辅助定位柱以及自行走机器人的导航辅助系统的制作方法
[0001]
本申请涉及机器人导航技术领域,尤其涉及一种能提高导航雷达辨识度的辅助定位柱以及自行走机器人的导航辅助系统。
背景技术:
[0002]
现有技术中,使用激光雷达进行定位导航的自行走机器人,例如激光slam(simultaneous localization and mapping即时定位与地图构建)导航机器人,其定位效果易受到环境影响,比如对于场景中简单线条的圆柱体物体,立柱易被识别为垃圾桶或消防栓,这将会造成定位偏差。
[0003]
更具体讲,现有技术中根据飞行时间测距法(tof time of flight) 激光雷达的作用原理,即以一定频率向四周发射激光,通过计算激光在障碍轮廓表面反射回来的时间间隔,以此确定距离并构成点云,那么,障碍轮廓距离越近点云密度越高,轮廓辨识度越高与地图匹配的成功率越高,就越能准确定位。反之,距离越远点云密度越低,轮廓辨识度越低与地图匹配的成功率越低,就无法准确定位。
[0004]
现有技术中,为了便于激光slam导航的机器人精确对接,通常会将固定设施配置为有较高辨识度的轮廓结构。但是对于轮廓结构辨识度不足的固定设施则无法实现精确对接。另外在空旷环境中,激光slam 导航的机器人无法精确定位自身,因此在相关解决方案中不得不尽力避免出现空旷环境。
技术实现要素:
[0005]
为了解决现有技术中存在无法准确定位情形的技术问题,本申请提供了一种能提高导航雷达定位效率的辅助定位柱以及自行走机器人的导航辅助系统。
[0006]
第一方面,本申请提供了一种辅助定位柱,所述定位柱竖立地设置于支撑物,所述定位柱的柱身上具有多个用于提高导航雷达辨识度的轮廓特征部,所述轮廓特征部为棱角线条,各个所述轮廓特征部各自面向不同的方向。
[0007]
根据本申请的实施例,其中所述定位柱一体成型结构或装配式结构。
[0008]
根据本申请的实施例,其中所述定位柱为装配式结构,所述定位柱包括一个或多个拼装式柱身,多个拼装式柱身相互拼接为定位柱柱身。
[0009]
根据本申请的实施例,其中所述定位柱包括底撑与定位柱柱身,所述底撑包括底板与固定于所述底板上的固定柱,所述拼装式柱身具有与所述固定柱适配的套装孔,所述拼装式柱身以所述套装孔套于所述固定柱,以将所述拼装式柱身固定于所述底撑。
[0010]
根据本申请的实施例,其中所述拼装式柱身包括第一卡接端与第二卡接端,所述第一卡接端与所述第二卡接端是能相互配合卡接固定的卡合结构。
[0011]
根据本申请的实施例,其中所述拼装式柱身内具有多个空腔,其中部分的所述空腔内配置有一个或多个支撑肋。
[0012]
根据本申请的实施例,其中所述定位柱的柱身设置有标识区,所述标识区设置供
远程读取的导航信息标识。
[0013]
根据本申请的实施例,其中,多个所述拼装式柱身包括第一拼装式柱身与第二拼装式柱身,所述第一拼装式柱身的材质密度小于所述第二拼装式柱身的材质密度。
[0014]
根据本申请的实施例,其中所述第一拼装式柱身材质为海绵、泡棉、泡沫塑料材料或泡沫橡胶材料,以及/或者,所述第二拼装式柱身为金属、橡胶或塑料,以及/或者,所述第二拼装式柱身包括配重块。
[0015]
根据本申请的实施例,其中所述轮廓特征部为凸出于所述定位柱柱身表面的凸棱;或者,所述轮廓特征部为凹入所述定位柱柱身表面的凹棱。
[0016]
根据本申请的实施例,其中所述凸棱截面呈梯形、矩形或三角形,或者,所述凹棱截面呈梯形、矩形或三角形。
[0017]
根据本申请的实施例,其中所述拼装式柱身呈长方体形,所述轮廓特征部从四个角部向外凸出。
[0018]
第二方面,本申请提供了一种自行走机器人的导航辅助系统,包括多个如前所述的辅助定位柱。
[0019]
本申请实施例提供的上述技术方案与现有技术相比具有如下优点:本申请实施例提供的该辅助定位柱,可在空旷地面增加该定位柱后,机器人上的激光雷达扫描到定位柱轮廓后,能提高辨识速度与辨识率,从而根据辨识结果在导航数据中的相应障碍物轮廓进行比对,即可准确定位机器人自身。由于辅助定位柱面向多个方向上都有提高导航雷达辨识度的轮廓特征部,因此可以在任何方向上给机器人提供定位参照。
附图说明
