测角装置、测角方法及车载装置与流程
1.本发明涉及分别计算目标的仰角及目标的方位角的测角装置、测角方法及车载装置。
背景技术:
2.在以下的专利文献1中公开了一种计算目标物的仰角角度的雷达。
3.专利文献1所公开的雷达具备2个发送天线和1个接收天线。
4.2个发送天线中的一方的发送天线在第1方向上发送第1信号,另一方的发送天线在与第1方向不同的第2方向上发送第2信号。第1方向是相对于雷达的视轴倾斜了角度θ的方向,第2方向是相对于雷达的视轴倾斜了角度
‑
θ的方向。
5.接收天线接收被目标物反射的第1信号及被目标物反射的第2信号中的每一个。
6.专利文献1所公开的雷达根据由接收天线接收到的第1信号与由接收天线接收到的第2信号之间的相位差,计算目标物的仰角角度。
7.现有技术文献
8.专利文献
9.专利文献1:日本特开2016
‑
102801号公报
技术实现要素:
10.发明要解决的问题
11.专利文献1所公开的雷达由于接收天线的个数为1个,因此,难以扩宽方位方向的天线开口。因此,专利文献1所公开的雷达存在如下问题:即便能够计算目标物的仰角角度,也难以以高分辨率计算目标物的方位角。
12.本发明是为了解决上述问题而完成的,其目的在于,得到一种能够计算目标的仰角、并且与利用1个接收天线的情况相比能够以高分辨率计算目标的方位角的测角装置、测角方法及车载装置。
13.用于解决问题的手段
14.本发明的测角装置具备:信号提取部,其在从第1发送天线辐射第1波束并从方位方向的设置位置与第1发送天线不同的第2发送天线辐射辐射方向的仰角角度与第1波束不同的第2波束之后、从配置在第1发送天线与第2发送天线之间的多个接收天线分别输出包含第1波束被目标反射后的第1反射波和第2波束被目标反射后的第2反射波的接收信号时,从自多个接收天线中的1个以上的接收天线输出的接收信号中提取包含第1反射波且不包含第2反射波的信号作为第1解调信号,并提取包含第2反射波且不包含第1反射波的信号作为第2解调信号;仰角计算部,其通过进行使用第1解调信号与第2解调信号的和信号以及第1解调信号与第2解调信号的差信号的单脉冲测角,计算目标的仰角;以及方位角计算部,其使用从多个接收天线输出的接收信号,计算目标的方位角。
15.发明的效果
16.根据本发明,测角装置构成为具备仰角计算部和方位角计算部,该仰角计算部通过进行使用第1解调信号与第2解调信号的和信号以及第1解调信号与第2解调信号的差信号的单脉冲测角来计算目标的仰角,该方位角计算部使用从多个接收天线输出的接收信号,计算目标的方位角。因此,本发明的测角装置能够计算目标的仰角,并且与利用1个接收天线的情况相比能够以高分辨率计算目标的方位角。
附图说明
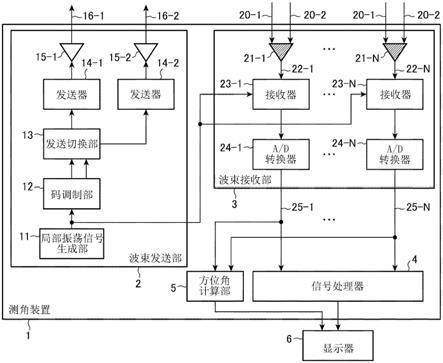
17.图1是示出实施方式1的测角装置1的结构图。
18.图2是示出实施方式1的测角装置1中的信号处理器4及方位角计算部5的硬件的硬件结构图。
19.图3是示出第1发送天线15
‑
1、第2发送天线15
‑
2及接收天线21
‑
1~21
‑
n的配置例的说明图。
20.图4是示出第1波束16
‑
1的辐射方向的仰角角度θ
b1
及第2波束16
‑
2的辐射方向的仰角角度θ
b2
的说明图。
21.图5是示出实施方式1的测角装置1中的信号处理器4的结构图。
22.图6是信号处理器4的结构要素及方位角计算部5由软件或固件等实现的情况下的计算机的硬件结构图。
23.图7是示出信号处理器4及方位角计算部5的处理步骤即测角方法的流程图。
24.图8是示出第1波束16
‑
1的辐射方向的仰角角度θ
b1
及第2波束16
‑
2的辐射方向的仰角角度θ
b2
的一例的说明图。
25.图9是示出由仰角计算处理部36进行的振幅比较单脉冲测角的说明图。
26.图10是示出使用离散图案的仰角θ
tgt
的计算处理的说明图。
27.图11是示出第1发送天线15
‑
1、第2发送天线15
‑
2及接收天线21
‑
n中的各个相位中心等的说明图。
28.图12是示出实施方式4的测角装置1的结构图。
29.图13是示出第1发送天线61
‑
1、第2发送天线61
‑
2及接收天线21
‑
1~21
‑
n的配置例的说明图。
30.图14是示出第1波束62
‑
3的辐射方向的仰角角度θ
b3
及第2波束16
‑
4的辐射方向的仰角角度θ
b4
的说明图。
31.图15是示出第1波束62
‑
3的辐射方向的仰角角度θ
b3
及第2波束62
‑
4的辐射方向的仰角角度θ
b4
的一例的说明图。
32.图16是示出实施方式4的测角装置1中的信号处理器7的结构图。
33.图17是示出信号处理器7及方位角计算部5的处理步骤即测角方法的流程图。
34.图18是示出由仰角计算处理部73进行的相位比较单脉冲测角的说明图。
35.图19是示出第1发送天线61
‑
1、第2发送天线61
‑
2及接收天线21
‑
1~21
‑
n的配置例的说明图。
36.图20是示出包含实施方式1~6中的任意实施方式的测角装置1的车载装置的结构图。
具体实施方式
37.以下,为了更加详细地说明本发明,按照附图对用于实施本发明的方式进行说明。
38.实施方式1.
39.图1是示出实施方式1的测角装置1的结构图。
40.图2是示出实施方式1的测角装置1中的信号处理器4及方位角计算部5的硬件的硬件结构图。
41.在图1中,测角装置1具备波束发送部2、波束接收部3、信号处理器4及方位角计算部5。
42.波束发送部2具备局部振荡信号生成部11、码调制部12、发送切换部13、发送器14
‑
1、14
‑
2、第1发送天线15
‑
1及第2发送天线15
‑
2。
43.波束发送部2从第1发送天线15
‑
1辐射第1波束16
‑
1,从第2发送天线15
‑
2辐射第2波束16
‑
2。
44.第1波束16
‑
1及第2波束16
‑
2分别是rf(radio frequency:射频)信号。
45.局部振荡信号生成部11生成局部振荡信号,将生成的局部振荡信号向码调制部12及接收器23
‑
1~23
‑
n分别输出。
46.码调制部12例如具有存储有第1码c1及第2码c2的内部存储器。
47.码调制部12对从局部振荡信号生成部11输出的局部振荡信号赋予第1码c1,将赋予了第1码c1的局部振荡信号(以下称为“第1局部振荡信号”)向发送切换部13输出。
48.此外,码调制部12对从局部振荡信号生成部11输出的局部振荡信号赋予与第1码c1不同的第2码c2,将赋予了第2码c2的局部振荡信号(以下称为“第2局部振荡信号”)向发送切换部13输出。
49.作为第1码c1及第2码c2,能够使用巴克码或m序列(maximum length sequence:最大长度序列)码等。
50.这里,码调制部12具有存储有第1码c1及第2码c2的内部存储器。但是,这只不过是一例,码调制部12也可以从外部分别被提供第1码c1及第2码c2。
51.发送切换部13将从码调制部12输出的第1局部振荡信号向发送器14
‑
1输出,将从码调制部12输出的第2局部振荡信号向发送器14
‑
2输出。
52.此外,发送切换部13将分别表示第1波束16
‑
1的辐射方向的仰角角度及方位角度的第1角度信息向发送器14
‑
1输出。发送切换部13将分别表示第2波束16
‑
2的辐射方向的仰角角度及方位角度的第2角度信息向发送器14
‑
2输出。
53.第1波束16
‑
1的辐射方向的仰角角度与第2波束16
‑
2的辐射方向的仰角角度不同。
54.第1波束16
‑
1的辐射方向的方位角度与第2波束16
‑
2的辐射方向的方位角度大致相同。
55.第1角度信息及第2角度信息分别可以存储于发送切换部13的内部存储器,也可以从外部被提供。
56.第1波束16
‑
1的频率与第2波束16
‑
2的频率是大致相同的频率。
57.发送器14
‑
1从发送切换部13取得第1局部振荡信号,从发送切换部13取得第1角度信息。
58.发送器14
‑
1将取得的第1局部振荡信号提供给第1发送天线15
‑
1,由此,使第1波束
16
‑
1从第1发送天线15
‑
1辐射。
59.发送器14
‑
1控制第1发送天线15
‑
1,使得从第1发送天线15
‑
1辐射的第1波束16
‑
1的辐射方向的仰角角度与取得的第1角度信息所示的仰角角度一致。
60.此外,发送器14
‑
1控制第1发送天线15
‑
1,使得从第1发送天线15
‑
1辐射的第1波束16
‑
1的辐射方向的方位角度与取得的第1角度信息所示的方位角度一致。
61.发送器14
‑
2从发送切换部13取得第2局部振荡信号,从发送切换部13取得第2角度信息。
62.发送器14
‑
2将取得的第2局部振荡信号提供给第2发送天线15
‑
2,由此,使第2波束16
‑
2从第2发送天线15
‑
2辐射。
63.发送器14
‑
2控制第2发送天线15
‑
2,使得从第2发送天线15
‑
2辐射的第2波束16
‑
2的辐射方向的仰角角度与取得的第2角度信息所示的仰角角度一致。
64.此外,发送器14
‑
2控制第2发送天线15
‑
2,使得从第2发送天线15
‑
2辐射的第2波束16
‑
2的辐射方向的方位角度与取得的第2角度信息所示的方位角度一致。
65.如图3所示,第1发送天线15
‑
1具有1个天线开口15
‑
1a,从1个天线开口15
‑
1a向空间辐射第1波束16
‑
1。
66.如图3所示,第2发送天线15
‑
2具有1个天线开口15
‑
2a,从1个天线开口15
‑
2a向空间辐射第2波束16
‑
2。
67.如图3所示,第1发送天线15
‑
1的方位方向的设置位置与第2发送天线15
‑
2的方位方向的设置位置不同。
68.图3是示出第1发送天线15
‑
1、第2发送天线15
‑
2及接收天线21
‑
1~21
‑
n的配置例的说明图。
69.在图3的例子中,第1发送天线15
‑
1与第2发送天线15
‑
2的配置间隔为d。
70.在图3的例子中,第1发送天线15
‑
1的天线开口长度与第2发送天线15
‑
2的天线开口长度相等。但是,这只不过是一例,第1发送天线15
