一种雷达天线、雷达、无人机和设备的制作方法
1.本发明涉及雷达技术领域,尤其涉及一种雷达、雷达天线、无人机和设备。
背景技术:
2.随着无人机技术的发展,无人机广泛应用于植保、航拍等工作中,在其工工作过程中,无人机通过雷达测距避障,以实现无人机的自主飞行。
3.如图8所示为目前的雷达天线,如图8中a所示的雷达天线布局方式,雷达仅能获取可探测范围内目标的距离、速度;如图8中b所示的雷达天线布局方式,雷达可以获取可探测范围内目标距离、速度,同时获取角度,但无论图8中的a还是b,雷达所获取的目标信息仅是一个方向,不能获取其他方向目标信息。
4.目前雷达为了检测障碍物在水平方向和垂直方向上的信息,毫米波雷达主要采用天线相控阵技术或者采用机械转动方式驱动天线转动。天线相控阵技术需要在pcb板上设置较多的天线单元组阵,导致pcb板尺寸较大,并且毫米波频段的板材成本高,而采用机械转动方式驱动的天线,需要增加机械转动的控制部分,提高了难度,同时增加了系统稳定性的不确定性和系统的重量。
技术实现要素:
5.本发明实施例提出了一种雷达天线、雷达、无人机和设备,该雷达实现了物体的立体面检测,并且成本低。
6.第一方面,本发明实施例提供了一种雷达天线,包括:
7.介质基片;
8.至少两个阵列天线,设置于所述介质基片的表面上,每个阵列天线包括沿所述阵列天线的阵列方向间隔设置的多个天线,任意两个阵列天线的阵列方向具有一夹角;
9.雷达芯片,所述雷达芯片与所述阵列天线电连接。
10.可选地,每个阵列天线包括多个接收天线和多个发射天线,在每个阵列天线中,多个接收天线在阵列天线的阵列方向上间隔设置,多个发射天线在阵列天线的阵列方向上间隔设置。
11.可选地,在每个阵列天线中,接收天线在阵列方向上等间距或不等间距间隔设置,发射天线在阵列方向上等间距或不等间距间隔设置。
12.可选地,在每个阵列天线中,相邻两个接收天线的距离为雷达半波长的整数倍,相邻两个发射天线的距离为雷达信号半波长的整数倍。
13.可选地,在每个阵列天线中,在阵列方向上,多个接收天线和多个发射天线在同一直线上。
14.可选地,在每个阵列天线中,在阵列方向上,至少一个接收天线和至少一个发射天线在同一直线上,在垂直于阵列方向的方向上,至少一个接收天线和至少一个发射天线间隔设置。
15.可选地,在每个阵列天线中,在阵列方向上,多个接收天线在同一直线上。
16.可选地,每个阵列天线的接收天线的数量相等或不相等,每个阵列天线的发射天线的数量相等或不相等。
17.可选地,所述天线为微带天线或者喇叭天线。
18.可选地,所述天线包括至少一个天线阵子。
19.可选地,所述阵列天线的数量为2个。
20.可选地,所述两个阵列天线的阵列方向的夹角为90
°
。
21.第二方面,本发明实施例提供了一种雷达,该雷达包括本发明任意实施例所述的雷达天线。
22.第三方面,本发明实施例提供了一种无人机,该无人机包括本发明任一实施例所述的雷达。
23.第四方面,本发明实施例提供了一种设备,该设备包括本发明任一实施例所述的雷达。
24.本发明的雷达天线包括介质基片、设置于介质基片的表面上的至少两个阵列天线和雷达芯片,每个阵列天线包括沿阵列天线的阵列方向间隔设置的多个天线,任意两个阵列天线的阵列方向具有一夹角,雷达芯片与阵列天线电连接。本发明实施例中,由于任意两个阵列天线的阵列方向具有夹角,使得包含该雷达天线的雷达实现了两个方向上的检测,即实现了物体的立体面检测,并且不需要增加其他的机械结构即可实现物体的立体面检测,结构简单,节约了成本,降低了系统难度、系统稳定的不确定性以及系统的重量。
附图说明
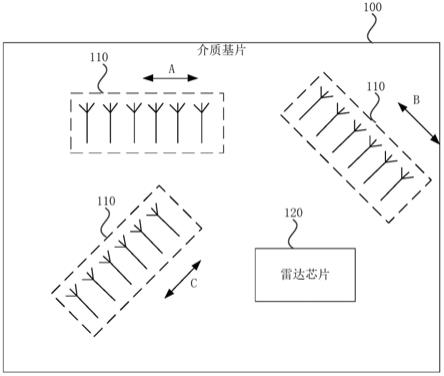
25.图1是本发明实施例提供的一种雷达天线中阵列天线的布局示意图;
26.图2是本发明实施例的阵列天线中天线之间位置关系的示意图;
27.图3a是本发明实施例提供的单阵子天线的结构示意图;
28.图3b是本发明实施例提供的4个阵子串联成的多阵子天线的结构示意图;
29.图3c是本发明实施例提供的4个阵子串联再并联3列的多阵子天线的结构示意图;
30.图4-图5是本发明实施例的阵列天线中天线的布局示意图;
31.图6-图7是本发明实施例的雷达天线中阵列天线的布局示意图;
32.图8是现有的雷达天线中阵列天线的布局示意图。
具体实施方式
33.为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面将结合附图对本发明实施例的技术方案作进一步的详细描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述