[0020]
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施例,并与说明书一起用于解释本申请的原理。
[0021]
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0022]
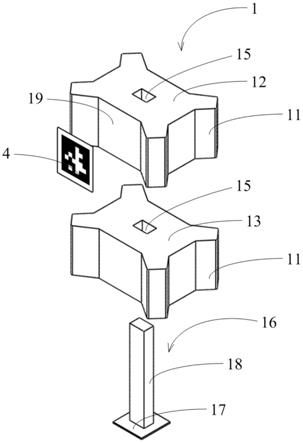
图1为本申请第一实施例提供的辅助定位柱结构分解示意图。
[0023]
图2为本申请第一实施例提供的辅助定位柱拼装式柱身结构示意图。
[0024]
图3为本申请第二实施例提供的辅助定位柱拼装式柱身底面结构示意图。
[0025]
图4为本申请第二实施例提供的辅助定位柱结构示意图。
[0026]
图5为本申请第三实施例提供的辅助定位柱拼装式柱身结构示意图。
[0027]
图6为本申请第三实施例提供的辅助定位柱的拼装式柱身底面结构示意图。
[0028]
图7为本申请第三实施例提供的辅助定位柱组合结构示意图一。
[0029]
图8为本申请第三实施例提供的辅助定位柱组合结构示意图二。
[0030]
图9为本申请实施例提供的导航辅助系统第一种工作方式示意图。
[0031]
图10为本申请实施例提供的导航辅助系统第二种工作方式示意图。
[0032]
1、定位柱;11、轮廓特征部;111、空腔;112、第一卡接端;113、第二卡接端;114、支撑肋;12、第一拼装式柱身;121、定位槽;13、第二拼装式柱身;15、套装孔;16、底撑;17、底板;18、固定柱; 19、标识区;2、机器人;21、激光雷达;3、固定设施;4、标识。
具体实施方式
[0033]
为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请的一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本申请保护的范围。
[0034]
为解决现有技术中的机器人导航准确性易受环境因素影响的问题,本申请实施例主要技术方向在于提供一种辅助定位柱,以提高导航雷达的辨识度,其中定位柱可竖立地设置于地面或其他支撑物上,定位柱的柱身上具有多个用于提高导航雷达辨识度的轮廓特征部,各个轮廓特征部各自面向不同的方向。本领域技术人员应该理解的是,用于提高导航雷达辨识度的轮廓特征部,是一种可以区别于常见的单线形、方形或圆形这些简单的常见形状的结构,比如在一些常见的柱体面上通过设置菱形、三角形、矩形或者梯形等截面形状的凹棱或凸棱,以便于在定位柱上增加更便于雷达准确地辨识出来的棱角线条。
[0035]
该辅助定位柱,可在空旷地面增加该定位柱后,机器人上的激光雷达扫描到定位柱轮廓后,能提高辨识速度与辨识率,从而根据辨识结果在导航数据中的相应障碍物轮廓进行比对,即可准确定位机器人自身。由于辅助定位柱面向多个方向上都有提高导航雷达辨识度的轮廓特征部,因此可以在任何方向上给机器人提供定位参照。
[0036]
下面将参照附图示例性地给出本申请的一些实施例。应当理解,参照的实施例并不限制本申请的范围。也就是说,本说明书中举出的任何实例都不是限制性的,而是仅仅是示例性的。
[0037]
图1为本申请第一实施例提供的辅助定位柱结构分解示意图,以及图2为本申请第二实施例提供的辅助定位柱拼装式柱身结构示意图。如图中示意,本实施例提供一种辅助定位柱1,定位柱1可竖立地设置于地面或其他支撑物上,定位柱1的柱身上具有多个用于提高导航雷达辨识度的轮廓特征部11,各个轮廓特征部11各自面向不同的方向。各个轮廓特征部11可以在周向上均匀公布,以便于在各个角度均可以有效辨识。
[0038]
举例来说,定位柱1可以是一体成型结构,定位柱1截面可选择为圆形、方形或椭圆形等常见柱体形状,也可以是由多件部件组装而成的柱体,其高度可根据需求变更。且定位柱1可选择为塑料或橡胶等柔性材料,以避免与机器人出现碰撞后发生损坏。
[0039]
而如图1中所示例,提出了一种装配式结构的定位柱1的实施例,装配式结构的定位柱1主要包括底撑16以及至少两个拼装式柱身,至少两个拼装式柱身装配连接于底撑16上进行固定,至少两个拼装式柱身可以通过螺丝等紧固件或卡扣等卡接结构快速拼接为定位柱1的柱身。