‑
1的天线开口长度与第2发送天线15
‑
2的天线开口长度也可以不同。
71.如图4所示,第1波束16
‑
1的辐射方向的仰角角度为θ
b1
,如图4所示,第2波束16
‑
2的辐射方向的仰角角度为θ
b2
,θ
b1
≠θ
b2
。
72.图4是示出第1波束16
‑
1的辐射方向的仰角角度θ
b1
及第2波束16
‑
2的辐射方向的仰角角度θ
b2
的说明图。
73.在图3及图4中,x轴是沿着方位方向的轴。在图3及图4中,为了简化说明,方位方向与水平方向一致。但是,这只不过是一例,方位方向也可以不与水平方向一致。
74.z轴是沿着仰角方向的轴。在图3及图4中,为了简化说明,仰角方向与铅垂方向一致。但是,这只不过是一例,仰角方向也可以不与铅垂方向一致。
75.y轴是与x轴正交且与z轴正交的轴。
76.波束接收部3具备接收天线21
‑
1~21
‑
n、接收器23
‑
1~23
‑
n及模数转换器(以下称为“a/d转换器”)24
‑
1~24
‑
n。
77.接收天线21
‑
1~21
‑
n配置在第1发送天线15
‑
1与第2发送天线15
‑
2之间。n是2以上的整数。
78.在图3的例子中,n个接收天线21
‑
n(n=1、
···
、n)在水平方向上配置为一列。
79.接收天线21
‑
n接收第1波束16
‑
1被目标反射后的第1反射波20
‑
1和第2波束16
‑
2被目标反射后的第2反射波20
‑
2。
80.接收天线21
‑
n将包含第1反射波20
‑
1和第2反射波20
‑
2的接收信号22
‑
n向接收器23
‑
n输出。
81.在图3的例子中,接收天线21
‑
1~21
‑
n的天线开口长度彼此相等。但是,这只不过是一例,接收天线21
‑
1~21
‑
n的天线开口长度也可以互不相同。
82.第1发送天线15
‑
1、第2发送天线15
‑
2及接收天线21
‑
1~21
‑
n分别能够使用贴片天线或喇叭天线等。
83.接收器23
‑
n使用从局部振荡信号生成部11输出的局部振荡信号,将从接收天线21
‑
n输出的接收信号22
‑
n的频率例如从rf频率降低到if(intermediate frequency:中频)频率。
84.接收器23
‑
n将频率降低后的接收信号22
‑
n向模数转换器(以下称为“a/d转换器”)24
‑
n输出。
85.a/d转换器24
‑
n将从接收器23
‑
n输出的频率降低后的接收信号22
‑
n从模拟信号转换成数字信号25
‑
n,将数字信号25
‑
n向信号处理器4及方位角计算部5分别输出。
86.如图5所示,信号处理器4具备信号提取部31及仰角计算部32。
87.图5是示出实施方式1的测角装置1中的信号处理器4的结构图。
88.在图5中,信号提取部31例如通过图2所示的信号提取电路41来实现。
89.信号提取部31例如具有存储有第1码c1及第2码c2的内部存储器。
90.信号提取部31使用第1码c1,从自a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n中的1个以上的各个数字信号25
‑
n中提取第1解调信号s1。
91.此外,信号提取部31使用第2码c2,从1个以上的各个数字信号25
‑
n中提取第2解调信号s2。
92.信号提取部31将1个以上的第1解调信号s1和1个以上的第2解调信号s2向仰角计算部32输出。
93.第1解调信号s1是包含第1反射波20
‑
1且不包含第2反射波20
‑
2的信号,第2解调信号s2是包含第2反射波20
‑
2且不包含第1反射波20
‑
1的信号。
94.这里,信号提取部31具有存储有第1码c1及第2码c2的内部存储器。但是,这只不过是一例,信号提取部31也可以从外部分别被提供第1码c1及第2码c2。
95.仰角计算部32具备傅里叶变换部33、积分部34、目标候选检测部35及仰角计算处理部36。
96.仰角计算部32通过进行使用第1解调信号s1与第2解调信号s2的和信号以及第1解调信号s1与第2解调信号s2的差信号的单脉冲测角,计算目标的仰角θ
tgt
。
97.仰角计算部32将计算出的目标的仰角θ
tgt
向显示器6输出。
98.傅里叶变换部33例如通过图2所示的傅里叶变换电路42来实现。
99.傅里叶变换部33通过对从信号提取部31输出的各个第1解调信号s1进行高速傅里叶变换(fft:fast fourier transform),将各个第1解调信号s1转换成频域的信号fs1。
100.此外,傅里叶变换部33通过对从信号提取部31输出的各个第2解调信号s2进行fft,将各个第2解调信号s2转换成频域的信号fs2。
101.傅里叶变换部33将1个以上的频域的信号fs1和1个以上的频域的信号fs2向积分部34输出。
102.这里,傅里叶变换部33对各个第1解调信号s1进行fft,对各个第2解调信号s2进行fft。但是,这只不过是一例,傅里叶变换部33也可以对各个第1解调信号s1进行数字傅里叶变换(dft:digital fourier transform),对各个第2解调信号s2进行dft。
103.积分部34例如通过图2所示的积分电路43来实现。
104.积分部34在从傅里叶变换部33接受到多个频域的信号fs1时,对多个频域的信号fs1进行非相干积分。
105.此外,积分部34在从傅里叶变换部33接受多到个频域的信号fs1时,对多个频域的信号fs2进行非相干积分。
106.积分部34将第1积分信号ic1作为频域的信号fs1的非相干积分结果而向目标候选检测部35输出,将第2积分信号ic2作为频域的信号fs2的非相干积分结果而向目标候选检测部35输出。
107.如果从傅里叶变换部33输出的频域的信号fs1的数量为1个,则积分部34将频域的信号fs1作为第1积分信号ic1向目标候选检测部35输出。
108.此外,如果从傅里叶变换部33输出的频域的信号fs2的数量为1个,则积分部34将频域的信号fs2作为第2积分信号ic2向目标候选检测部35输出。
109.目标候选检测部35例如通过图2所示的目标候选检测电路44来实现。
110.目标候选检测部35通过实施使用从积分部34输出的第1积分信号ic1的恒定故障报警率(cfar:constant faulse alarm ratio)处理等,来计算表示目标候选的振幅的第1目标信号m1(θ
tgt
)。
111.此外,目标候选检测部35通过实施使用从积分部34输出的第2积分信号ic2的cfar处理等,来计算表示目标候选的振幅的第2目标信号m2(θ
tgt
)。
112.目标候选检测部35将第1目标信号m1(θ
tgt
)及第2目标信号m2(θ
tgt
)中的每一个向仰角计算处理部36输出。
113.仰角计算处理部36例如通过图2所示的仰角计算处理电路45来实现。
114.仰角计算处理部36计算从目标候选检测部35输出的第1目标信号m1(θ
tgt
)与第2目标信号m2(θ
tgt
)的和信号σ(θ
tgt
)。
115.此外,仰角计算处理部36计算从目标候选检测部35输出的第1目标信号m1(θ
tgt
)与第2目标信号m2(θ
tgt
)的差信号δ(θ
tgt
)。
116.仰角计算处理部36通过进行使用和信号σ(θ
tgt
)和差信号δ(θ
tgt
)的振幅比较单脉冲测角,来计算目标的仰角θ
tgt
。
117.仰角计算处理部36将计算出的目标的仰角θ
tgt
向显示器6输出。
118.方位角计算部5例如通过图2所示的方位角计算电路46来实现。
119.方位角计算部5通过使用从a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n,实施dbf(digital beam forming:数字波束形成)处理,来计算目标的方位角
120.方位角计算部5将计算出的目标的方位角向显示器6输出。
121.这里,方位角计算部5通过实施dbf处理来计算目标的方位角但是,这只不过是一例,方位角计算部5也可以通过使用从a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~
25
‑
n,实施mimo(multi input multi output:多输入多输出)处理,来计算目标的方位角
122.显示器6显示由仰角计算部32计算出的目标的仰角θ
tgt
及由方位角计算部5计算出的目标的方位角等。
123.在图1及图5中,设想作为信号处理器4的结构要素的信号提取部31、傅里叶变换部33、积分部34、目标候选检测部35及仰角计算处理部36、以及方位角计算部5分别通过图2所示的专用的硬件来实现。即,设想信号处理器4的结构要素及方位角计算部5通过信号提取电路41、傅里叶变换电路42、积分电路43、目标候选检测电路44、仰角计算处理电路45及方位角计算电路46来实现。
124.这里,信号提取电路41、傅里叶变换电路42、积分电路43、目标候选检测电路44、仰角计算处理电路45及方位角计算电路46分别例如对应于单一电路、复合电路、程序化的处理器、并行程序化的处理器、asic(application specific integrated circuit:专用集成电路),fpga(field
‑
programmable gate array)、或者它们的组合。
125.信号处理器4的结构要素及方位角计算部5不限于由专用的硬件实现,信号处理器4的结构要素及方位角计算部5也可以通过软件、固件、或软件与固件的组合来实现。
126.软件或固件以程序的形式存储在计算机的存储器中。计算机是指执行程序的硬件,例如对应于cpu(central processing unit:中央处理单元)、中央处理装置、处理装置、运算装置、微处理器、微型计算机、处理器或者dsp(digital signal processor:数字信号处理器)。
127.图6是信号处理器4的结构要素及方位角计算部5由软件或固件等实现的情况下的计算机的硬件结构图。