术语在本发明中的具体含义。
35.为了更好地理解本发明实施例,首先对本发明实施例所涉及到的雷达的角度分辨率的概念进行介绍,雷达的角分辨率是雷达能分辨出两个物体的最小角度,雷达的角分辨率越小,雷达的分辨物体的性能越好。
36.雷达的角分辨率的计算公式为其中,λ是波长,d是天线间距,n是雷达芯片在同一方向上的发射天线的数量与接收天线的数量的乘积,常取θ=0,即其中,n是雷达芯片在同一方向上的发射天线的数量与接收天线的数量的乘积。
37.图1是本发明实施例提供的一种雷达天线的示意图,如图1所示,本发明实施例的雷达天线包括介质基片100、至少两个阵列天线110和雷达芯片120。
38.在本发明实施例中,介质基片100可以是承载阵列天线100和雷达芯片120的载体,例如可以是各种pcb板,则阵列天线100可以是印刷于该介质基片上的天线。
39.阵列天线110可以是指包括发送天线和接收天线的、按照预设布局阵列而成的天线,每个阵列天线110具有一阵列方向,例如,阵列天线110中的多个天线平行间隔设置,则天线平行间隔设置的方向即为该阵列天线110的阵列方向。在本发明实施例中,阵列天线110的数量至少为2个,在实际应用中,阵列天线110的数量还可以为2个以上。
40.雷达芯片120可以是能够调制射频信号和对射频信号进行处理的处理器,在本发明实施例中,阵列天线110可以与雷达芯片120连接,例如,可以多个阵列天线110与一个雷达芯片120连接,也可以一个阵列天线110与一个雷达芯片120连接,本发明实施例对阵列天线110与雷达芯片120的连接方式不加以限制。
41.如图1所示,在本发明实施例中,多个阵列天线110设置于介质基片的表面上,每个阵列天线110包括沿阵列天线110的阵列方向间隔设置的多个天线,任意两个阵列天线110的阵列方向具有一夹角。具体地,各个阵列天线110的阵列方向如图1中a、b、c所示,在图1中,方向a、b、c中的任意两个阵列方向均具有一夹角,使得包含该雷达天线的雷达实现了至少两个方向上的检测,即实现了物体的立体面检测,并且不需要增加其他的机械结构即可实现物体的立体面检测,结构简单,节约了成本,降低了系统难度、系统稳定的不确定性以及系统的重量。
42.如图2所示,在本发明的可选实施例中,在每个阵列天线110中包括多个接收天线rx和多个发射天线tx,且在每个阵列天线110中,多个接收天线rx在阵列天线110的阵列方向a上间隔设置,多个发射天线tx在阵列天线110的阵列方向a上间隔设置。
43.如图3a-3c所示,接收天线和发射天线可以为单阵子天线、多个阵子串联形成的多阵子天线、多个多阵子天线并联形成的天线中的一种,如图3a为单阵子天线的结构示意图,图3b为4个阵子串联成的多阵子天线的结构示意图,图3c为4个阵子串联再并联3列的多阵子天线的结构示意图,图3a、图3b和图3c中的小方框代表阵子,该阵子可以为微带天线阵子或者喇叭天线阵子。
44.本发明示例以微带天线为示例,该微带天线可以是单振子天线或者多阵子天线,以天线为多阵子组成的天线为示例,则在本发明实施例中天线在同一直线上是指天线与馈
线形成的节点p在某个方向上在同一直线上,其中,馈线可以是天线与雷达芯片150连接的连接线。如图2中,3个接收天线(rx1、rx2、rx3)的节点p在第一方向a上在同一直线l上,间隔设置指的是天线与馈线形成的节点p在某个方向上具有一定距离,如图2中,两个发射天线(tx1和tx2)的节点p在第一方向a上具有距离d,或两个发射天线(tx1和tx2)的节点p在第二方向b上具有距离d,或者发射天线tx1的节点p与三个接收天线(rx1、rx2、rx3)的节点p在第二方向b上具有距离d。
45.在本发明的可选实施例中,在每个阵列天线110中,接收天线在阵列方向上等间距或不等间距间隔设置,发射天线在阵列方向上等间距或不等间距间隔设置,具体地,如图2所示,在每个阵列天线110中,相邻两个接收天线的距离为雷达半波长的整数倍,相邻两个发射天线的距离为雷达信号半波长的整数倍,示例性地,在图2中,接收天线rx1与接收天线rx2的距离可以为一个半波长d,接收天线rx2与接收天线rx3的距离可以为一个半波长d或者nd,其中n为正整数,优选地,接收天线在阵列方向上等间距设置,发射天线在阵列方向上等间距设置。
