移动体定位系统和移动体定位方法与流程
[0001]
本发明涉及移动体定位系统和移动体定位方法
背景技术:
[0002]
——通过参考而引用——
[0003]
本申请要求2018年7月20日提交的日本专利申请第2018-137182号的优先权,通过参考其内容而引入本申请中。
[0004]
近年来,开发了能够使用全球导航卫星系统(global navigation satellite system;gnss)高精度地进行定位的各种定位方法。作为其代表性的定位方法,已知精密单点定位(precise point positioning;ppp),作为利用该精密单点定位的定位装置的例子,专利文献1中记载了一种单独定位装置,其根据使用从多个定位卫星发送的定位用信号得到的所述多个定位卫星各自与接收机的距离对该接收机的位置进行定位,其特征在于,包括:卫星信息检测单元,其根据所述定位用信号中包括的导航电文或者用离线处理预先推算的值观测所述定位卫星的轨道信息和卫星时钟误差;能够获取电离层延迟量信息的电离层延迟信息获取单元;能够获取对流层延迟量信息的对流层延迟信息获取单元;定位运算单元,其对于接收机位置使用过去的接收机位置推算结果和所述定位卫星的轨道信息进行线性近似,构成以未知数的线性近似的接收机位置、整数值偏差、接收机时钟误差、卫星时钟误差、电离层延迟量和对流层延迟量为解释变量,以观测值即载波相位、码伪距、卫星时钟误差、电离层延迟量信息和对流层延迟量信息为响应变量的回归方程,对该回归方程应用参数推算算法,由此至少对接收机位置进行推算运算。
[0005]
另外,作为利用精密单点定位的高精度的定位终端的例子,专利文献2中记载了一种卫星定位系统的定位终端,其特征在于:从广播gnss用的导航信号的多个人造卫星接收多个导航信号,并且从输出精密星历和修正信息和信息源获取精密星历和修正信息,在提高基于多个导航信号的定位的精度时,在通过持续观测使误差因素的各值收敛的处理过程中,从存储区域获取根据并非基于导航信号的已知参数推算的本终端位置的值,使用该推算出的各值作为持续观测的初始值和/或追加的一个值之后,至少使涉及模糊度的误差成分抵消地对本终端位置进行计算处理。
[0006]
现有技术文献
[0007]
专利文献
[0008]
专利文献1:日本专利第4146877号公报
[0009]
专利文献2:日本专利第5794646号公报
技术实现要素:
[0010]
发明要解决的课题
[0011]
以往,精密单点定位主要在测量和建筑等领域中利用。除此以外,近年来,在防灾减灾、环境保护等其他领域中的利用也在急速地进展。作为这样的新用途之一,可以举出机
动车和农业机械、建筑机械等移动体的自主行驶控制。
[0012]
移动体的自主行驶控制中,厘米级的高精度的定位数据总是不可或缺的。另一方面,精密单点定位中,通过使因接收机和定位卫星中搭载的时钟的精度、定位卫星的轨道的偏差、通过电离层和对流层时的载波的延迟等引起的定位误差在事后收敛,而生成高精度的定位数据。从而,在移动体的自主行驶控制中使用精密单点定位的情况下,要求即时性、即能够在短时间内使定位误差收敛的性能。关于这一点,专利文献2中记载的定位终端提高了即时性,但在终端刚起动后和卫星通信被隧道等遮蔽物屏蔽的状况下,不能对称为载波相位的定位卫星与移动体的距离的近似值进行修正,难以在短时间内使定位误差收敛。如果在上述情况下也能够在短时间内使定位误差收敛,则能够在移动体的自主行驶控制中使用精密单点定位。
[0013]
于是,本发明目的在于提供一种在精密单点定位中能够在短时间内使定位误差收敛的移动体定位系统和移动体定位方法。
[0014]
用于解决课题的技术方案
[0015]
用于达成上述目的的本发明的一个方式,是一种用于从定位卫星接收定位信号来测量移动体的位置坐标的移动体定位系统,其包括:车上装置,其基于从多个定位卫星接收的定位信号的载波相位来计算所述移动体的位置坐标;和地面管理装置,其响应来自所述车上装置的请求而对所述车上装置发送用于计算所述位置坐标的修正用数据,所述车上装置执行:第一处理序列,从所述定位卫星或所述地面管理装置获取所述定位卫星的精密轨道数据来进行精密单点定位运算,并且计算所述位置坐标;和第二处理序列,将关于从所述定位卫星中选择的定位卫星的伪距、载波和该移动体的所述位置坐标发送至所述地面管理装置,并从所述地面管理装置获取所述修正用数据来进行精密单点定位运算,并且计算所述位置坐标,在所述第二处理序列中,所述车上装置选择在所述第一处理序列中和所述第二处理序列中计算出的各所述位置坐标中的数据误差较小的一者的位置坐标,作为该移动体的位置坐标。
[0016]
另外,本发明的另一个方式是一种用于从定位卫星接收定位信号来测量移动体的位置坐标的移动体定位系统,其包括:车上装置,其基于从多个定位卫星接收的定位信号的载波相位来计算所述移动体的位置坐标;和地面管理装置,其响应来自所述车上装置的请求而对所述车上装置发送用于计算所述位置坐标的修正用数据,所述车上装置执行:第一处理序列,从所述定位卫星或所述地面管理装置获取所述定位卫星的精密轨道数据来进行精密单点定位运算,并且计算所述位置坐标;和第二处理序列,将由从所述定位卫星中选择的定位卫星得到的伪距、载波和该移动体的所述位置坐标发送至所述地面管理装置,并从所述地面管理装置获取由所述地面管理装置计算出的所述位置坐标,在所述第二处理序列中,所述车上装置将由从所述定位卫星中选择的定位卫星得到的所述伪距、所述载波、以及基于所述伪距或所述载波概略计算出的该移动体的位置坐标发送至所述地面管理装置,所述地面管理装置基于从所述车上装置接收到的所述伪距、所述载波和所述概略计算出的位置坐标来计算所述修正用数据,并使用所述修正用数据进行精密单点定位运算,计算所述位置坐标并将其发送至所述车上装置,所述车上装置选择在所述第一处理序列中和所述第二处理序列中计算出的各所述位置坐标中的数据误差较小的一者的位置坐标,作为该移动体的位置坐标。
[0017]
此外,本申请公开的课题及其解决方法将通过具体实施方式栏和附图说明。
[0018]
发明效果
[0019]
根据本发明,能够提供一种在精密单点定位中能够在短时间内使定位误差收敛的移动体定位系统和移动体定位方法。
附图说明
[0020]
图1是表示移动体定位系统1的硬件结构例的图。
[0021]
图2是举例示出构成车上装置102的分波装置220的功能模块的图。
[0022]
图3是举例示出构成车上装置102的gnss接收装置240的功能模块的图。
[0023]
图4是举例示出构成车上装置102的车辆控制装置260的功能模块的图。
[0024]
图5是举例示出构成地面服务器104的增强数据发布服务器420的功能模块的图。
[0025]
图6是举例示出构成地面服务器104的辅助数据发布服务器440的功能模块的图。
[0026]
图7是举例示出构成地面服务器104的管理服务器470的功能模块的图。
[0027]