128.在信号处理器4的结构要素及方位角计算部5由软件或固件等实现的情况下,将用于使计算机执行信号提取部31、傅里叶变换部33、积分部34、目标候选检测部35、仰角计算处理部36及方位角计算部5的处理步骤的程序存储于存储器51。而且,计算机的处理器52执行存储器51所存储的程序。
129.图7是示出信号处理器4及方位角计算部5的处理步骤即测角方法的流程图。
130.此外,在图2中,示出信号处理器4的结构要素及方位角计算部5分别由专用的硬件实现的例子,在图6中,示出信号处理器4及方位角计算部5由软件或固件等实现的例子。但是,这只不过是一例,也可以是,信号处理器4中的一部分结构要素或方位角计算部5由专用的硬件实现,剩余的结构要素由软件或固件等实现。
131.接着,对图1所示的测角装置1的动作进行说明。
132.波束发送部2从第1发送天线15
‑
1朝向目标辐射作为rf信号的第1波束16
‑
1,从第2发送天线15
‑
2朝向目标辐射作为rf信号的第2波束16
‑
2。
133.以下,对波束发送部2的动作具体进行说明。
134.首先,局部振荡信号生成部11例如生成高频的局部振荡信号,将生成的局部振荡信号分别向码调制部12及接收器23
‑
1~23
‑
n输出。
135.码调制部12在从局部振荡信号生成部11接受局部振荡信号后,对局部振荡信号赋予第1码c1,将赋予了第1码c1的局部振荡信号即第1局部振荡信号向发送切换部13输出。
136.此外,码调制部12对从局部振荡信号生成部11输出的局部振荡信号赋予与第1码
c1不同的第2码c2,将赋予了第2码c2的局部振荡信号即第2局部振荡信号向发送切换部13输出。
137.发送切换部13在从码调制部12接受第1局部振荡信号后,将第1局部振荡信号向发送器14
‑
1输出。
138.此外,发送切换部13将分别表示第1波束16
‑
1的辐射方向的仰角角度θ
b1
及方位角度的第1角度信息向发送器14
‑
1输出。
139.发送切换部13在从码调制部12接受第2局部振荡信号后,将第2局部振荡信号向发送器14
‑
2输出。
140.此外,发送切换部13将分别表示第2波束16
‑
2的辐射方向的仰角角度θ
b2
及方位角度的第2角度信息向发送器14
‑
2输出。
141.发送器14
‑
1从发送切换部13取得第1局部振荡信号,从发送切换部13取得第1角度信息。
142.发送器14
‑
1通过将取得的第1局部振荡信号提供给第1发送天线15
‑
1,使第1波束16
‑
1从第1发送天线15
‑
1辐射。
143.发送器14
‑
1控制第1发送天线15
‑
1,使得从第1发送天线15
‑
1辐射的第1波束16
‑
1的辐射方向的仰角角度与取得的第1角度信息所示的仰角角度θ
b1
一致。
144.此外,发送器14
‑
1控制第1发送天线15
‑
1,使得从第1发送天线15
‑
1辐射的第1波束16
‑
1的辐射方向的方位角度与取得的第1角度信息所示的方位角度一致。
145.发送器14
‑
2从发送切换部13取得第2局部振荡信号,从发送切换部13取得第2角度信息。
146.发送器14
‑
2通过将取得的第2局部振荡信号提供给第2发送天线15
‑
2,使第2波束16
‑
2从第2发送天线15
‑
2辐射。
147.发送器14
‑
2控制第2发送天线15
‑
2,使得从第2发送天线15
‑
2辐射的第2波束16
‑
2的辐射方向的仰角角度与取得的第2角度信息所示的仰角角度θ
b2
一致。
148.此外,发送器14
‑
2控制第2发送天线15
‑
2,使得从第2发送天线15
‑
2辐射的第2波束16
‑
2的辐射方向的方位角度与取得的第2角度信息所示的方位角度一致。
149.如图4所示,第1波束16
‑
1的辐射方向的仰角角度θ
b1
与第2波束16
‑
2的辐射方向的仰角角度θ
b2
不同。
150.图4所示的仰角角度θ
b1
与图4所示的仰角角度θ
b2
均向负的仰角方向倾斜。但是,这只不过是一例,如图8所示,也可以是,仰角角度θ
b1
向负的仰角方向倾斜,仰角角度θ
b2
向正的仰角方向倾斜。
151.图8是示出第1波束16
‑
1的辐射方向的仰角角度θ
b1
及第2波束16
‑
2的辐射方向的仰角角度θ
b2
的一例的说明图。在图8中,为了容易理解仰角角度θ
b1
与仰角角度θ
b2
的差异,表记为第1发送天线15
‑
1与第2发送天线15
‑
2设置在相同的位置。
152.第1波束16
‑
1的辐射方向的方位角度与第2波束16
‑
2的辐射方向的方位角度大致相同。
153.第1发送天线15
‑
1向空间辐射第1波束16
‑
1。
154.第2发送天线15
‑
2向空间辐射第2波束16
‑
2。
155.在图1所示的测角装置1中,在相同时刻从第1发送天线15
‑
1及第2发送天线15
‑
2分
别辐射第1波束16
‑
1和第2波束16
‑
2。
156.从第1发送天线15
‑
1辐射的第1波束16
‑
1被目标反射,被目标反射后的第1波束16
‑
1作为第1反射波20
‑
1被接收天线21
‑
1~21
‑
n分别接收。
157.从第2发送天线15
‑
2辐射的第2波束16
‑
2被目标反射,被目标反射后的第2波束16
‑
2作为第2反射波20
‑
2被接收天线21
‑
1~21
‑
n分别接收。
158.接收天线21
‑
n(n=1、
···
、n)在接收到第1反射波20
‑
1及第2反射波20
‑
2中的每一个时,将包含第1反射波20
‑
1和第2反射波20
‑
2的接收信号22
‑
n向接收器23
‑
n输出。
159.接收器23
‑
n使用从局部振荡信号生成部11输出的局部振荡信号,将从接收天线21
‑
n输出的接收信号22
‑
n的频率例如从rf频率降低到if频率。
160.接收器23
‑
n将频率降低后的接收信号22
‑
n向a/d转换器24
‑
n输出。
161.a/d转换器24
‑
n在从接收器23
‑
n接受频率降低后的接收信号22
‑
n后,将频率降低后的接收信号22
‑
n从模拟信号转换成数字信号25
‑
n,将数字信号25
‑
n向信号处理器4及方位角计算部5分别输出。
162.信号提取部31使用第1码c1,从自a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n中的1个以上的各个数字信号25
‑
n中提取第1解调信号s1(图7的步骤st1)。
163.信号提取部31从1个以上的各个数字信号25
‑
n中提取第1解调信号s1即可。因此,信号提取部31可以从任意的1个数字信号25
‑
n中提取第1解调信号s1,也可以从任意的2个数字信号25
‑
n中分别提取第1解调信号s1。此外,信号提取部31也可以从n个数字信号25
‑
1~25
‑
n中分别提取第1解调信号s1。
164.信号提取部31使用第2码c2,从自a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n中的1个以上的各个数字信号25
‑
n中提取第2解调信号s2(图7的步骤st1)。
165.信号提取部31从1个以上的各个数字信号25
‑
n中提取第2解调信号s2即可。因此,信号提取部31可以从任意的1个数字信号25
‑
n中提取第2解调信号s2,也可以从任意的2个数字信号25
‑
n中分别提取第2解调信号s2。此外,信号提取部31也可以从n个数字信号25
‑
1~25
‑
n中分别提取第2解调信号s2。
166.另外,使用第1码c1从数字信号25
‑
n中提取第1解调信号s1的处理以及使用第2码c2从数字信号25
‑
n中提取第2解调信号s2的处理本身是公知的技术,因此省略详细的说明。
167.信号提取部31将提取出的1个以上的第1解调信号s1向傅里叶变换部33输出,将提取出的1个以上的第2解调信号s2向傅里叶变换部33输出。
168.傅里叶变换部33在从信号提取部31接受1个以上的第1解调信号s1后,对各个第1解调信号s1进行fft,由此,将各个第1解调信号s1转换成频域的信号fs1(图7的步骤st2)。
169.傅里叶变换部33在从信号提取部31接受1个以上的第2解调信号s2后,对各个第2解调信号s2进行fft,由此,将各个第2解调信号s2转换成频域的信号fs2(图7的步骤st2)。
170.傅里叶变换部33将1个以上的频域的信号fs1和1个以上的频域的信号fs2向积分部34输出。
171.积分部34在从傅里叶变换部33接受多个频域的信号fs1后,对多个频域的信号fs1进行非相干积分(图7的步骤st3)。
172.积分部34在从傅里叶变换部33接受多个频域的信号fs2后,对多个频域的信号fs2进行非相干积分(图7的步骤st3)。
173.积分部34将第1积分信号ic1作为频域的信号fs1的非相干积分结果向目标候选检测部35输出,将第2积分信号ic2作为频域的信号fs2的非相干积分结果向目标候选检测部35输出。
174.如果从傅里叶变换部33输出的频域的信号fs1的数量为1个,则积分部34将频域的信号fs1作为第1积分信号ic1向目标候选检测部35输出。
175.此外,如果从傅里叶变换部33输出的频域的信号fs2的数量为1个,则积分部34将频域的信号fs2作为第2积分信号ic2向目标候选检测部35输出。
176.目标候选检测部35在从积分部34接受第1积分信号ic1后,例如通过实施使用第1积分信号ic1的cfar处理来计算表示目标候选的振幅的第1目标信号m1(θ
tgt
)(图7的步骤st4)。
177.目标候选检测部35在从积分部34接受第2积分信号ic2后,例如通过实施使用第2积分信号ic2的cfar处理来计算表示目标候选的振幅的第2目标信号m2(θ
tgt
)(图7的步骤st4)。cfar处理本身是公知的技术,因此省略详细的说明。
178.目标候选检测部35将第1目标信号m1(θ
tgt
)及第2目标信号m2(θ
tgt
)中的每一个向仰角计算处理部36输出。
179.仰角计算处理部36在从目标候选检测部35接受第1目标信号m1(θ
tgt
)和第2目标信号m2(θ
tgt
)后,如以下的式(1)所示那样计算第1目标信号m1(θ