46.如图2所示,在本发明的可选实施例中,在每个阵列天线110中,在阵列方向a上,至少一个接收天线和至少一个发射天线在同一直线上,在垂直于阵列方向的方向b上,至少一个接收天线和至少一个发射天线间隔设置,具体地,以图2为示例,在阵列方向a上,发射天线tx2与接收天线(rx1、rx2、rx3)的节点p在同一直线l上,在方向b上,发射天线tx2与接收天线(rx1、rx2、rx3)的节点p间隔d,该距离d可以为雷达信号半波长的整数倍。
47.优选地,如图2所示,在每个阵列天线110中,在阵列方向a上,多个接收天线在同一直线上,即接收天线(rx1、rx2、rx3)的节点p在同一直线l上,而在发射天线中,在垂直与阵列方向a的方向b上,发射天线tx2的节点p与接收天线(rx1、rx2、rx3)的节点p间隔设置,发射天线tx1的节点p与接收天线(rx1、rx2、rx3)的节点p在同一直线上,以此形成在阵列方向a上,至少一个接收天线和至少一个发射天线在同一直线上,在垂直于阵列方向的方向b上,至少一个接收天线和至少一个发射天线间隔设置。
48.在实际应用中,还可以通过如图4所示的天线布局方式构成在阵列方向a上,至少一个接收天线和至少一个发射天线在同一直线上,在垂直于阵列方向的方向b上,至少一个接收天线和至少一个发射天线间隔设置,当然,在实际应用中,还可以通过其他天线排布方式形成在阵列方向a上,至少一个接收天线和至少一个发射天线在同一直线上,在垂直于阵列方向的方向b上,至少一个接收天线和至少一个发射天线间隔设置,本发明实施例对此不加以限制。
49.如图5所示,在本发明的优选实施例中,在每个阵列天线110中,在阵列方向a上,多个接收天线(rx1、rx2、rx3)和多个发射天线(tx1和tx2)在同一直线上,即在阵列方向a上,各个天线与馈线的节点p在同一直线l上,进一步地,多个接收天线(rx1、rx2、rx3)等间距间隔设置,优选地间隔雷达信号半波长的距离。
50.更优选地,如图6所示,阵列天线110的数量为2个,并且两个阵列天线110的阵列方向的夹角为90
°
,具体地,如图6所示,在图6中的雷达天线包括2个阵列天线,并两个阵列天线的阵列方向相互垂直呈90
°
,使得雷达天线可以检测相互垂直的两个方向的信息以形成物体的立体信息。
51.在本发明的另一可选实施例中,每个阵列天线110的接收天线的数量相等或不相
等,每个阵列天线110的发射天线的数量相等或不相等,即在雷达天线包含的多个阵列天线110中,各个阵列天线所包含的接收天线的数量可以相同也可以不相同,包含的发射天线的数量可以相同也可以不相同,如雷达天线包括2个阵列天线110,这两个阵列天线110均为3个接收天线和2个发射阵列天线阵列而成(如图6所示),当然,也可以是一个阵列天线110包括3个接收天线和2个发射天线,另一个阵列天线包括3个接收天线和3个发射天线(如图7所示),本发明实施例对雷达天线中每个阵列天线的接收天线和发射天线的数量不加以限制。
52.另外,在本发明实施例中,在雷达天线包含的多个阵列天线110中,各个阵列天线110中天线的排布方式可以相同(如图6所示),也可以不相同(如图7所示),本发明实施例对此亦不加以限制。
53.本发明实施例中,由于任意两个阵列天线的阵列方向具有夹角,使得包含该雷达天线的雷达实现了两个方向上的检测,即实现了物体的立体面检测,并且不需要增加其他的机械结构即可实现物体的立体面检测,结构简单,节约了成本,降低了系统难度、系统稳定的不确定性以及系统的重量。
54.本发明实施例还提供一种雷达,该雷达包括本发明的雷达天线。
55.本发明实施例还提供了一种无人机,该无人机包括本发明实施例任意一种雷达。
56.本发明实施例还提供了一种设备,该设备包括本发明实施例任意一种雷达。可选地,该设备可以为有人驾驶汽车、有人驾驶轮船、无人驾驶汽车、无人驾驶轮船等等,即本发明实施例的设备可以是移动平台或者固定平台,有人驾驶或者无人驾驶平台,本发明实施例对此不加以限制。
57.在本说明书的描述中,参考术语“一实施例”、“示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。
58.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚器件,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以适当组合,形成本领域技术人员可以理解的其他实施方式。
59.以上结合具体实施例描述了本发明的技术原理。这些描述只是为了解释本发明的原理,而不能以任何方式解释为对本发明保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1