图8是举例示出第一位置数据生成序列的处理流程的图。
[0028]
图9是示意性地表示观测数据的数据结构例的图。
[0029]
图10是举例示出观测数据生成处理的图。
[0030]
图11是举例示出观测数据选择处理的图。
[0031]
图12是示意性地示出辅助数据的数据结构例的图。
[0032]
图13是表示辅助数据生成处理的一例的图。
[0033]
图14是表示第一位置数据生成处理的一例的图。
[0034]
图15是举例示出第二位置数据生成序列的处理流程的图。
[0035]
图16是表示第二位置数据生成处理的一例的图。
[0036]
图17是示意性地表示推算车辆侧的时钟误差的方法的图。
[0037]
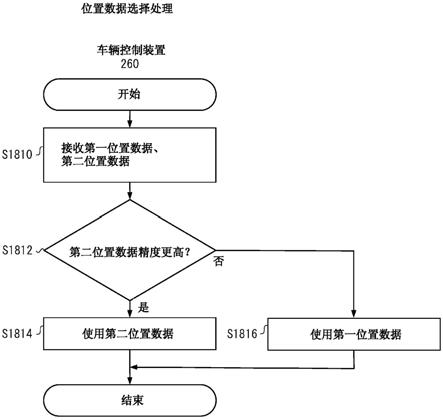
图18是表示位置数据选择处理的一例的图。
[0038]
图19是举例示出第二位置数据生成序列的处理流程的图。
[0039]
图20是表示第二位置数据生成处理的一例的图。
具体实施方式
[0040]
对于本发明的实施方式,参考附图在以下进行说明。其中,在用于说明的以下附图中,有时通过对于同一或类似的部分附加同一附图标记而省略重复的说明。另外,取决于附图,有时省略在说明时不需要的附图标记。
[0041]
本实施方式中,假设使用移动体定位系统进行自主的行驶控制的移动体是周知的自主行驶车辆(以下简称为“车辆”)进行说明。但是,本发明中的移动体的用途和功能不限定于此,只要具有对于物理地执行制动、变速、转向等操作的致动器、基于从传感器和天线接收到的定位数据指示适当的动作的控制装置,就可以是例如农业机械,也可以是建筑机械。
[0042]
——实施例1——
[0043]
<移动体定位系统进行的定位的概要>
[0044]
首先,对于移动体定位系统进行的定位的概要进行说明。移动体定位系统利用上
述称为精密单点定位的卫星定位技术,生成表示规定的三维正交坐标系(以下称为“大地坐标系”)中的车辆的位置坐标的数据(以下称为“位置数据”)。
[0045]
位置数据能够通过分别求出4个以上定位卫星与车辆之间的载波相位并计算其交点而生成。载波相位可以通过观测量位卫星发出定位信号时的载波的相位而求出。
[0046]
上述载波相位包括因各定位卫星的轨道、接收装置和定位卫星中使用的时钟的精度、通过电离层和对流层时产生的载波的延迟、载波的相位中包括的偏差等引起的误差。因此,移动体定位系统中,通过对这些误差进行修正而使载波相位精细化。以下将修正误差用的这些值的总称值称为修正值。
[0047]
移动体定位系统中,首先,(1)分别计算与4个以上定位卫星之间的伪距,求出以它们为半径的球面的交点而生成表示大致位置的数据(以下称为“粗略位置数据”)。然后,(2)根据粗略位置数据分别计算修正载波相位的修正值,(3)使用这些修正值进行载波定位,由此使定位误差收敛,生成位置数据。以下,将上述(1)(2)(3)的处理合称为精密单点定位运算。另外,以下为了简化说明,而省略上述(1)中的关于基于伪距生成粗略位置数据的运算处理的说明。
[0048]
移动体定位系统依据以itrf2008(international terrestrial reference frame 2008)为大地坐标系的jgs2011(japan satellite navigation geodetic system 2011)进行精密单点定位。但是,移动体定位系统依据的大地坐标系例如也可以是wgs84(world geodetic system 1984)或pe90.11(parameters of the earth 1990)等其他大地坐标系。
[0049]
移动体定位系统使用以下运算装置进行精密单点定位运算,生成定位对象的车辆的位置数据。
[0050]
<关于移动体定位系统1>
[0051]
首先,对于移动体定位系统1的物理结构进行说明。在图1中示意性地示出移动体定位系统1的硬件结构的一例。如图1所示,在移动体定位系统1中对于由设置在地面的多个通用服务器构成的服务器装置(以下也称为“地面服务器104”),经由互联网108连接多个车辆的车上装置102a、102b、102c
……
102n(以下在总称时和并不特别区分时总称为“车上装置102”)。本实施方式中的车上装置102设想为车载用的通用计算机。车上装置102可以是膝上型pc等通用计算机,也可以是包括智能手机或平板等便携设备的结构。车上装置102与互联网等通信网络108无线地连接。另外,地面服务器104与互联网108经由周知的通信用设备(以下也称为“通信装置106”)有线地连接,但也可以无线地连接。对于使用移动体定位系统1的各车辆,预先赋予对其分别唯一识别用的id即使用者id。地面服务器104对各车辆的车上装置102提供定位数据或对定位数据进行修正的修正数据。
[0052]
另一方面,监视台114是设置在能够接收来自定位卫星100的定位信号的地区,为了推算各定位卫星100的精密的轨道和时刻,而接收并收集定位信号,并且进行信号品质的验证的地面设备。各定位卫星100的轨道数据等信息经由通信网络108被发送至所述地面服务器104。
[0053]
接着,对于移动体定位系统1的功能结构进行说明。在图2~4中示出车上装置102的功能模块的一例。另外,在图5~7中示出地面服务器104的功能模块的一例。如图2~7所示,移动体定位系统1包括主要由分波装置220、gnss接收装置240和车辆控制装置260构成
的车上装置102,以及主要由增强数据发布服务器420、辅助数据发布服务器440和管理服务器470构成的地面服务器104。车上装置102和地面服务器104的各构成要素如上述图1举例所示,由包括cpu(central processing unit)和各种协处理器等运算器10、存储器20、进行数据的输入输出用的输入输出装置30、硬盘驱动器(hdd)、半导体驱动器(ssd)等存储40、将它们连接的有线或无线的通信线路的硬件,以及在存储40中保存的、对运算器10提供处理命令的软件实现。计算机程序可以由设备驱动程序、操作系统、位于其上层的各种应用程序、以及对这些程序提供共用功能的库构成。以下说明的各模块并不是硬件单位的结构,而是表示功能单位的模块。
[0054]
车上装置102可以是包括膝上型pc等通用计算机和其中安装的网络浏览器的结构,地面服务器104可以是包括网络服务器的结构。另外,也可以与周知的车辆导航系统一体地设置。
[0055]
<车上装置102的结构例>
[0056]
车上装置102包括分波装置220、gnss接收装置240和车辆控制装置260。
[0057]
(分波装置220)
[0058]
如图2所示,分波装置220包括通信部222、数据处理部224和数据保存部236。
[0059]
通信部222经由车上装置102的内部配线负责与gnss接收装置240和车辆控制装置260的通信处理。数据保存部236保存各种数据。数据处理部224基于经由gnss天线112从定位卫星100获取的定位信号和数据保存部236中保存的数据执行各种处理。gnss天线112是从定位卫星100接收定位信号用的卫星通信用的天线装置。