tgt
)与第2目标信号m2(θ
tgt
)的和信号∑(θ
tgt
)(图7的步骤st5)。
180.∑(θ
tgt
)=m1(θ
tgt
)+m2(θ
tgt
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
181.此外,仰角计算处理部36如以下的式(2)所示那样计算第1目标信号m1(θ
tgt
)与第2目标信号m2(θ
tgt
)的差信号δ(θ
tgt
)(图7的步骤st6)。
182.δ(θ
tgt
)=m1(θ
tgt
)
‑
m2(θ
tgt
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
183.如图9所示,仰角计算处理部36通过进行使用和信号∑(θ
tgt
)和差信号δ(θ
tgt
)的振幅比较单脉冲测角,计算目标的仰角θ
tgt
(图7的步骤st7)。
184.图9是示出由仰角计算处理部36进行的振幅比较单脉冲测角的说明图。在图9中,θ
tx1
是第1波束16
‑
1的主波束中的仰角的中心角度,θ
tx2
是第2波束16
‑
2的主波束中的仰角的中心角度。
185.振幅比较单脉冲测角采用如下方式:从2个天线沿互不相同的方向辐射波束,使用被目标反射后的各个波束的反射波的和各个波束的反射波的差来进行测角。
186.以下,具体地说明由仰角计算处理部36进行的振幅比较单脉冲测角。
187.仰角计算处理部36在计算出和信号∑(θ
tgt
)和差信号δ(θ
tgt
)后,如以下的式(3)所示那样计算差信号δ(θ
tgt
)与和信号∑(θ
tgt
)之比ε。
[0188][0189]
仰角计算处理部36的内部存储器存储有表示与仰角θ’对应的比ε’的离散图案(参照图10)。在图1所示的测角装置1中,仰角计算处理部36的内部存储器存储有离散图案。但是,这只不过是一例,也可以由仰角计算处理部36的外部的存储器存储离散图案。
[0190]
比ε’如以下的式(4)那样表示。
[0191][0192]
图10是示出使用离散图案的仰角θ
tgt
的计算处理的说明图。
[0193]
离散图案是表示与仰角θ’对应的比ε’的直线或曲线。仰角计算处理部36例如如果分别计算与互不相同的多个仰角θ’对应的比ε’,则能够根据与多个仰角θ’对应的比ε’来计算离散图案。离散图案的计算处理本身是公知的技术,因此省略详细的说明。
[0194]
仰角计算处理部36通过对图10所示的离散图案所表示的比ε’应用计算出的比ε,来反算与比ε对应的仰角θ
tgt
。仰角θ
tgt
的反算处理本身是公知的技术,因此省略详细的说明。
[0195]
仰角计算处理部36将反算出的目标的仰角θ
tgt
向显示器6输出。
[0196]
在图1所示的测角装置1中,仰角计算处理部36使用离散图案,计算目标的仰角θ
tgt
。但是,这只不过是一例,仰角计算处理部36也可以参照表示互不相同的多个仰角θ’与差信号δ(θ’)相对于和信号σ(θ’)之比ε’的对应关系的表,如以下所示那样来求出与计算出的比ε对应的仰角θ
tgt
。
[0197]
仰角计算处理部36在计算出差信号δ(θ
tgt
)与和信号σ(θ
tgt
)之比ε后,从表所包含的比ε’中搜索与计算出的比ε一致的比ε’。
[0198]
仰角计算处理部36将与搜索出的比ε’对应的仰角θ’作为目标的仰角θ
tgt
的计算结果向显示器6输出。
[0199]
仰角计算处理部36在与计算出的比ε一致的比ε’未包含在表中的情况下,在表所包含的比ε’中的比计算出的比ε小的比ε’中搜索最大的比ε’(以下称为“比ε’1”)。
[0200]
此外,仰角计算处理部36在表所包含的比ε’中的比计算出的比ε大的比ε’中搜索最小的比ε’(以下称为“比ε’2”)。
[0201]
仰角计算处理部36通过实施使用与搜索出的比ε
’1对应的仰角θ’和与搜索出的比ε
’2对应的仰角θ’的插值处理,来计算与计算出的比ε对应的仰角θ
tgt
。插值处理本身是公知的技术,因此省略详细的说明。
[0202]
方位角计算部5在从a/d转换器24
‑
1~24
‑
n接受数字信号25
‑
1~25
‑
n后,使用n个数字信号25
‑
1~25
‑
n,通过实施dbf处理来计算目标的方位角(图7的步骤st8)。dbf处理本身是公知的技术,因此省略详细的说明。
[0203]
方位角计算部5将计算出的目标的方位角向显示器6输出。
[0204]
这里,方位角计算部5通过实施dbf处理来计算目标的方位角但是,这只不过是一例,方位角计算部5也可以使用数字信号25
‑
1~25
‑
n,通过实施mimo处理来计算目标的方位角
[0205]
方位角计算部5通过实施dbf处理或mimo处理,能够抑制栅瓣的产生。
[0206]
此外,方位角计算部5通过实施dbf处理或mimo处理,能够扩宽方位方向的天线开口,与根据1个接收信号计算目标的方位角的情况相比,能够以高分辨率计算目标的方位角
[0207]
在图1所示的测角装置1中,方位角计算部5取得从a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n。但是,这只不过是一例,方位角计算部5也可以取得由信号提取部31提取出的第1解调信号s1或第2解调信号s2。在方位角计算部5取得第1解调信号s1或第2解调信
号s2的情况下,信号提取部31从数字信号25
‑
1~25
‑
n中的2个以上的各个数字信号25
‑
n中提取第1解调信号s1或第2解调信号s2。在以高分辨率计算目标的方位角时,期望信号提取部31从全部的数字信号25
‑
1~25
‑
n中提取n个第1解调信号s1或n个第2解调信号s2。
[0208]
方位角计算部5使用由信号提取部31提取出的2个以上的第1解调信号s1或2个以上的第2解调信号s2,通过实施dbf处理或mimo处理来计算目标的方位角
[0209]
显示器6显示从仰角计算部32输出的目标的仰角θ
tgt
及从方位角计算部5输出的目标的方位角等。
[0210]
在以上的实施方式1中,测角装置1构成为,具备:信号提取部31,其从自多个接收天线21
‑
1~21
‑
n中的1个以上的接收天线21
‑
n输出的接收信号22
‑
n中,提取包含第1反射波20
‑
1且不包含第2反射波20
‑
2的信号作为第1解调信号,并提取包含第2反射波20
‑
2且不包含第1反射波20
‑
1的信号作为第2解调信号;仰角计算部32,其通过进行使用第1解调信号与第2解调信号的和信号以及第1解调信号与第2解调信号的差信号的单脉冲测角,计算目标的仰角;以及方位角计算部5,其使用从多个接收天线21
‑
1~21
‑
n输出的接收信号22
‑
1~22
‑
n,计算目标的方位角。因此,测角装置1能够计算目标的仰角,并且与利用1个接收天线的情况相比,能够以高分辨率计算目标的方位角。
[0211]
在图1所示的测角装置1中,第1发送天线15
‑
1的仰角方向的设置位置与第2发送天线15
‑
2的仰角方向的设置位置如图4及图8所示是相同的。如果仰角方向的设置位置相同,则如图11所示,第1发送天线15
‑
1的相位中心o1处的z轴的位置与第2发送天线15
‑
2的相位中心o2处的z轴的位置相等。因此,在仰角方向上,在相位中心o1与相位中心o2之间不产生相位差。
[0212]
图11是示出第1发送天线15
‑
1、第2发送天线15
‑
2及接收天线21
‑
n中的各个相位中心等的说明图。
[0213]
但是,第1发送天线15
‑
1与第2发送天线15
‑
2设置在分开了间隔d的位置,因此,在第1发送天线15
‑
1至目标的距离与第2发送天线15
‑
2至目标的距离之间有时产生差。
[0214]
在第1发送天线15
‑
1至目标的距离与第2发送天线15
‑
2至目标的距离之间具有差的情况下,在方位方向上,第1解调信号s1的相位中心o1与第2解调信号s2的相位中心o2有时不同。
[0215]
如图11所示,设第1发送天线15
‑
1的相位中心o1与目标之间的距离为r1,设第2发送天线15
‑
2的相位中心o2与目标之间的距离为r2,设接收天线21
‑
n的相位中心o与目标之间的距离为r。如果距离r1与距离r的距离差为δr1,距离r2与距离r的距离差为δr2,则距离差δr1与距离差δr2之间的偏差成为相位中心o1与相位中心o2之间的方位方向的相位差。
[0216]
假设接收天线21
‑
n的相位中心o为相位基准点。例如设想如下情况:第1发送天线15
‑
1的相位中心o1与相位基准点在方位方向上分离了
‑
d/2的距离,第2发送天线15
‑
2的相位中心o2与相位基准点在方位方向上分离了+d/2的距离。
[0217]
在该情况下,第1发送天线15
‑
1的阵列响应向量v1如以下的式(5)那样表示,第2发送天线15
‑
2的阵列响应向量v2如以下的式(6)那样表示。
[0218]
[0219][0220]
在式(5)及式(6)中,λ是第1波束16
‑
1及第2波束16
‑
2中的各自的中心频率下的波长。
[0221]
例如,通过对第1解调信号s1乘以阵列响应向量v1(s1×
v1),对第2解调信号s2乘以阵列响应向量v2(s2×
v2),以第1发送天线15
‑
1与第2发送天线15
‑
2的x轴的位置虚拟地配置在相同的位置的方式进行相位补偿。
[0222]
如果信号提取部31以第1发送天线15
‑
1与第2发送天线15
‑
2的x轴的位置虚拟地配置在相同的位置的方式进行相位补偿,则仰角计算部32计算仰角θ
tgt
的计算精度有时提高。
[0223]
但是,在接收天线21
‑
n的相位中心o与目标之间的距离r相比于第1发送天线15
‑
1与第2发送天线15
‑
2之间的间隔d足够大的情况下(r>>d),能够使用远场近似,因此,能够将第1解调信号s1及第2解调信号s2分别看作平面波。在该情况下,即便信号提取部31不以第1发送天线15
‑
1与第2发送天线15
‑
2的x轴的位置虚拟地配置在相同的位置的方式进行相位补偿,也几乎对测角没有影响。
[0224]
实施方式2.