[0040]
而各个拼装式柱身上的轮廓特征部选择为能相互拼接成整条的结构形式,以便于拼接后组成柱身上完整的轮廓特征部,比如各个拼装式柱身模块的相同位置上配置有可以相互对接的凹棱或凸棱,以此拼接后各个轮廓特征部恰可拼为柱身上的一个整体的轮廓特征部。
[0041]
本申请实施例中,至少两个拼装式柱身包括第一拼装式柱身12与第二拼装式柱身13,第一拼装式柱身12的材质密度选择为小于第二拼装式柱身13的材质密度。以便于将定位柱1的重心落于底部,使得定位柱更不容易倾倒。
[0042]
本申请实施例中,第一拼装式柱身12材质可选择为海绵、泡棉、泡沫塑料材料或泡
沫橡胶材料等这些轻质材料,而第二拼装式柱身13 可选择为金属、橡胶或塑料等这些较重的材料;或者,也可以单独在第二拼装式柱身13内配置配重块,例如可以在第二拼装式柱身13内部加铅块。如以上实施例,可使得定位柱1成本低廉且便于快速生产的常用工业材质。并且以便于将定位柱1的重心尽量下压,使得定位柱1更稳定。
[0043]
本实施例中,针对机器人的导航雷达平面是由地面向上180mm高度的情形,一个定位柱选择为包括两个拼装式柱身模块,便可以满足辅助定位需求。可以理解的是,在雷达平面较高的情况下,还可以按需要配置更多数量的拼装式柱身模块。
[0044]
本申请实施例中,底撑16主要包括通过焊接连接为一体的底板17 与固定柱18,这里的固定柱18截面可呈长方形,且第一拼装式柱身 12与第二拼装式柱身13中部均具有与固定柱18适配的套装孔15,第一拼装式柱身12与第二拼装式柱身13能以套装孔15套于固定柱18 上,以将拼装式柱身固定于底撑16。同时,由于套装孔15的形状与固定柱18的长方形是可以套装配合关系,由于是非圆形的配合关系,所以可以达成防呆的效果,可以避免第一拼装式柱身12与第二拼装式柱身13将方向装错。
[0045]
其中底撑16可为一体成型的金属件,可以选择为铁、不锈钢、铝或钢这类较重的金属,以便于定位柱1的重心更向下,以保持稳定。而底板17可以面积较大的方形、圆形或椭圆形板件,底板17还可以配置有通孔,以便于利用膨胀螺丝等紧固件将底撑16固定于地面上,刚性连接于地面以获得较高的固定强度,可以避免定位柱1因碰撞而翻倒。
[0046]
本申请实施例中,定位柱1柱身上可以设置有标识区19,标识区 19可以是位于柱身上的平面,标识区19上可设置供远程读取的导航信息标识4,导航信息标识4比如含有导航信息的二维码等标识,可以利用机器人的视学系统进行识别读取。
[0047]
如图2示例的具体实施例中,轮廓特征部11选择为凸出于方形定位柱1柱身表面的凸棱。本申请实施例中,凸棱选择为截面呈梯形的形状。而拼装式柱身整体可概呈长方体形,而轮廓特征部11从四个角部反向于对角线方向向外凸出设置。以此形成一个可便于激光雷达可以准确辨识的形状,且可便于设置标识区。
[0048]
图1与图2的形状,换一个角度描述,轮廓特征部也可以认为是凹入方形定位柱柱身表面的倒梯形凹棱。凹棱为呈截面为倒梯形的凹棱,而拼装式柱身整体可呈长方体形,可认为轮廓特征部11是从四个侧面中部向内凹入形成。
[0049]
应该理解的是,本申请实施例中凸棱或凹棱的截面可选择为呈梯形、矩形或三角形,设置数量也并以此为限,可以是面向周围360度均匀配置和3个、4个、5个或6个等数量。利用本申请实施例提供的定位柱1,无需为各种固定设施定制足够具有辨识度的轮廓结构增添额外成本和研发生产周期,且定位柱1由于可移动,因此可以按照需要灵活配置。
[0050]
图3为本申请第二实施例提供的辅助定位柱拼装式柱身底面结构示意图以及图4为本申请第二实施例提供的辅助定位柱结构示意图。由图中所示例,定位柱1同样包括一个或多个拼装式柱身,而拼装式柱身可以是包括第一拼装式柱身12与第二拼装式柱身13。本实施例中与第一实施例的主要区别在于,这里的拼装式柱身底部配置有对应于底撑16的定位槽121,以便于底撑16的底板可以部分卡入定位槽121 中,以便于底撑16与装式柱身可进行快速固定。
[0051]
另一方面,本实施例中定位柱1包括三个拼装式柱身,其中包括上方的两个第一拼装式柱身12以及最下方的一个第二拼装式柱身13。