[0060]
数据处理部224包括模拟信号
→
数字信号转换部226、码相关部228、导航电文解调部230、伪距运算部232和观测数据发送部234。
[0061]
模拟信号
→
数字信号转换部226将模拟信号的定位信号变换为数字信号。另外,以下,将模拟信号的定位信号称为模拟定位信号,将变换为数字信号后的定位信号称为数字定位信号。码相关部228进行数字定位信号中包括的伪随机噪声(pseudorandom noise;prn)码、与复制码数据保存部238中保存的上述伪随机噪声码的复制的相关运算。由此来确定发送该模拟定位信号的定位卫星100。导航电文解调部230对从定位卫星100接收的导航电文进行解调。导航电文是对于关于定位卫星100的轨道信息的数据按伪随机噪声码相位调制而成的。伪距运算部232计算定位卫星100与本车之间的伪距。观测数据发送部234将在定位信号的载波上叠加表示伪距的数据等而成的观测数据经由通信部222发送至车辆控制装置260。观测数据的详情将与图9~图11关联地在后文中叙述。数据处理部224也发挥通信部222和数据保存部236的接口的功能。
[0062]
数据保存部236包括复制码数据保存部238。复制码数据保存部238保存伪随机噪声码的复制码数据。复制码数据是车上装置102使用的从定位卫星发送的导航电文(伪随机噪声码)的复制,被用于通过码相关部228中的相关运算来识别从接收的导航电文的发送源的定位卫星的接收时间。
[0063]
(gnss接收装置240)
[0064]
如图3所示,gnss接收装置240包括通信部242、数据处理部244和数据保存部254。
[0065]
通信部242经由车上装置102的内部配线负责与分波装置220和车辆控制装置260的通信处理。数据保存部254保存各种数据。数据处理部244基于由通信部242获取的数据和
数据保存部254中保存的数据执行各种处理。数据处理部244也发挥通信部242和数据保存部254的接口的功能。
[0066]
数据处理部244包括定位信号接收部246、辅助数据接收部248、精密单点定位运算部250和精密单点定位运算结果发送部252。
[0067]
定位信号接收部246经由通信部242从分波装置220接收模拟定位信号并转换为数字信号。辅助数据接收部248经由通信部242从后述的辅助数据发布服务器440接收被称为辅助数据的用于修正载波相位的修正用数据。精密单点定位运算部250进行精密单点定位运算,生成表示位置坐标的位置数据。将精密单点定位运算部250生成的位置数据称为第一位置数据。精密单点定位运算结果发送部252经由通信部242将第一位置数据发送至车辆控制装置260。
[0068]
数据保存部254包括定位信号数据保存部256、复制码数据保存部257、辅助数据保存部258和精密单点定位运算结果数据保存部259。
[0069]
定位信号数据保存部256将数字定位信号作为数据保存。复制码数据保存部257保存伪随机噪声码的复制码数据。辅助数据保存部258保存从辅助数据发布服务器440接收到的辅助数据。精密单点定位运算结果数据保存部259保存精密单点定位运算部250生成的第一位置数据。
[0070]
(车辆控制装置260)
[0071]
如图4所示,车辆控制装置260包括通信部262、数据处理部264和数据保存部278。
[0072]
通信部262经由车上装置102的内部配线负责与分波装置220和gnss接收装置240的通信处理。数据保存部278保存各种数据。数据处理部264基于由通信部262获取的数据和数据保存部278中保存的数据执行各种处理。数据处理部264也发挥通信部262和数据保存部278的接口的功能。
[0073]
数据处理部264包括观测数据发送部266、外部的精密单点定位运算结果接收部268、精密单点定位运算部270、收敛判断/定位选择部272、定位汇总部274和行驶轨道生成/车辆控制部276。
[0074]
观测数据发送部266经由通信部262将观测数据发送至辅助数据发布服务器440。外部的精密单点定位运算结果接收部268经由通信部262接收表示用gnss接收装置240或辅助数据发布服务器440进行的精密单点定位运算的运算结果的数据。精密单点定位运算部270进行精密单点定位运算,生成位置数据。将精密单点定位运算部270生成的位置数据称为第二位置数据。收敛判断/定位选择部272选择经由通信部262从gnss接收装置240的精密单点定位运算结果发送部252接收到的第一位置数据、和精密单点定位运算部270生成的第二位置数据中的任一者作为本车的位置数据。定位汇总部274通过将从收敛判断/定位选择部272接收到的位置数据和从车体中设置的各种传感器获取的定位数据汇总,来生成汇总定位数据。行驶轨道生成/车辆控制部276基于从定位汇总部274接收到的汇总定位数据生成行驶轨道数据,控制车辆的行驶。
[0075]
数据保存部278包括定位用补充数据保存部280和车辆控制用地图数据保存部282。定位用补充数据保存部280保存定位用补充数据、即经由通信部262从辅助数据发布服务器440的精密单点定位运算结果发布部454接收到的表示修正值的数据。车辆控制用地图数据保存部282保存车辆的行驶控制中使用的高精度地图数据。
[0076]
另外,以上按车上装置102的各功能由分波装置220、gnss接收装置240和车辆控制装置260这样相互连接的3台装置实现进行了说明,但该各功能也可以由1台装置一体地实现。
[0077]
<地面服务器104>
[0078]
地面服务器104包括增强数据发布服务器420、辅助数据发布服务器440和管理服务器470。
[0079]
(增强数据发布服务器420)
[0080]
如图5所示,增强数据发布服务器420包括通信部422、数据处理部424和数据保存部432。
[0081]
通信部422经由地面服务器104的内部配线负责与辅助数据发布服务器440和管理服务器470的通信处理。数据保存部432保存各种数据。数据处理部424基于由通信部422获取的数据和数据保存部432中保存的数据执行各种处理。数据处理部424也发挥通信部422和数据保存部432的接口的功能。
[0082]
数据处理部424包括精密轨道/时钟推算部426、增强数据生成部428和增强数据发布部430。
[0083]
精密轨道/时钟推算部426接收监视台114生成的观测数据,推算载波相位中包括的误差中的、因定位卫星100的时钟的精度、定位卫星100的轨道的偏差、载波的相位中包括的偏差而引起的误差。增强数据生成部428基于精密轨道/时钟推算部426的推算结果,生成被称为增强数据的数据。增强数据是表示对载波相位中包括的误差中的、因定位卫星100的时钟的精度、定位卫星100的轨道的偏差、载波的相位中包括的偏差引起的误差进行修正用的值的数据。增强数据发布部430经由通信部422将增强数据发布至辅助数据发布服务器440。