[0225]
在图1所示的测角装置1中,波束发送部2在相同时刻辐射第1波束16
‑
1和第2波束16
‑
2。
[0226]
在实施方式2中,针对波束发送部2以分时的方式辐射第1波束16
‑
1和第2波束16
‑
2的测角装置1进行说明。
[0227]
在实施方式2的测角装置1中,为了方便说明,设为波束发送部2辐射第1波束16
‑
1之后,辐射第2波束16
‑
2。
[0228]
实施方式2的测角装置1的结构与实施方式1同样是图1。但是,在波束发送部2以分时的方式辐射第1波束16
‑
1和第2波束16
‑
2的情况下,能够在不对局部振荡信号分别赋予第1码c1及第2码c2的状态下分别提取第1解调信号s1及第2解调信号s2。因此,测角装置1也可以不安装码调制部12,但由于也可以对局部振荡信号分别赋予第1码c1及第2码c2,因此,测角装置1也可以安装码调制部12。
[0229]
首先,第1发送天线15
‑
1与实施方式1同样地向空间辐射第1波束16
‑
1。
[0230]
从第1发送天线15
‑
1辐射的第1波束16
‑
1被目标反射,被目标反射后的第1波束16
‑
1作为第1反射波20
‑
1被接收天线21
‑
1~21
‑
n分别接收。
[0231]
接收天线21
‑
n(n=1、
···
、n)在接收到第1反射波20
‑
1时,将包含第1反射波20
‑
1的接收信号22
‑
n向接收器23
‑
n输出。
[0232]
接收器23
‑
n使用从局部振荡信号生成部11输出的局部振荡信号,将从接收天线21
‑
n输出的接收信号22
‑
n的频率例如从rf频率降低到if频率。
[0233]
接收器23
‑
n将频率降低后的接收信号22
‑
n向a/d转换器24
‑
n输出。
[0234]
a/d转换器24
‑
n在从接收器23
‑
n接受频率降低后的接收信号22
‑
n后,将频率降低后的接收信号22
‑
n从模拟信号转换成数字信号25
‑
n,将数字信号25
‑
n向信号处理器4及方位角计算部5分别输出。
[0235]
信号提取部31将从a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n中的1个以上的各个数字信号25
‑
n作为第1解调信号s1向仰角计算部32输出。
[0236]
方位角计算部5在从a/d转换器24
‑
1~24
‑
n接受数字信号25
‑
1~25
‑
n后,与实施方式1同样地使用数字信号25
‑
1~25
‑
n,通过实施dbf处理或mimo处理来计算目标的方位角
[0237]
接着,第2发送天线15
‑
2与实施方式1同样地向空间辐射第2波束16
‑
2。
[0238]
从第2发送天线15
‑
2辐射的第2波束16
‑
2被目标反射,被目标反射后的第2波束16
‑
2作为第2反射波20
‑
2被接收天线21
‑
1~21
‑
n分别接收。
[0239]
接收天线21
‑
n在接收到第2反射波20
‑
2时,将包含第2反射波20
‑
2的接收信号22
‑
n向接收器23
‑
n输出。
[0240]
接收器23
‑
n使用从局部振荡信号生成部11输出的局部振荡信号,将从接收天线21
‑
n输出的接收信号22
‑
n的频率例如从rf频率降低到if频率。
[0241]
接收器23
‑
n将频率降低后的接收信号22
‑
n向a/d转换器24
‑
n输出。
[0242]
a/d转换器24
‑
n在从接收器23
‑
n接受频率降低后的接收信号22
‑
n后,将频率降低后的接收信号22
‑
n从模拟信号转换成数字信号25
‑
n,将数字信号25
‑
n向信号处理器4及方位角计算部5分别输出。
[0243]
信号提取部31将从a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n中的1个以上的各个数字信号25
‑
n作为第2解调信号s2向仰角计算部32输出。
[0244]
方位角计算部5在从a/d转换器24
‑
1~24
‑
n接受数字信号25
‑
1~25
‑
n后,与实施方式1同样地使用数字信号25
‑
1~25
‑
n,通过实施dbf处理或mimo处理来计算目标的方位角
[0245]
仰角计算部32的处理内容与实施方式1同样,因此,省略详细的说明。
[0246]
即便是具备以分时的方式辐射第1波束16
‑
1和第2波束16
‑
2的波束发送部2的测角装置1,也与实施方式1的测角装置1同样,能够计算目标的仰角,并且与利用1个接收天线的情况相比,能够以高分辨率计算目标的方位角。
[0247]
测角装置1在不安装码调制部12的情况下,与实施方式1的测角装置1相比,减轻了处理负荷。
[0248]
实施方式3.
[0249]
在图1所示的测角装置1中,从第1发送天线15
‑
1辐射的第1波束16
‑
1的频率与从第2发送天线15
‑
2辐射的第2波束16
‑
2的频率大致相同。
[0250]
在实施方式3中,针对从第1发送天线15
‑
1辐射的第1波束16
‑
1的频率与从第2发送天线15
‑
2辐射的第2波束16
‑
2的频率不同的测角装置1进行说明。
[0251]
设第1波束16
‑
1的频率为第1频率,设第2波束16
‑
2的频率为第2频率。
[0252]
实施方式3的测角装置1的结构与实施方式1同样是图1。但是,在从第1发送天线15
‑
1辐射的第1波束16
‑
1的频率与从第2发送天线15
‑
2辐射的第2波束16
‑
2的频率不同的情况下,能够在不对局部振荡信号分别赋予第1码c1及第2码c2的状态下分别提取第1解调信号s1及第2解调信号s2。因此,测角装置1也可以不安装码调制部12,但由于也可以对局部振荡信号分别赋予第1码c1及第2码c2,因此,测角装置1也可以安装码调制部12。
[0253]
波束接收部3与实施方式1同样地进行动作。
[0254]
信号提取部31通过对从a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n中的1个以上的各个数字信号25
‑
n例如进行fft,将各个数字信号25
‑
n转换成频域的信号。
[0255]
信号提取部31从各个频域的信号中提取第1频率的信号,从各个频域的信号中提取第2频率的信号。
[0256]
信号提取部31通过对提取出的各个第1频率的信号例如进行逆fft,将各个第1频率的信号转换成时间区域的信号,将各个时间区域的信号作为第1解调信号s1向仰角计算部32输出。
[0257]
此外,信号提取部31通过对提取出的各个第2频率的信号例如进行逆fft,将各个第2频率的信号转换成时间区域的信号,将各个时间区域的信号作为第2解调信号s2向仰角计算部32输出。
[0258]
这里,信号提取部31将时间区域的信号作为第1解调信号s1向仰角计算部32输出,将时间区域的信号作为第2解调信号s2向仰角计算部32输出。但是,这只不过是一例,如果信号提取部31将提取出的各个第1频率的信号向仰角计算部32输出,并将提取出的各个第2频率的信号向仰角计算部32输出,则不需要仰角计算部32的傅里叶变换部33。
[0259]
方位角计算部5在从a/d转换器24
‑
1~24
‑
n接受数字信号25
‑
1~25
‑
n后,与实施方式1同样地使用数字信号25
‑
1~25
‑
n,通过实施dbf处理来计算目标的方位角
[0260]
方位角计算部5也可以在使用数字信号25
‑
1~25
‑
n实施dbf处理等之前,例如通过与信号提取部31同样的方法,从全部的数字信号25
‑
1~25
‑
n中提取第1解调信号s1或第2解调信号s2。
[0261]
方位角计算部5在提取出n个第1解调信号s1或n个第2解调信号s2的情况下,使用n个第1解调信号s1或n个第2解调信号s2,实施dbf处理或mimo处理。
[0262]
即便是从第1发送天线15
‑
1辐射的第1波束16
‑
1的频率与从第2发送天线15
‑
2辐射的第2波束16
‑
2的频率不同的测角装置1,也与实施方式1的测角装置1同样,能够计算目标的仰角,并且与利用1个接收天线的情况相比,能够以高分辨率计算目标的方位角。
[0263]
测角装置1在不安装码调制部12的情况下,与实施方式1的测角装置1相比,减轻了处理负荷。
[0264]
实施方式4.
[0265]
在图1所示的测角装置1中,具备具有1个天线开口15
‑
1a的第1发送天线15
‑
1和具有1个天线开口15
‑
2a的第2发送天线15
‑
2。
[0266]
在实施方式4中,针对如下的测角装置1进行说明,该测角装置1具备在仰角方向上具有2个天线开口的第1发送天线61
‑
1和在仰角方向上具有2个天线开口的第2发送天线61
‑
2。
[0267]
图12是示出实施方式4的测角装置1的结构图。在图12中,与图1相同的标号表示相同或相当的部分,因此省略说明。
[0268]
图13是示出第1发送天线61
‑
1、第2发送天线61
‑
2及接收天线21
‑
1~21
‑
n的配置例的说明图。
[0269]
图14及图15是示出第1波束62
‑
3的辐射方向的仰角角度θ
b3
及第2波束62
‑
4的辐射方向的仰角角度θ
b4
的一例的说明图。
[0270]
在图15中,为了容易理解仰角角度θ
b3
与仰角角度θ
b4
是相同的角度,表记为第1发送天线61
‑
1与第2发送天线61
‑
2设置在相同的位置。
[0271]
第1发送天线61
‑
1具有2个天线元件61
‑1‑
1、61
‑1‑
2,在仰角方向上具有2个天线开
口61
‑1‑
1a、61
‑1‑
2a。
[0272]
2个天线开口61
‑1‑
1a、61
‑1‑
2a中的前端侧的天线开口61
‑1‑
1a是第1天线开口,基端侧的天线开口61
‑1‑
2a是第2天线开口。
[0273]
第1发送天线61
‑
1从天线开口61
‑1‑
1a向空间辐射第3波束62
‑
3。
[0274]
在图12所示的测角装置1中,第1发送天线61
‑
1从天线开口61
‑1‑
1a向空间辐射第3波束62
‑
3。但是,这只不过是一例,第1发送天线61
‑
1也可以从天线开口61
‑1‑
2a向空间辐射第5波束。
[0275]
第2发送天线61
‑
2具有2个天线元件61
‑2‑
1、61
‑2‑
2,在仰角方向上具有2个天线开口61
‑2‑
1a、61
‑2‑
2a。
[0276]
2个天线开口61
‑2‑
1a、61
‑2‑
2a中的前端侧的天线开口61
‑2‑
1a是第3天线开口,基端侧的天线开口61
‑2‑
2a是第4天线开口。
[0277]
第2发送天线61
‑
2在从天线开口61
‑1‑
1a辐射第3波束62
‑
3的情况下,从天线开口61
‑2‑
2a向空间辐射第4波束62
‑
4。
[0278]
第2发送天线61
‑
2在从天线开口61
‑1‑
2a辐射第5波束的情况下,从天线开口61
‑2‑
1a向空间辐射第6波束。
[0279]
在图14及图15的例子中,从天线开口61
‑1‑
1a辐射第3波束62
‑
3,从天线开口61
‑2‑
2a辐射第4波束62
‑
4。
[0280]
