m1≤m即可。
[0121]
在一实施例中,本申请还提供了一种定位系统,该系统包括:控制系统和多个预置识别装置;
[0122]
所述控制系统,用于通过定位目标上设置的多个预置识别装置对空间中的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果,其中,所述定位目标为进行定位的物体目标,还用于根据不同预置识别装置对应的所述识别结果按照预定规则进行判断得到所述定位目标的定位结果。
[0123]
在一实施例中,所述控制系统还用于根据不同预置识别装置对应的所述识别结果按预定方式分别转化为对应的多个预设编码,根据多个所述预设编码按照预定规则进行判断得到所述定位目标的定位结果。
[0124]
在一实施例中,该系统还包括轨道,其中:
[0125]
所述定位目标为移动单元1,所述移动单元1沿所述轨道行驶,所述移动单元1上设置多个所述预置设备装置,
[0126]
所述控制系统,还用于通过设置在所述移动单元1上的多个预置识别装置对设置在所述轨道上的至少一个位置标记进行识别得到每个预置识别装置对应的识别结果。
[0127]
在一实施例中,所述轨道包括升降轨道8和移动轨道9,所述升降轨道8位于所述移动轨道9的一端,且所述升降轨道8升降到预定高度时与所述移动轨道9相接,以使所述移动单元1在所述升降轨道8和所述移动轨道9相接后可在所述移动轨道9与所述升降轨道8上移动,其中,所述位置标记包括停泊位置标记7和升降位置标记5,所述移动轨道9上沿所述移动单元1的移动方向划分有至少一个停泊位,在每个所述停泊位上设置有所述停泊位置标记7,所述升降轨道8上设置有所述升降位置标记5,多个所述预置识别装置包括第一预置识别装置2和第二预置识别装置3;
[0128]
所述控制系统,还用于通过第一预置识别装置2识别所述升降位置标记5,且通过第二预置识别装置3识别所述停泊位置标记7分别得到对应的识别结果,还用于根据所述第一预置识别装置2对应的所述识别结果判断所述移动单元1是否位于所述升降轨道8上,且根据所述第二预置识别装置3对应的所述识别结果判断所述移动单元1的停泊位置作为所述定位结果。
[0129]
在一实施例中,每个所述停泊位置标记包括第一停泊位置标记71和第二停泊位置标记72,所述第一停泊位置标记71和第二停泊位置标记72沿所述移动单元1的行驶方向相邻设置在所述移动轨道9上,多个所述预置识别装置还包括第三预置识别装置4,所述第三预置识别装置4识别所述停泊位置标记7,且所述第二预置识别装置3与所述第三预置识别装置4沿所述移动单元1的行驶方向相邻设置在所述移动单元1上,所述第一停泊位置标记71和第二停泊位置标记72之间的距离大于或等于所述第二预置识别装置3与所述第三预置识别装置4之间的距离;
[0130]
所述控制系统,还用于所述第二预置识别装置3和所述第三预置识别装置4识别所述第一停泊位置标记71和所述第二停泊位置标记72得到识别结果,还用于根据所述第二预置识别装置3和所述第三预置识别装置4识别的识别结果判断所述移动单元1与所述停泊位的相对位置作为所述定位结果。
[0131]
在一实施例中,所述第一预置识别装置2为镜反传感器,所述第二预置识别装置3和第三预置识别装置4均为漫反传感器,所述升降位置标记5为反光膜,所述停泊位置标记7为沿所述移动单元1移动方向设置的长孔,所述长孔的两端分别作为所述第一停泊位置标记71和第二停泊位置标记72。
[0132]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1