[0084]
数据保存部432包括监视台的观测数据保存部434。监视台的观测数据保存部434保存从监视台114获取的观测数据。从监视台114获取的观测数据,由定位卫星100与监视台114之间的伪距和载波、信号强度等构成。
[0085]
(辅助数据发布服务器440)
[0086]
如图6所示,辅助数据发布服务器440包括通信部442、数据处理部444和数据保存部458。辅助数据发布服务器440与用于与各车辆的车辆控制装置260a、260b、260c
……
260n(以下根据需要总称为“车辆控制装置260”)和监视台114进行通信的通信装置106连接,经由互联网108与这些装置进行各种数据的发送接收。
[0087]
通信部442经由地面服务器104的内部配线负责与增强数据发布服务器420和管理服务器470的通信处理。数据保存部458保存各种数据。数据处理部444基于由通信部442获取的数据和数据保存部458中保存的数据执行各种处理。数据处理部444也发挥通信部442和数据保存部458的接口的功能。
[0088]
数据处理部444包括各车辆的观测数据接收部446、增强数据接收部448、对流层/电离层延迟地区修正部450、精密单点定位运算部452、精密单点定位运算结果发布部454和辅助数据发布部456。
[0089]
各车辆的观测数据接收部446经由通信部442从车辆控制装置260接收各车辆生成的观测数据。增强数据接收部448经由通信部442从增强数据发布服务器420接收增强数据。
对流层/电离层延迟地区修正部450基于各车辆中的由将定位卫星100与gnss天线112以最短距离连接的线段与水平线构成的仰角来计算对流层和电离层中的载波的延迟量,根据其计算结果和增强数据生成辅助数据。精密单点定位运算部452使用辅助数据计算上述修正值。另外,使用计算出的修正值,对定位卫星100与定位对象的车辆之间的载波相位进行修正,通过载波定位计算第二位置数据。精密单点定位运算结果发布部454经由通信部442将表示精密单点定位运算部452计算得到的修正值的数据或第二位置数据发布至各车辆的车辆控制装置260。辅助数据发布部经由通信部442将辅助数据发布至各车辆的gnss接收装置240或车辆控制装置260。
[0090]
数据保存部458包括各车辆的观测数据保存部460和辅助数据保存部462。各车辆的观测数据保存部460保存从各车辆接收到的观测数据。辅助数据保存部462保存对流层/电离层延迟地区修正部450生成的辅助数据。
[0091]
(管理服务器470)
[0092]
如图7所示,管理服务器470包括通信部472、数据处理部474和数据保存部486。
[0093]
通信部经由地面服务器104的内部配线负责与增强数据发布服务器420和辅助数据发布服务器440的通信处理。数据保存部486保存各种数据。数据处理部474基于由通信部472获取的数据和数据保存部486中保存的数据执行各种处理。数据处理部474也发挥通信部472和数据保存部486的接口的功能。
[0094]
数据处理部474包括终端管理部476、认证收费部478、软件管理更新部480、运转监视部482和数据蓄积分析部484。
[0095]
终端管理部476管理各车辆与辅助数据发布服务器440之间的通信。认证收费部478从各车辆的车辆控制装置260接收表示上述使用者id的数据并进行认证,基于认证结果,对于使用移动体定位系统1a的各车辆的驾驶员收取使用费。软件管理更新部480进行掌管地面服务器104的各功能的软件的管理和更新。运转监视部482对移动体定位系统1a能够使用的、gps(global positioning system)或glonass(global navigation satellite system)等卫星定位系统中的定位卫星100的运转状况进行监视。数据蓄积分析部484对各服务器的数据保存部(432、458、486)中保存的各种数据的蓄积状况进行分析。
[0096]
数据保存部486包括终端数据保存部488、认证收费数据保存部490、软件数据保存部492、各车辆的观测数据保存部494、监视台的观测数据保存部496、增强数据保存部498和辅助数据保存部499。
[0097]
终端数据保存部488保存从各车辆获取的使用者id等终端数据。认证收费数据保存部490按每个车辆保存表示对各车辆赋予的使用者id的数据和表示收费状况的数据。软件数据保存部492保存掌管车上装置102和地面服务器104的各功能的软件所使用的各种数据。各车辆的观测数据保存部494保存从各车辆的车辆控制装置260接收到的观测数据。监视台的观测数据保存部496保存从监视台114接收到的观测数据。增强数据保存部498保存从增强数据发布服务器420接收到的增强数据。辅助数据保存部499保存从辅助数据发布服务器440接收到的辅助数据。
[0098]
本实施方式的管理服务器470如上所述具有移动体定位系统1的使用费用征收功能,但也能够采取关于这样的与定位系统的本质上的功能关系弱的功能、对外部系统委托其处理等的结构。另外,关于具体的费用收取功能与系统规格相应地适当设计即可。
[0099]
另外,以上按地面服务器104的各功能由增强数据发布服务器420、辅助数据发布服务器440和管理服务器470这样相互连接的3台服务器实现进行了说明,但这些功能也可以由1台服务器一体地实现。
[0100]
<伪距的修正与定位误差的收敛的关系>
[0101]
本实施方式的移动体定位系统1a,使用以上说明的构成要素进行精密单点定位运算,生成定位对象的移动体的第一位置数据和第二位置数据,并且选择生成的第一位置数据和第二位置数据中的任一者并对定位对象的移动体提供位置数据。
[0102]
如上所述,这些位置数据都是基于4个以上定位卫星(100a、100b、100c)与车辆之间的载波相位生成的。从而,载波相位的测量及其修正是移动体定位系统1a中的位置数据生成处理的核心。载波相位能够用以下观测方程表达。
[0103]
[式1]
[0104][0105]
(甲) (乙) (丙) (丁) (戊) (己) (庚) (辛)
……
式(1)
[0106]
上述观测方程中的各变量和常数的明细如下所述。
[0107]
载波相位观测值(左侧)
[0108]
伪距(右侧上部)
[0109]
(x
p
,y
p
,z
p
):定位卫星
[0110]
(x
u
,y
u
,z
u
):gnss天线
[0111]
修正值(右侧下部)
[0112]
c:光速(m/s)
……
常数
[0113]
δt
u
:接收装置时钟误差量(s)
……
(变量甲)
[0114]
δt
p
:卫星时钟误差量(s)
……
(变量乙)
[0115]
电离层延迟量(m)
……
(变量丙)
[0116]
对流层延迟量(m)