如图13及图14所示,第1发送天线61
‑
1的仰角方向的设置位置与第2发送天线61
‑
2的仰角方向的设置位置相同。
[0281]
如图13及图14所示,第1发送天线61
‑
1的方位方向的设置位置与第2发送天线61
‑
2的方位方向的设置位置不同。
[0282]
在图13及图14的例子中,第1发送天线61
‑
1与第2发送天线61
‑
2的配置间隔为d。
[0283]
第3波束62
‑
3的辐射方向的仰角角度如图14及图15所示那样为θ
b3
,第4波束62
‑
4的辐射方向的仰角角度如图14及图15所示那样为θ
b4
,θ
b3
=θ
b4
。
[0284]
第5波束的辐射方向的仰角角度与第6波束的辐射方向的仰角角度是相同的角度。
[0285]
在图12所示的测角装置1中,假设在相同时刻从第1发送天线61
‑
1及第2发送天线61
‑
2分别辐射第3波束62
‑
3和第4波束62
‑
4。
[0286]
从第3发送天线62
‑
3辐射的第3波束62
‑
3被目标反射,被目标反射后的第3波束62
‑
3作为第3反射波70
‑
3被接收天线21
‑
1~21
‑
n分别接收。
[0287]
从第2发送天线61
‑
2辐射的第4波束62
‑
4被目标反射,被目标反射后的第4波束62
‑
4作为第4反射波70
‑
4被接收天线21
‑
1~21
‑
n分别接收。
[0288]
第1发送天线61
‑
1也可以从天线开口61
‑1‑
2a辐射第5波束而取代第3波束62
‑
3,第2发送天线61
‑
2也可以从天线开口61
‑2‑
1a辐射第6波束而取代第4波束62
‑
4。
[0289]
在相同时刻从第1发送天线61
‑
1及第2发送天线61
‑
2分别辐射了第5波束和第6波束的情况下,第5波束被目标反射,被目标反射后的第5波束作为第5反射波被接收天线21
‑
1~21
‑
n分别接收。
[0290]
第6波束被目标反射,被目标反射后的第6波束作为第6反射波被接收天线21
‑
1~21
‑
n分别接收。
[0291]
接收天线21
‑
n(n=1、
···
、n)在接收到第3反射波70
‑
3及第4反射波70
‑
4中的每
一个时,将包含第3反射波70
‑
3和第4反射波70
‑
4的接收信号22
‑
n向接收器23
‑
n输出。
[0292]
如图16所示,信号处理器7具备信号提取部71及仰角计算部72。
[0293]
图16是示出实施方式4的测角装置1中的信号处理器7的结构图。在图16中,与图5相同的标号表示相同或相当的部分,因此省略说明。
[0294]
信号提取部71例如通过图2所示的信号提取电路41来实现。
[0295]
信号提取部71例如具有存储有第1码c1及第2码c2的内部存储器。
[0296]
信号提取部71使用第1码c1,从自a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n中的1个以上的各个数字信号25
‑
n中提取第1解调信号s1。
[0297]
此外,信号提取部71使用第2码c2,从1个以上的各个数字信号25
‑
n中提取第2解调信号s2。
[0298]
信号提取部71基于接收天线21
‑
n与第1发送天线61
‑
1之间的方位方向的距离、接收天线21
‑
n与第2发送天线61
‑
2之间的方位方向的距离、以及天线元件61
‑1‑
1的相位中心与天线元件61
‑2‑
2的相位中心的仰角方向的距离,补偿第1解调信号s1的相位及第2解调信号s2的相位中的每一个。
[0299]
接收天线21
‑
n是将第1解调信号s1及第2解调信号s2中的各个提取源的接收信号22
‑
n输出的接收天线。
[0300]
信号提取部71将补偿了相位的1个以上的第1解调信号s1和补偿了相位的1个以上的第2解调信号s2向仰角计算部72输出。
[0301]
在图12所示的测角装置1中,第1解调信号s1是包含第3反射波70
‑
3且不包含第4反射波70
‑
4的信号,第2解调信号s2是包含第4反射波70
‑
4且不包含第3反射波70
‑
3的信号。
[0302]
这里,信号提取部71具有存储有第1码c1及第2码c2的内部存储器。但是,这只不过是一例,信号提取部71也可以从外部被分别被提供第1码c1及第2码c2。
[0303]
仰角计算部72具备傅里叶变换部33、积分部34、目标候选检测部35及仰角计算处理部73。
[0304]
仰角计算部72通过进行使用第1解调信号s1与第2解调信号s2的和信号以及第1解调信号s1与第2解调信号s2的差信号的单脉冲测角,来计算目标的仰角θ
tgt
。
[0305]
仰角计算部72将计算出的目标的仰角θ
tgt
向显示器6输出。
[0306]
仰角计算处理部73例如通过图2所示的仰角计算处理电路45来实现。
[0307]
仰角计算处理部73计算从目标候选检测部35输出的第1目标信号m1(θ
tgt
)与第2目标信号m2(θ
tgt
)的和信号σ(θ
tgt
)。
[0308]
仰角计算处理部73计算从目标候选检测部35输出的第1目标信号m1(θ
tgt
)与第2目标信号m2(θ
tgt
)的差信号δ(θ
tgt
)。
[0309]
仰角计算处理部73通过进行使用和信号σ(θ
tgt
)和差信号δ(θ
tgt
)的相位比较单脉冲测角,来计算目标的仰角θ
tgt
。
[0310]
仰角计算处理部73将计算出的目标的仰角θ
tgt
向显示器6输出。
[0311]
在图12及图16中,设想作为信号处理器7的结构要素的信号提取部71、傅里叶变换部33、积分部34、目标候选检测部35及仰角计算处理部73、以及方位角计算部5分别通过图2所示的专用的硬件来实现。即,设想信号处理器7的结构要素及方位角计算部5通过信号提取电路41、傅里叶变换电路42、积分电路43、目标候选检测电路44、仰角计算处理电路45及
方位角计算电路46来实现。
[0312]
这里,信号提取电路41、傅里叶变换电路42、积分电路43、目标候选检测电路44、仰角计算处理电路45及方位角计算电路46分别例如对应于单一电路、复合电路、程序化的处理器、并行程序化的处理器、asic、fpga、或者它们的组合。
[0313]
信号处理器7的结构要素及方位角计算部5不限于由专用的硬件实现,信号处理器7的结构要素及方位角计算部5也可以通过软件、固件、或者软件与固件的组合来实现。
[0314]
在信号处理器7的结构要素及方位角计算部5由软件或固件等实现的情况下,将用于使计算机执行信号提取部71、傅里叶变换部33、积分部34、目标候选检测部35、仰角计算处理部73及方位角计算部5的处理步骤的程序存储于图6所示的存储器51。而且,图6所示的处理器52执行存储器51所存储的程序。
[0315]
图17是示出信号处理器7及方位角计算部5的处理步骤即测角方法的流程图。
[0316]
此外,在图2中,示出信号处理器7的结构要素及方位角计算部5分别由专用的硬件实现的例子,在图6中,示出信号处理器7及方位角计算部5由软件或固件等实现的例子。但是,这只不过是一例,也可以是,信号处理器7中的一部分结构要素或方位角计算部5由专用的硬件实现,剩余的结构要素由软件或固件等实现。
[0317]
接着,对图12所示的测角装置1的动作进行说明。
[0318]
在图12所示的测角装置1中,第1发送天线61
‑
1从天线开口61
‑1‑
1a向空间辐射第3波束62
‑
3,第2发送天线61
‑
2从天线开口61
‑2‑
2a向空间辐射第4波束62
‑
4。
[0319]
从第1发送天线61
‑
1辐射的第3波束62
‑
3被目标反射,被目标反射后的第3波束62
‑
3作为第3反射波70
‑
3被接收天线21
‑
1~21
‑
n分别接收。
[0320]
从第2发送天线61
‑
2辐射的第4波束62
‑
4被目标反射,被目标反射后的第4波束62
‑
4作为第4反射波70
‑
4被接收天线21
‑
1~21
‑
n分别接收。
[0321]
接收天线21
‑
n(n=1、
···
、n)在接收到第3反射波70
‑
3及第4反射波70
‑
4中的每一个时,将包含第3反射波70
‑
3和第4反射波70
‑
4的接收信号22
‑
n向接收器23
‑
n输出。
[0322]
接收器23
‑
n使用从局部振荡信号生成部11输出的局部振荡信号,将从接收天线21
‑
n输出的接收信号22
‑
n的频率例如从rf频率降低到if频率。
[0323]
接收器23
‑
n将频率降低后的接收信号22
‑
n向a/d转换器24
‑
n输出。
[0324]
a/d转换器24
‑
n在从接收器23
‑
n接受频率降低后的接收信号22
‑
n后,将频率降低后的接收信号22
‑
n从模拟信号转换成数字信号25
‑
n,将数字信号25
‑
n向信号处理器7及方位角计算部5分别输出。
[0325]
信号提取部71使用第1码c1,从自a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n中的1个以上的各个数字信号25
‑
n中,提取第1解调信号s1(图17的步骤st11)。
[0326]
信号提取部71从1个以上的各个数字信号25
‑
n中提取第1解调信号s1即可。因此,信号提取部71可以从任意的1个数字信号25
‑
n中提取第1解调信号s1,也可以从任意的2个数字信号25
‑
n中分别提取第1解调信号s1。此外,信号提取部71也可以从n个数字信号25
‑
1~25
‑
n中分别提取第1解调信号s1。
[0327]
信号提取部71使用第2码c2,从自a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n中的1个以上的各个数字信号25
‑
n中提取第2解调信号s2(图17的步骤st11)。
[0328]
信号提取部71从1个以上的各个数字信号25
‑
n中提取第2解调信号s2即可。因此,
信号提取部71可以从任意的1个数字信号25
‑
n中提取第2解调信号s2,也可以从任意的2个数字信号25
‑
n中分别提取第2解调信号s2。此外,信号提取部71也可以从n个数字信号25
‑
1~25
‑
n中分别提取第2解调信号s2。
[0329]
信号提取部71基于接收天线21
‑
n与第1发送天线61
‑
1之间的距离、接收天线21
‑
n与第2发送天线61
‑
2之间的距离、以及天线元件61
‑1‑
1的相位中心与天线元件61
‑2‑
2的相位中心的仰角方向的距离,补偿第1解调信号s1的相位及第2解调信号s2的相位中的每一个。
[0330]
接收天线21
‑
n是将第1解调信号s1及第2解调信号s2中的各个提取源的接收信号22
‑
n输出的接收天线。
[0331]
以下,具体说明由信号提取部71进行的相位补偿处理。
[0332]
由后述的仰角计算处理部73进行的相位比较单脉冲测角是利用通过辐射波束的2个天线的仰角方向的设置位置的差h和目标的仰角θ
tgt
而产生的接收信号22
‑
n的相位差的测角。
[0333]
如图18所示,差h是天线元件61
‑1‑
1的相位中心o3‑1处的仰角方向的位置与天线元件61