[0052]
图5为本申请第三实施例提供的辅助定位柱拼装式柱身结构示意图,以及图6为本申请第三实施例提供的辅助定位柱的拼装式柱身底面结构示意图。由图中所示例,定位柱1同样包括一个或多个拼装式柱身,而拼装式柱身可以是包括第一拼装式柱身12与第二拼装式柱身 13。本实施例中与第一实施例的主要区别在于,
[0053]
拼装式柱身内具有多个空腔111,其中可包括中部空腔111与侧边空腔111,中部空腔111可由中部的四个主要结构侧板围成,部分的侧边空腔111内选择配置有一个或多个斜撑的支撑肋114,在节省材料的同时还能保证结构强度。中部空腔111内可用于安装配重件等,配重件可通过螺杆或类似坚固件通过螺母与底部的通孔固定于中部空腔 111内。
[0054]
另一方面,本实施例中拼装式柱身包括第一卡接端112与第二卡接端113,所述第一卡接端112与所述第二卡接端113是能相互配合卡接固定的卡合结构,如此,可以定位柱1的各个拼装式柱身可以利用第一卡接端112与第二卡接端113与相邻拼装式柱身首尾卡接固定。而每个拼装式柱身可以均配置有底撑16,底撑16可以是多个一体成型于拼装式柱身底面上的凸出支脚,也可以是通过螺杆等紧固件固定于拼装式柱身底面上的凸出支脚。
[0055]
如图中示例,底撑16包括四个圆形的支脚,且四个圆形的支脚安装后的最外沿可与中部空腔111的顶沿定位卡接。而拼装式柱身的第一卡接端112可以是侧边空腔111的位于顶面的留空段,而第二卡接端113可以是凸出于拼装式柱身底面的凸出部,以便于第一卡接端112 与第二卡接端113通过凸凹配合进行卡接固定。
[0056]
图7为本申请第三实施例提供的辅助定位柱组合结构示意图一,本实施例中定位柱1包括两个拼装式柱身,其中包括上方的一个第一拼装式柱身12以及下方的一个第二拼装式柱身13。
[0057]
图8为本申请第三实施例提供的辅助定位柱组合结构示意图二,本实施例中定位柱1包括三个拼装式柱身,其中包括上方的两个第一拼装式柱身12以及最下方的一个第二拼装式柱身13。
[0058]
本申请另一方面,还可以认为是提供一种自行走机器人的导航辅助系统,包括多个如前所述的辅助定位柱1,以组成一个场景的导航辅助系统。其中主要包括多个辅助定位柱1、机器人2以及固定设施3。
[0059]
图9为本申请实施例提供的导航辅助系统第一种工作方式示意图,如图所示意,为便于机器人2与固定设施3精确对接,可在固定设施两侧增加定位柱1后,机器人2上的激光雷达21扫描到两侧的定位柱 1后便可识别为固定设施3,由固定设施3与定位柱1共同构成的固定设施系统,可以提供具有高辨识度的轮廓特征以精确对接。同时可以通过顶部的二维码识别该固定设施的相关信息。摆放时,可根据事先设计的摆放相对位置数据,在场地上准确测量,并将定位柱摆放得尽可能精确,以提高定位精度。
[0060]
图10为本申请实施例提供的导航辅助系统第二种工作方式示意图,在空旷环境辅助定位时,在空旷地面增加定位柱1后,机器人2 上的激光雷达21扫描到定位柱1,与slam数据地图上的相应障碍物轮廓进行比对,即可准确定位自身。由于定位柱1四面都有识别轮廓,因此可以在任何方向上给机器人提供定位参照。同时机器人2还可以通过顶部的标识4读取该空旷环境的相关信息。摆放方式:在机器人2 扫描环境建立slam数据地图前摆放在空旷区域合适位置,并确保机器人2扫描到其完整轮廓。
[0061]
需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一
个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0062]
以上所述仅是本申请的具体实施方式,使本领域技术人员能够理解或实现本申请。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本申请的精神或范围的情况下,在其它实施例中实现。因此,本申请将不会被限制于本文所示的这些实施例,而是要符合与本文所申请的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1