……
(变量丁)
[0117]
λ:载波波长(m/cycle)
……
常数
[0118]
载波相位偏差量(cycle)
……
(变量戊)
[0119]
phase windup效应量(cycle)
……
(观测值己)
[0120]
天线相位中心变动量(m)
……
(观测值庚)
[0121]
观测噪声
……
(不定值辛)
[0122]
在上述观测方程中,将载波相位作为观测值在左侧示出。另外,伪距在右侧上部、修正值在右侧下部分别示出。
[0123]
修正值如右侧下部所示,由(甲)接收装置(220、240)侧的时钟精度引起的、(乙)定位卫星100侧的时钟精度引起的、(丙)通过电离层时产生的载波的延迟引起的、(丁)通过对流层时产生的载波的延迟引起的、(戊)载波的相位的偏差引起的、(己)称为phase windup
效应的、定位卫星100的定位信号发送用天线与gnss天线112的相对位置关系的变化引起的、(庚)从gnss天线112的相位中心起的定位信号的入射位置的变动导致的、(辛)观测时的噪声引起的构成。
[0124]
位置数据可以通过解4个以上定位卫星(100a、100b、100c)与车辆之间的载波相位(观测方程)构成的联立方程而求出。
[0125]
关于上述误差因素分别求出修正值并进行修正,由此能够测量定位对象的车辆的、厘米级的准确的位置坐标。从而,以下以载波相位的修正为中心,说明移动体定位系统1a的运算处理。
[0126]
移动体定位系统1a用2个运算处理系统分别生成用上述观测方程表达的位置数据。以下,将用gnss接收装置240进行精密单点定位运算的系统称为第一位置数据生成序列,将用辅助数据发布服务器440和车辆控制装置260进行精密单点定位运算的系统称为第二位置数据生成序列。
[0127]
在图8中示出第一位置数据生成序列的一例。另外,在图15中示出第二位置数据生成序列的一例。此处,首先使用图8具体地说明第一位置数据生成序列。第二位置数据生成序列的说明将与图15关联地在后文中叙述。
[0128]
<第一位置数据的生成过程>
[0129]
如图8所示,第一位置数据是经过以下过程生成的。
[0130]
车上装置102接收定位卫星100发送的定位信号时(s810a),生成观测数据(s814),并发送至地面服务器104(s820)。接收了观测数据的地面服务器104生成增强数据和辅助数据(s826、s830),并将辅助数据发送至车上装置102(s832)。接收了辅助数据的车上装置102进行精密单点定位运算,生成第一位置数据(s834)。
[0131]
接着,使用图9~11说明观测数据的概要和生成处理。辅助数据生成处理的说明将与图12~13关联地在后文中叙述。另外,关于第一位置数据的生成处理中的精密单点定位运算的运算流程,将与图14关联地在后文中叙述。
[0132]
(观测数据的生成、选择)
[0133]
从定位卫星100经由gnss天线112接收了定位信号的分波装置220生成观测数据。在图9中示意性地示出观测数据的数据结构例。如图9所示,观测数据在伪距和载波之外,也包括定位信号的接收时刻、伪随机噪声码、信号强度等。伪随机噪声码在定位卫星100对定位信号进行扩频调制时用作编码。另外,伪随机噪声码按发送了定位信号的每个定位卫星100不同,所以在分波装置220识别定位信号的发送源时,用作识别编号。
[0134]
接着,对于观测数据的生成处理进行说明。在图10中示出观测数据生成处理的一例。如图10所示,分波装置220在gnss天线112接收定位信号时(s1010),经由通信部222对gnss接收装置240发送定位信号(s1012)。另一方面,分波装置220对于模拟信号
→
数字信号转换部226接收到的定位信号通过采样和量化而将其变换为数字信号(s1014)。该数字信号是在定位卫星100中进行二相相位偏移调制(binary phase shift keying)后、用伪随机噪声码进行扩频调制后的导航电文。因此,导航电文解调部230使用复制码数据保存部238中保存的伪随机噪声码的复制对其进行解调,并对二相相位偏移调制的信号进行解调,由此对导航电文进行解调(s1016)。进而,伪距运算部232通过使用伪随机噪声码的上述方法,计算定位卫星100与本车之间的伪距(s1018)。伪距能够通过根据定位信号中包括的数据测量
定位卫星100发送的定位信号到达gnss天线112的时间、对该测量值乘以光速而计算。之后,观测数据发送部234对该伪距加上载波等,变换为rtcm格式而生成观测数据(s1020),并发送至车辆控制装置260(s1022)。观测数据在发送接收时被分割为分组,按每个分组保持为可变长度数据。
[0135]
返回图8的第一位置数据生成序列,车辆控制装置260从分波装置220接收观测数据时,经由通信部262对辅助数据发布服务器440发送该观测数据。在卫星定位的原理上,分波装置220从多个定位卫星100分别接收定位信号并生成观测数据,并发送至车辆控制装置260。于是,车辆控制装置260选择观测数据并发送至辅助数据发布服务器440。在图11中示出观测数据选择处理的一例。如图11所示,首先,车辆控制装置260的数据处理部264对于从分波装置220接收到的观测数据,按每个定位卫星100进行分割(s1110、s1112)。在定位卫星100的识别中使用伪随机噪声码。接着,观测数据发送部266从按每个定位卫星100分割后的观测数据中,选择对辅助数据发布服务器440发送的观测数据(s1114),转换数据格式后,经由通信部262发送至辅助数据发布服务器440(s1116)。另外,观测数据发送部266选择的观测数据可以是关于1个定位卫星100的,也可以是关于2个以上定位卫星100的。另外,对辅助数据发布服务器440发送的观测数据的数据格式可以是rtcm格式,也可以是独自的数据格式。
[0136]
另外,移动体定位系统1a能够从例如构成gps的2个navstar(navigation satellites with time and ranging)block iii卫星和构成glonass的1个glonass-k卫星这样的、构成不同的卫星定位系统的定位卫星100分别接收定位信号,进行精密单点定位。在该情况下,分波装置220的伪距运算部232能够将依据wgs84的gps的定位信号和依据pe90.11的glonass的定位信号的大地坐标系变换为移动体定位系统1a依据的jgs2011大地坐标系并计算伪距。
[0137]
(增强数据的生成)
[0138]
返回图8的第一位置数据生成序列,观测数据在监视台114中也通过同样的过程生成。监视台114中生成的观测数据被发送至增强数据发布服务器420(s824),用于生成被称为增强数据的数据。增强数据是对载波相位中包括的定位误差中的、因定位卫星100航行的轨道的偏差、定位卫星100和接收装置(220、240)中搭载的时钟的精度、载波的相位的偏差引起的误差进行修正用的数据,由被称为精密轨道/时钟推算的运算处理生成(s826)。增强数据发布服务器420将生成的增强数据经由通信部422发送至辅助数据发布服务器440(s828)。