‑2‑
2的相位中心o4‑2处的仰角方向的位置之差。相位中心o3‑1处的仰角方向的位置是天线开口61
‑1‑
1a处的仰角方向的位置。相位中心o4‑2处的仰角方向的位置是天线开口61
‑2‑
2a处的仰角方向的位置。
[0334]
图18是示出由仰角计算处理部73进行的相位比较单脉冲测角的说明图。
[0335]
接收信号22
‑
n通过天线元件61
‑1‑
1的相位中心o3‑1处的方位方向的位置与天线元件61
‑2‑
2的相位中心o4‑2处的方位方向的位置之差而产生相位差。相位中心o3‑1处的方位方向的位置是天线开口61
‑1‑
1a处的方位方向的位置。相位中心o4‑2处的方位方向的位置是天线开口61
‑2‑
2a处的方位方向的位置。
[0336]
在仰角计算处理部73进行相位比较单脉冲测角的情况下,如果由于方位方向的位置的差而在接收信号22
‑
n中未产生相位差,则若存在设置位置的差h,就能够正确地对目标的仰角θ
tgt
进行测角。
[0337]
但是,在由于方位方向的位置的差而在接收信号22
‑
n中产生相位差的情况下,即便仰角计算处理部73进行相位比较单脉冲测角,有时也无法准确地对目标的仰角θ
tgt
进行测角。
[0338]
设接收天线21
‑
n的相位中心o为相位基准点。例如,天线元件61
‑1‑
1的相位中心o3‑1从相位基准点在方位方向上分离了
‑
d/2的距离,从相位基准点在仰角方向上分离了+h/2。而且,设想天线元件61
‑2‑
2的相位中心o4‑2从相位基准点在方位方向上分离了+d/2的距离且从相位基准点在仰角方向上分离了
‑
h/2的情况。
[0339]
在该情况下,天线元件61
‑1‑
1的阵列响应向量v3如以下的式(7)那样表示,天线元件61
‑2‑
2的阵列响应向量v4如以下的式(8)那样表示。
[0340][0341][0342]
例如,通过对第1解调信号s1乘以阵列响应向量v3(s1×
v3),对第2解调信号s2乘以阵列响应向量v4(s2×
v4),以第1发送天线61
‑
1与第2发送天线61
‑
2的x轴的位置虚拟地配置
在相同的位置的方式进行相位补偿。
[0343]
如果信号提取部71以第1发送天线61
‑
1与第2发送天线61
‑
2的x轴的位置虚拟地配置在相同的位置的方式进行相位补偿,则仰角计算部72计算仰角θ
tgt
的计算精度有时提高。
[0344]
信号提取部71将补偿了相位的1个以上的第1解调信号s1和补偿了相位的1个以上的第2解调信号s2向傅里叶变换部33输出。
[0345]
但是,在接收天线21
‑
n的相位中心o与目标之间的距离r相比于第1发送天线61
‑
1与第2发送天线61
‑
2之间的间隔d足够大的情况下(r>>d),能够使用远场近似,因此,能够将第1解调信号s1及第2解调信号s2分别看作平面波。在该情况下,即便信号提取部71不以第1发送天线61
‑
1与第2发送天线61
‑
2的x轴的位置虚拟地配置在相同的位置的方式进行相位补偿,也几乎对测角没有影响。
[0346]
傅里叶变换部33在从信号提取部71接受1个以上的第1解调信号s1后,对各个第1解调信号s1进行fft,由此,将各个第1解调信号s1转换成频域的信号fs1(图17的步骤st12)。
[0347]
傅里叶变换部33在从信号提取部71接受1个以上的第2解调信号s2后,对各个第2解调信号s2进行fft,由此,将各个第2解调信号s2转换成频域的信号fs2(图17的步骤st12)。
[0348]
傅里叶变换部33将1个以上的频域的信号fs1和1个以上的频域的信号fs2向积分部34输出。
[0349]
积分部34在从傅里叶变换部33接受多个频域的信号fs1后,对多个频域的信号fs1进行非相干积分(图17的步骤st13)。
[0350]
积分部34在从傅里叶变换部33接受多个频域的信号fs2后,对多个频域的信号fs2进行非相干积分(图17的步骤st13)。
[0351]
积分部34将第1积分信号ic1作为频域的信号fs1的非相干积分结果向目标候选检测部35输出,将第2积分信号ic2作为频域的信号fs2的非相干积分结果向目标候选检测部35输出。
[0352]
如果从傅里叶变换部33输出的频域的信号fs1的数量为1个,则积分部34将频域的信号fs1作为第1积分信号ic1向目标候选检测部35输出。
[0353]
此外,如果从傅里叶变换部33输出的频域的信号fs2的数量为1个,则积分部34将频域的信号fs2作为第2积分信号ic2向目标候选检测部35输出。
[0354]
目标候选检测部35在从积分部34接受第1积分信号ic1后,例如,通过实施使用第1积分信号ic1的cfar处理,来计算表示目标候选的振幅的第1目标信号m1(θ
tgt
)(图17的步骤st14)。
[0355]
目标候选检测部35在从积分部34接受第2积分信号ic2后,例如,通过实施使用第2积分信号ic2的cfar处理,来计算表示目标候选的振幅的第2目标信号m2(θ
tgt
)(图17的步骤st14)。
[0356]
目标候选检测部35将第1目标信号m1(θ
tgt
)及第2目标信号m2(θ
tgt
)中的每一个向仰角计算处理部73输出。
[0357]
仰角计算处理部73在从目标候选检测部35接受第1目标信号m1(θ
tgt
)和第2目标信号m2(θ
tgt
)后,如以下的式(9)所示,计算第1目标信号m1(θ
tgt
)与第2目标信号m2(θ
tgt
)的和信号σ(θ
tgt
)(图17的步骤st15)。
[0358][0359]
在式(9)中,m
tgt
为目标信号的振幅。
[0360]
此外,仰角计算处理部73如以下的式(10)所示那样计算第1目标信号m1(θ
tgt
)与第2目标信号m2(θ
tgt
)的差信号δ(θ
tgt
)(图17的步骤st16)。
[0361][0362]
和信号σ(θ
tgt
)和差信号δ(θ
tgt
)的振幅m
tgt
相等,相位差γ
tgt
不同。
[0363]
基于接收信号22
‑
n的相位差γ
tgt
而产生的仰角θ
tgt
的角度误差ρ如以下的式(11)那样表示。
[0364][0365]
此外,由于天线元件61
‑1‑
1的相位中心o1与天线元件61
‑2‑
2的相位中心o2在仰角方向上分离了距离h,因此,接收信号22
‑
n的相位差γ
tgt
如以下的式(12)那样由距离h和目标的仰角θ
tgt
表示。
[0366][0367]
根据式(11)及式(12),目标的仰角θ
tgt
如以下的式(13)那样表示。
[0368][0369]
作为相位比较单脉冲测角,仰角计算处理部73将计算出的和信号σ(θ
tgt
)和差信号δ(θ
tgt
)代入到式(13),来计算目标的仰角θ
tgt
(图17的步骤st17)。
[0370]
仰角计算处理部73将计算出的目标的仰角θ
tgt
向显示器6输出。
[0371]
方位角计算部5在从a/d转换器24
‑
1~24
‑
n接受数字信号25
‑
1~25
‑
n后,与实施方式1同样地使用数字信号25
‑
1~25
‑
n,通过实施dbf处理来计算目标的方位角(图17的步骤st18)。
[0372]
方位角计算部5将计算出的目标的方位角向显示器6输出。
[0373]
这里,方位角计算部5通过实施dbf处理来计算目标的方位角但是,这只不过是一例,方位角计算部5也可以使用数字信号25
‑
1~25
‑
n,通过实施mimo处理来计算目标的方位角
[0374]
方位角计算部5通过实施dbf处理或mimo处理,能够抑制栅瓣的产生。
[0375]
在图12所示的测角装置1中,方位角计算部5取得从a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n。但是,这只不过是一例,方位角计算部5也可以取得由信号提取部71补偿了相位的第1解调信号s1或第2解调信号s2。在方位角计算部5取得第1解调信号s1或第2
解调信号s2的情况下,信号提取部71从数字信号25
‑
1~25
‑
n中的2个以上的各个数字信号25
‑
n中提取第1解调信号s1或第2解调信号s2,补偿第1解调信号s1的相位或第2解调信号s2的相位。在以高分辨率计算目标的方位角时,期望信号提取部71从全部的数字信号25
‑
1~25
‑
n中提取n个第1解调信号s1来补偿相位,或者提取n个第2解调信号s2来补偿相位。
[0376]
方位角计算部5使用由信号提取部31补偿了相位的n个第1解调信号s1或n个第2解调信号s2,通过实施dbf处理或mimo处理来计算目标的方位角
[0377]
显示器6显示从仰角计算部72输出的目标的仰角θ
tgt
及从方位角计算部5输出的目标的方位角等。
[0378]
根据以上,即便是具备在仰角方向上具有2个天线开口61
‑1‑
1a、61
‑1‑
2a的第1发送天线61
‑
1和在仰角方向上具有2个天线开口61
‑2‑
1a、61
‑2‑
2a的第2发送天线61
‑
2的测角装置1,也与实施方式1的测角装置1同样,能够计算目标的仰角,并与利用1个接收天线的情况相比,能够以高分辨率计算目标的方位角。
[0379]
在图12所示的测角装置1中,第1发送天线61
‑
1具有2个天线开口61
‑1‑
1a、61
‑1‑
2a,第2发送天线61
‑
2具有2个天线开口61
‑2‑
1a、61
‑2‑
2a。但是,这只不过是一例,如图19所示,也可以是第1发送天线61
‑
1具有2个天线开口61
‑1‑
1a、61
‑1‑
2a,第2发送天线61
‑
2仅具有1个天线开口61
‑2‑
2a。
[0380]
图19是示出第1发送天线61
‑
1、第2发送天线61
‑
2及接收天线21
‑
1~21
‑
n的配置例的说明图。
[0381]
第2发送天线61
‑
2具有1个天线元件61
‑2‑
2,并具有1个天线开口61
‑2‑
2a。
[0382]
在图19的例子中,第1发送天线61
‑
1从2个天线开口61
‑1‑
1a、61
‑1‑
2a中的天线开口61
‑1‑
1a辐射第3波束62
‑
3,第2发送天线61
‑
2从天线开口61
‑2‑
2a辐射第4波束62
‑
4。
[0383]
第2发送天线61
‑
2具有的天线开口61
‑2‑
2a与天线开口61
‑1‑
1a在仰角方向上分离了距离h。
[0384]
第2发送天线61
‑
2的长度是第1发送天线61
‑
1的长度的一半。
[0385]
如图19所示,第1发送天线61
‑
1的方位方向的设置位置与第2发送天线61
‑
2的方位方向的设置位置不同。
[0386]
在图19的例子中,第1发送天线61
‑
1与第2发送天线61
‑
2的配置间隔为d。
[0387]
第3波束62
‑
3的辐射方向的仰角角度θ
b3
与第4波束62
‑
4的辐射方向的仰角角度θ
b4
为相同的角度。是θ
b3
=θ
b4
。
[0388]
即便是具备仅具有1个天线开口61
‑2‑
2a的第2发送天线61
‑
2的测角装置1,也能够计算目标的仰角,并且与利用1个接收天线的情况相比,能够以高分辨率计算目标的方位角。
[0389]
实施方式5.