[0139]
(辅助数据的生成)
[0140]
辅助数据发布服务器440从车辆控制装置260接收观测数据(s820)、从增强数据发布服务器420接收增强数据时(s828),生成被称为辅助数据的用于修正载波相位的数据(s830)。
[0141]
此处,说明辅助数据的数据结构。在图12中示意性地示出辅助数据的数据结构的一例。如图12所示,辅助数据由对因定位卫星100航行的轨道的偏差、定位卫星100和车上装置102的gnss接收装置240中搭载的时钟的精度、载波的相位的偏差引起的误差、以及通过电离层和对流层时产生的定位信号的延迟引起的误差进行修正用的修正值,以及测距精度指标的种类、卫星时刻、伪随机噪声码等构成。
[0142]
对辅助数据生成处理进行说明。在图13中示出辅助数据生成处理的一例。如图13所示,各车辆的观测数据接收部446经由通信部442从各车辆的车辆控制装置260接收观测数据时(s1310),将其发送至对流层/电离层延迟地区修正部450。对流层/电离层延迟地区修正部450接收观测数据时,进行与基于各车辆的观测数据保存部462中保存的每个车辆的观测数据的位置坐标的比较,判断对应车辆附近是否存在定位误差收敛的其他车辆(s1312)。判断为对应车辆附近存在定位误差收敛的其他车辆的情况下(s1312:是),对流层/电离层延迟地区修正部450提取该车辆的对流层/电离层延迟修正数据作为对应车辆的对流层/电离层延迟修正数据(s1314),并发送至辅助数据发布部456。另一方面,判断为对应车辆附近不存在定位误差收敛的其他车辆的情况下(s1312:否),对流层/电离层延迟地区修正部450基于从对应车辆获取的观测数据生成对流层/电离层延迟修正数据(s1316),并发送至辅助数据发布部456。辅助数据发布部456使用从对流层/电离层延迟地区修正部450接收到的对流层/电离层延迟修正数据、和从增强数据接收部448接收到的增强数据来生成辅助数据(s1318),将数据格式变换为rtcm格式后,经由通信部442发送至对应车辆的的gnss接收装置240(s1320)。
[0143]
(第一位置数据的生成)
[0144]
返回图8的第一位置数据生成序列,从辅助数据发布服务器440接收了辅助数据的各车辆的gnss接收装置240基于上述观测方程进行精密单点定位运算(s832、s834),生成该车辆的位置数据(第一位置数据)并发送至车辆控制装置260(s836)。
[0145]
此处,沿着gnss接收装置240的动作说明第一位置数据的生成处理。在图14中示出第一位置数据的生成处理的一例。如图14所示,gnss接收装置240的定位信号接收部246经由通信部242从分波装置220接收定位信号时(s1410),将其转换为数字信号(s1412),使用伪随机码的复制对导航电文进行解调(s1414),并发送至精密单点定位运算部250。另外,辅助数据接收部经由通信部从辅助数据发布服务器440接收辅助数据时(s1416),将其发送至精密单点定位运算部250。从定位信号接收部246接收了导航电文、从辅助数据接收部248接收了辅助数据的精密单点定位运算部250基于这些数据进行精密单点定位运算,生成第一位置数据(s1418),并发送至精密单点定位运算结果发送部252。第一位置数据是通过对该定位卫星100与本车的载波相位使用辅助数据进行修正、并解联立方程而生成的。精密单点定位运算结果发送部252将从精密单点定位运算部250接收到的第一位置数据经由通信部242发送至车辆控制装置260(s1420)。
[0146]
以上第一位置数据生成序列在车上装置102起动之后、在其动作中以规定时间周期反复执行。
[0147]
<第二位置数据生成序列>
[0148]
移动体定位系统1a与第一位置数据生成序列中的上述精密单点定位运算并行地,在与第一位置数据生成序列不同的运算处理系统即第二位置数据生成序列中,也使用与第一位置数据生成序列相同的观测方程进行精密单点定位运算,生成位置数据。将该由第二位置数据生成序列生成的位置数据称为第二位置数据。在图15中示出第二位置数据生成序列的一例。如图15所示,本实施方式中,第二位置数据是经过以下过程生成的。
[0149]
从定位卫星100接收了定位信号的车上装置102生成观测数据(s1510a、s1512),并发送至地面服务器104(s1518)。接收了观测数据的地面服务器104生成增强数据和辅助数
据(s1524、s1528),使用它们计算对定位卫星100与该车辆之间的载波相位进行修正用的修正值(s1530)。地面服务器104将计算出的修正值发送至车上装置102(s1532)。接收了修正值的车上装置102完成精密单点定位运算,生成第二位置数据(s1534)。
[0150]
第二位置数据生成序列如上所述与第一位置数据生成序列不同。主要的不同点是进行精密单点定位运算的运算处理的装置和精密单点定位运算中使用的数据的发送接收路径。于是,以下,使用图16~图18对于第二位置数据生成序列进行说明。
[0151]
(观测数据的生成、选择)
[0152]
第二位置数据生成序列中,分波装置220也从定位卫星100获取定位信号(s1510a),用图10所示的观测数据生成处理来生成观测数据(s1512),并发送至车辆控制装置260(s1514)。接收了观测数据的车辆控制装置260用图11所示的观测数据选择处理从关于多个定位卫星100的观测数据中选择关于运算对象的定位卫星100的观测数据(s1516),并发送至辅助数据发布服务器440(s1518)。
[0153]
另外,监视台114也用同样的过程,从定位卫星100接收定位信号并生成观测数据(s1510b、s1520),并发送至增强数据发布服务器420(s1522)。
[0154]
(增强数据的生成)
[0155]
增强数据发布服务器440从监视台114接收观测数据并生成增强数据(s1524),并发送至辅助数据发布服务器440(s1526)。增强数据的生成处理也与第一位置数据生成序列是同样的。
[0156]
(辅助数据的生成)
[0157]
辅助数据发布服务器440从车辆控制装置260接收观测数据、从增强数据发布服务器420接收增强数据时,用图13所示的辅助数据生成处理,生成辅助数据(s1528)。辅助数据生成处理也与第一位置数据生成序列是同样的。
[0158]
但是,第二位置数据生成序列中,辅助数据的生成与之后的精密单点定位运算的运算处理关联地,与第一位置数据生成序列之间存在差异。
[0159]
第一是执行精密单点定位运算的运算装置。具体而言,第一位置数据生成序列中,精密单点定位运算由gnss接收装置240进行。另一方面,第二位置数据生成序列中,精密单点定位运算由车辆控制装置260执行。
[0160]
第二是辅助数据的发送目标与第一位置数据生成序列的情况不同,是车辆控制装置260。
[0161]
第三是进行精密单点定位运算的装置获取观测数据的途径。第二位置数据生成序列中,车辆控制装置260进行精密单点定位运算。因此,车辆控制装置260将从分波装置240接收到的观测数据中包括的载波用于精密单点定位运算。另一方面,第一位置数据生成序列中,进行精密单点定位运算的gnss接收装置240使用从定位卫星100经由分波装置220接收到的定位信号进行精密单点定位运算。
[0162]
第四是进行精密单点定位运算用的修正值的生成方法。仅基于用本车的gnss天线112接收到的定位信号进行精密单点定位运算的第一位置数据生成序列中,例如在来自定位卫星100的定位信号被隧道等遮蔽物屏蔽的状况刚消除后,不能计算修正值、进行精密单点定位。另一方面,第二位置数据生成序列中,因为能够用辅助数据发布服务器440分别得知各车辆的位置坐标,所以即使在上述状况下,也能够使用从正在隧道的出口附近行驶的
其他车辆获取的观测数据生成修正值。由此,从本车刚驶出隧道后起,就能够进行精密单点定位运算。
[0163]
(第二位置数据的生成)
[0164]
图15中举例示出的第二位置数据生成序列中,首先,辅助数据发布服务器440计算用于修正载波相位的修正值(s1530),并发送至车辆控制装置260(s1532)。车辆控制装置260使用接收到的修正值进行精密单点定位运算,生成第二位置数据(s1534)。
[0165]
在图16中示出第二位置数据生成处理的一例。如图16所示,辅助数据发布服务器440从车辆控制装置260接收观测数据和定位对象车辆的最近的位置数据时(s1610),使用生成的辅助数据计算修正值(s1612)。此时,也可以生成多个最近的位置数据和对最近的位置数据加上正态分布的随机噪声得到的位置数据,计算多个修正值,由此并行地进行多个精密单点定位运算(与图17关联地在后文中叙述)。辅助数据发布服务器440对计算出的修正值的数据格式进行转换并发送至车辆控制装置260(s1614)。另外,修正值的数据格式可以是rtcm格式,也可以是独有的数据格式。
[0166]
车辆控制装置260的外部的精密单点定位运算结果接收部268经由通信部262从辅助数据发布服务器440接收修正值时,将接收到的修正值发送至精密单点定位运算部270。接收了修正值的精密单点定位运算部270使用该修正值而对从分波装置220接收到的观测数据中包括的载波相位进行修正,用精密单点定位生成第二位置数据(s1616)。以上第二位置数据生成序列在车上装置102起动之后、在其动作中以规定时间周期反复执行。
[0167]
如上所述,第二位置数据生成序列中,用辅助数据发布服务器440计算修正值。因此,例如在接收装置(220、240)侧的时钟误差的推算中,能够使用各车辆的观测数据保存部462中保存的、从定位对象车辆以外的其他车辆接收到的观测数据。结果,能够得到增加观测点的效果。在图17中示意性地示出高精度地推算接收装置(220、240)侧的时钟误差的方法。接收装置(220、240)侧的时钟误差的推算,是作为精密单点定位运算的一环进行的。即,第一位置数据生成序列中,如图14所示,接收装置(220、240)侧的时钟误差的推算由gnss接收装置240的精密单点定位运算部259进行。gnss接收装置240的数据保存部254不具有其他车辆生成的观测数据,仅基于本车中生成的观测数据推算本车的时钟误差。将该状况图示在图17的左侧。该情况下,因为仅使用测量对象的车辆中得到的观测数据p1,所以接收装置(220、240)侧的时钟误差的推算如图17的左侧所示需要与gnss接收装置240的运算处理能力相应的时间。另一方面,第二位置数据生成序列中,如图17的右侧所图示,因为通过包括地使用各车辆的观测数据保存部462中保存的其他车辆的观测数据p2~p4而增加观测点,所以能够将时钟误差小的车辆的数值作为对定位卫星100与本车之间的载波相位进行修正时的变量,与推算本车的时钟误差作为变量的情况相比,能够缩短计算修正值所需的时间。或者,如上所述生成多个对最近的位置数据加上正态分布的随机噪声得到的位置数据,模拟地增加观测点,进行并行运算,由此能够缩短定位精度的收敛时间。
[0168]
上述说明中,使用图17举例示出了在接收装置(220、240)侧的时钟误差的推算中使用从定位对象车辆以外的其他车辆接收到的观测数据的方法,但在计算关于构成修正值的其他误差因素的变量的情况下,也能够使用在各车辆的观测数据保存部462中保存的、从定位对象车辆以外的其他车辆接收到的观测数据。
[0169]
<第一位置数据或第二位置数据的选择>
[0170]
本实施例的移动体定位系统1a中,车辆控制装置260能够对由不同的运算处理系统计算出的第一位置数据和第二位置数据进行比较,将更高精度的位置数据选择为本车的位置数据。在图18中示出选择位置数据的过程的一例。如图18所示,车辆控制装置260的收敛判断/定位选择部272经由通信部262从gnss接收装置240接收第一位置数据时(s1810),对获取的第一位置数据的误差的离散程度、与精密单点定位运算部270生成的第二位置数据的误差的离散程度进行比较(s1812)。判断为第二位置数据的误差的离散程度更小的情况下(s1812:是),将第二位置坐标作为本车的位置坐标(s1814)。另一方面,判断为第一位置数据的误差的离散程度更小的情况下(s1812:否),收敛判断/定位判断部272将第一位置数据作为本车的位置坐标(s1816)。
[0171]
收敛判断/定位选择部272对于生成的第一位置数据和第二位置数据,例如计算规定时间内的各位置数据的标准差,对第一位置数据与第二位置数据的标准差进行比较,由此能够根据定位的收敛状况判断将第一位置数据和第二位置数据中的哪一者作为本车的位置数据。
[0172]
另外,收敛判断/定位选择部272在从精密单点定位运算部270接收第二位置数据之后的规定时间、例如5秒以内未能接收与该第二位置数据表示同一位置的第一位置数据的情况下,将该第二位置数据作为本车的位置数据。同样地,收敛判断/定位选择部272在从gnss接收装置240接收第一位置数据之后的规定时间内未能接收与该第一位置数据表示同一位置的第二位置数据的情况下,将该第一位置数据作为本车的位置数据。由此,与位置数据的获取途径是一个的情况相比,能够实现稳定的定位。
[0173]
收敛判断/定位选择部272例如可以对于用上述处理选择的位置数据,使用周知的卡尔曼滤波与推算的本车的位置坐标进行比较,在同一大地坐标系中的双方的位置坐标的x成分、y成分、z成分的差的合计值在规定范围内的情况下,判断为定位误差已收敛。
[0174]
车辆控制装置260的定位汇总部274从收敛判断/定位选择部272获取位置数据时,通过与经由通信部262接收到的各种传感器数据汇总而生成汇总定位数据,并发送至行驶轨道生成/车辆控制部276。行驶轨道生成/车辆控制部276接收汇总定位数据时,基于它生成行驶轨道数据,并经由通信部262对控制本车的行驶用的致动器等行驶控制用设备发送控制量。