[0390]
在图12所示的测角装置1中,波束发送部2在相同时刻辐射第3波束62
‑
3和第4波束62
‑
4。
[0391]
在实施方式5中,针对波束发送部2以分时的方式辐射第3波束62
‑
3和第4波束62
‑
4的测角装置1进行说明。
[0392]
在实施方式5的测角装置1中,为了方便说明,设为波束发送部2在辐射第3波束62
‑
3之后辐射第4波束62
‑
4。
[0393]
实施方式5的测角装置1的结构与实施方式4同样是图12。但是,在波束发送部2以分时的方式辐射第3波束62
‑
3和第4波束62
‑
4的情况下,能够在不对局部振荡信号分别赋予第1码c1及第2码c2的状态下分别提取第1解调信号s1及第2解调信号s2。因此,测角装置1也可以不安装码调制部12,但由于也可以对局部振荡信号分别赋予第1码c1及第2码c2,因此,测角装置1也可以安装码调制部12。
[0394]
首先,第1发送天线61
‑
1与实施方式4同样地向空间辐射第3波束62
‑
3。
[0395]
从第1发送天线61
‑
1辐射的第3波束62
‑
3被目标反射,被目标反射后的第3波束62
‑
3作为第3反射波70
‑
3被接收天线21
‑
1~21
‑
n分别接收。
[0396]
接收天线21
‑
n(n=1、
···
、n)在接收到第3反射波70
‑
3时,将包含第3反射波70
‑
3的接收信号22
‑
n向接收器23
‑
n输出。
[0397]
接收器23
‑
n使用从局部振荡信号生成部11输出的局部振荡信号,将从接收天线21
‑
n输出的接收信号22
‑
n的频率例如从rf频率降低到if频率。
[0398]
接收器23
‑
n将频率降低后的接收信号22
‑
n向a/d转换器24
‑
n输出。
[0399]
a/d转换器24
‑
n在从接收器23
‑
n接受频率降低后的接收信号22
‑
n后,将频率降低后的接收信号22
‑
n从模拟信号转换成数字信号25
‑
n,将数字信号25
‑
n向信号处理器7及方位角计算部5分别输出。
[0400]
信号提取部71将从a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n中的1个以上的各个数字信号25
‑
n作为第1解调信号s1向仰角计算部72输出。
[0401]
方位角计算部5在从a/d转换器24
‑
1~24
‑
n接受数字信号25
‑
1~25
‑
n后,与实施方式1同样地使用数字信号25
‑
1~25
‑
n,通过实施dbf处理或mimo处理来计算目标的方位角
[0402]
接着,第2发送天线61
‑
2向空间辐射第4波束62
‑
4。
[0403]
从第2发送天线61
‑
2辐射的第4波束62
‑
4被目标反射,被目标反射后的第4波束62
‑
4作为第4反射波70
‑
4被接收天线21
‑
1~21
‑
n分别接收。
[0404]
接收天线21
‑
n在接收到第4反射波70
‑
4时,将包含第4反射波70
‑
4的接收信号22
‑
n向接收器23
‑
n输出。
[0405]
接收器23
‑
n使用从局部振荡信号生成部11输出的局部振荡信号,将从接收天线21
‑
n输出的接收信号22
‑
n的频率例如从rf频率降低到if频率。
[0406]
接收器23
‑
n将频率降低后的接收信号22
‑
n向a/d转换器24
‑
n输出。
[0407]
a/d转换器24
‑
n在从接收器23
‑
n接受频率降低后的接收信号22
‑
n后,将频率降低后的接收信号22
‑
n从模拟信号转换成数字信号25
‑
n,将数字信号25
‑
n向信号处理器7及方位角计算部5分别输出。
[0408]
信号提取部71将从a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n中的1个以上的各个数字信号25
‑
n作为第2解调信号s2向仰角计算部72输出。
[0409]
方位角计算部5在从a/d转换器24
‑
1~24
‑
n接受数字信号25
‑
1~25
‑
n后,与实施方式1同样地使用数字信号25
‑
1~25
‑
n,通过实施dbf处理或mimo处理来计算目标的方位角
[0410]
仰角计算部72的处理内容与实施方式4同样,因此省略详细的说明。
[0411]
即便是具备以分时的方式辐射第3波束62
‑
3和第4波束62
‑
4的波束发送部2的测角
装置1,也与实施方式4的测角装置1同样,能够计算目标的仰角,并且与利用1个接收天线的情况相比,能够以高分辨率计算目标的方位角。
[0412]
测角装置1在不安装码调制部12的情况下,与实施方式4的测角装置1相比,减轻了处理负荷。
[0413]
实施方式6.
[0414]
在图12所示的测角装置1中,从第1发送天线61
‑
1辐射的第3波束62
‑
3的频率与从第2发送天线61
‑
2辐射的第4波束62
‑
4的频率相同。
[0415]
在实施方式6中,针对从第1发送天线61
‑
1辐射的第3波束62
‑
3的频率与从第2发送天线61
‑
2辐射的第4波束62
‑
4的频率不同的测角装置1进行说明。
[0416]
第3波束62
‑
3的频率为第1频率,第3波束62
‑
3的频率为第2频率。
[0417]
实施方式6的测角装置1的结构与实施方式4同样是图12。但是,在从第1发送天线61
‑
1辐射的第3波束62
‑
3的频率与从第2发送天线61
‑
2辐射的第4波束62
‑
4的频率不同的情况下,能够在不对局部振荡信号分别赋予第1码c1及第2码c2的状态下分别提取第1解调信号s1及第2解调信号s2。因此,测角装置1也可以不安装码调制部12,但由于也可以对局部振荡信号分别赋予第1码c1及第2码c2,因此,测角装置1也可以安装码调制部12。
[0418]
波束接收部3与实施方式4同样地进行动作。
[0419]
信号提取部71对从a/d转换器24
‑
1~24
‑
n输出的数字信号25
‑
1~25
‑
n中的1个以上的各个数字信号25
‑
n例如进行fft,由此,将各个数字信号25
‑
n转换成频域的信号。
[0420]
信号提取部71从各个频域的信号中提取第1频率的信号,从各个频域的信号中提取第2频率的信号。
[0421]
信号提取部71通过对提取出的各个第1频率的信号例如进行逆fft,将各个第1频率的信号转换成时间区域的信号,将各个时间区域的信号作为第1解调信号s1向仰角计算部72输出。
[0422]
此外,信号提取部71通过对提取出的各个第2频率的信号例如进行逆fft,将各个第2频率的信号转换成时间区域的信号,将各个时间区域的信号作为第2解调信号s2向仰角计算部72输出。
[0423]
方位角计算部5在从a/d转换器24
‑
1~24
‑
n接受数字信号25
‑
1~25
‑
n后,与实施方式4同样地使用数字信号25
‑
1~25
‑
n,通过实施dbf处理来计算目标的方位角
[0424]
方位角计算部5在使用数字信号25
‑
1~25
‑
n实施dbf处理等之前,例如也可以通过与信号提取部71同样的方法,从全部的数字信号25
‑
1~25
‑
n中提取n个第1解调信号s1或n个第2解调信号s2。
[0425]
方位角计算部5在提取出n个第1解调信号s1或n个第2解调信号s2的情况下,使用n个第1解调信号s1或n个第2解调信号s2,实施dbf处理或mimo处理。
[0426]
即便是从第1发送天线61
‑
1辐射的第3波束62
‑
3的频率与从第2发送天线61
‑
2辐射的第4波束62
‑
4的频率不同的测角装置1,也与实施方式4的测角装置1同样,能够计算目标的仰角,并且与利用1个接收天线的情况相比,能够以高分辨率计算目标的方位角。
[0427]
测角装置1在不安装码调制部12的情况下,与实施方式4的测角装置1相比,减轻了处理负荷。
[0428]
实施方式1~6中的任意的实施方式的测角装置1例如如图20所示那样包含在安装
于车辆的车载装置中。
[0429]
图20是示出包含实施方式1~6中的任意的实施方式的测角装置1的车载装置的结构图。
[0430]
包含任意的实施方式的测角装置1的车载装置使用测角装置1,以其他车辆、行人、护栏或电线杆等为目标,分别计算目标的仰角θ
tgt
及目标的方位角
[0431]
另外,本技术发明在该发明的范围内,能够进行各实施方式的自由组合、或者各实施方式的任意的结构要素的变形,或者在各实施方式中能够省略任意的结构要素。
[0432]
产业利用性
[0433]
本发明适于分别计算目标的仰角及目标的方位角的测角装置、测角方法及车载装置。
[0434]
标号说明
[0435]
1测角装置,2波束发送部,3波束接收部,4、7信号处理器,5方位角计算部,6显示器,11局部振荡信号生成部,12码调制部,13发送切换部,14
‑
1、14
‑
2发送器,15
‑
1第1发送天线,15
‑
1a天线开口,15
‑
2第2发送天线,15
‑
2a天线开口,16
‑
1第1波束,16
‑
2第2波束,20
‑
1第1反射波,20
‑
2第2反射波,21
‑
1~21
‑
n接收天线,22
‑
1~22
‑
n接收信号,23
‑
1~23
‑
n接收器,24
‑
1~24
‑
n a/d转换器,25
‑
1~25
‑
n数字信号,31信号提取部,32仰角计算部,33傅里叶变换部,34积分部,35目标候选检测部,36仰角计算处理部,41信号提取电路,42傅里叶变换电路,43积分电路,44目标候选检测电路,45仰角计算处理电路,46方位角计算电路,51存储器,52处理器,61
‑
1第1发送天线,61
‑1‑
1、61
‑1‑
2天线元件,61
‑1‑
1a、61
‑1‑
2a天线开口,61
‑
2第2发送天线,61
‑2‑
1、61
‑2‑
2天线元件,61
‑2‑
1a、61
‑2‑
2a天线开口,62
‑
3第3波束,62
‑
4第4波束,70
‑
3第3反射波,70
‑
4第4反射波,71信号提取部,72仰角计算部,73仰角计算处理部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1