[0175]
如以上所说明,根据本实施例的移动体定位系统1,用第一位置数据生成序列和第二位置数据生成序列这2个运算处理系统进行精密单点定位运算。其中,第二位置数据生成序列因为由辅助数据发布服务器440进行精密单点定位运算中的修正值的运算,所以能够在修正值的计算过程中使用从监视台114获取的观测数据和从其他车辆接收到的观测数据。结果,例如在车上装置102刚起动后和来自卫星的信号被隧道等遮蔽物屏蔽的状况这样,用仅基于用本车的gnss天线112接收到的定位信号进行精密单点定位的第一位置数据生成序列不能计算出修正值的状况下,也能够用第二位置数据生成序列完成精密单点定位运算,所以通过将第二位置数据作为本车的位置数据,能够在短时间内使定位误差收敛,能够实现稳定的定位。结果,能够提供一种能够有效地缩短定位误差的收敛时间的移动体定位系统1a。
[0176]
另外,本实施例的移动体定位系统1中,第一位置数据生成序列与第二位置数据生成序列的处理系统不同。即,构成修正值的变量和观测值的获取途径不同,所以即使使用同
一观测方程进行精密单点定位运算,计算结果、运算精度中也可能产生差异。移动体定位系统1a中,能够对表示同一位置的2个运算结果进行比较衡量,将更高精度的运算结果作为定位对象的车辆的位置坐标。因此,根据移动体定位系统1a,能够使用高精度的位置数据,能够有助于实现需要高精度的定位的自主行驶车辆等的行驶控制。
[0177]
——实施例2——
[0178]
接着,对于本发明的其他实施例进行说明。实施例1中说明的移动体定位系统1中,第二位置数据生成序列用地面服务器104和车上装置102分担地进行精密单点定位运算。具体而言,是辅助数据发布服务器440计算用于修正载波相位的修正值,车辆控制装置260使用该修正值完成精密单点定位运算,由此生成第二位置数据的结构。本实施例中,第二位置数据生成序列用地面服务器104进行精密单点定位运算的全部处理,车上装置102从该地面服务器104接收运算结果即位置数据(修正后位置坐标)。
[0179]
本实施例的移动体定位系统1的物理或功能结构与图1~7所示的实施例1的结构相同。另外,第一位置数据生成序列的处理流程也与图8~14所示的实施例1中的第一位置数据生成序列的处理流程相同。因此,关于这些重复的要素省略说明。
[0180]
<关于第二位置数据生成序列>
[0181]
使用图19说明本实施例的第二位置数据生成序列。在图19中示出第二位置数据生成序列的一例。
[0182]
从定位卫星100接收了定位信号的车上装置102生成观测数据(s1910a、s1912),并发送至地面服务器104(s1918)。接收了观测数据的地面服务器104生成增强数据和辅助数据(s1924、s1928),使用它们完成精密单点定位运算(s1930)。由此生成第二位置数据。地面服务器104将生成的第二位置数据发送至车上装置102(s1932)。
[0183]
接着,说明本实施例中的第二位置数据生成处理。在图20中示出第二位置数据生成处理的一例。如图20所示,辅助数据发布服务器440的各车辆的观测数据接收部经由通信部442从车辆控制装置260接收观测数据和最近的车辆的位置数据时(s2010),将其发送至精密单点定位运算部452。精密单点定位运算部452使用从各车辆的观测数据接收部446接收到的观测数据和对流层/电离层延迟地区修正部450生成的辅助数据进行精密单点定位运算,生成第二位置数据(s2012)。此时,使用多个观测点推算接收装置(220、240)侧的时钟误差,这一点与实施例1的情况是同样的。辅助数据发布服务器440对运算结果的数据格式进行转换,作为第二位置数据发送至车辆控制装置260(s2014)。另外,第二位置数据的数据格式可以是rtcm格式,也可以是独有的数据格式。
[0184]
此后,关于第一位置数据和第二位置数据的选择处理与实施例1的情况是同样的。
[0185]
如以上所说明,根据实施例2的移动体定位系统1,第二位置数据生成序列中的精密单点定位运算用辅助数据发布服务器440进行,所以与实施例1的情况相比,能够减小车辆控制装置260的处理负荷。由此,能够用同一位置的硬件使车辆控制装置260执行其他数据处理。或者能够得到能够实现车辆控制装置260的硬件成本降低等效果。
[0186]
以上,对于本发明的实施方式参考附图进行了说明。另外,关于上述实施方式的说明是为了使本发明易于理解的,并不限定本发明的技术范围。对于本发明,可以不脱离上述实施方式的主旨地进行变更、改良,并且本发明中包括其等价物。
[0187]
附图标记说明
[0188]
1 移动体定位系统
ꢀꢀꢀꢀꢀ
100 定位卫星
ꢀꢀꢀꢀ
102 车上装置
[0189]
104 地面服务器
ꢀꢀꢀꢀꢀ
112 gnss天线
ꢀꢀꢀꢀ
114 监视台
[0190]
220 分波装置
ꢀꢀꢀꢀꢀꢀꢀ
226 模拟信号
→
数字信号转换部
[0191]
228 码相关部
ꢀꢀꢀꢀꢀꢀꢀ
230 导航电文解调部
[0192]
232 伪距运算部
ꢀꢀꢀꢀꢀ
234 观测数据发送部
[0193]
238、257 复制码数据保存部
[0194]
240 gnss接收装置
ꢀꢀꢀꢀꢀ
246 定位信号接收部
[0195]
248 辅助数据接收部
ꢀꢀꢀꢀ
250、270 精密单点定位运算部
[0196]
252 精密单点定位运算结果发送部
ꢀꢀꢀꢀꢀ
2q56 定位信号数据保存部
[0197]
258 辅助数据保存部
[0198]
259 精密单点定位运算结果数据保存部
[0199]
260 车辆控制装置
ꢀꢀꢀ
266 观测数据发送部
[0200]
268 外部的精密单点定位运算结果接收部
[0201]
272 收敛判断/定位选择部
[0202]
274 定位汇总部
ꢀꢀꢀꢀꢀꢀ
276 行驶轨道生成/车辆控制部
[0203]
280 定位用补充数据保存部
ꢀꢀꢀ
282 车辆控制用地图数据保存部
[0204]
420 增强数据发布服务器
ꢀꢀꢀ
426 精密轨道/时钟推算部
[0205]
428 增强数据生成部
ꢀꢀꢀꢀꢀꢀꢀ
430 增强数据发布部
[0206]
434 监视台的观测数据保存部
[0207]
440 辅助数据发布服务器
ꢀꢀꢀ
446 各车辆的观测数据接收部
[0208]
448 增强数据接收部
ꢀꢀꢀꢀꢀꢀꢀ
450 对流层/电离层延迟地区修正部
[0209]
452 精密单点定位运算部
ꢀꢀꢀ
454 精密单点定位运算结果发布部
[0210]
456 辅助数据发布部
ꢀꢀꢀꢀꢀꢀꢀ
460 各车辆的观测数据保存部
[0211]
462 辅助数据保存部
ꢀꢀꢀꢀꢀꢀꢀ
470 管理服务器
[0212]
500 移动体(车辆)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1