用于自动标记高精度室内定位和确定位置信息的设备和方法与流程
1.本发明一般涉及确定位置信息的领域,尤其涉及在无线局域网(wireless local area network,wlan)中自动标记高精度室内定位。为此,本发明提出了一种设备,例如服务器设备,该设备用于在训练阶段中生成包括另一设备(例如,无线设备)与接入点(access point,ap)之间的链路的信道状态信息(channel state information,csi)的数据库,并将每个csi与位置信息相关联。本发明还提出了一种设备,例如移动设备或基础设施设备,该设备在测试阶段中基于移动设备与一个或多个ap之间的链路的估计的csi来确定移动设备的位置。
背景技术:
2.通常,移动手机的室内定位为多种场景和环境(例如办公室、接待公众的建筑、智能制造、物流等)提供了一种新的位置感知服务范式。然而,这一新功能面临着两大困难。第一个困难是需要服务所要求的亚米级精度。第二个困难是基于传统卫星的定位信号不可用。
3.此外,使用专用基础设施将降低成本效益(cost-effectivenes),并且可能无法兼容大量的移动手机。这就是为什么依赖于现有的无线通信基础设施和标准是理想的解决方案。针对这种解决方案,研究了两大类室内定位方案:几何技术和指纹策略。几何方法使用一种或多种技术,例如到达时间、到达时间差、到达方向。几何技术对信道的多径分布的存在和变化非常敏感。这就是为什么几何技术在视线配置中提供最佳性能。然而,在室内环境中很少遇到这种情况。另一方面,指纹技术依赖于学习标记的无线地图,该无线地图可以包括关于移动手机所经历的信道的不同等级的细节:关于多个站点的信号强度、不同信道上的信号电平、一个或多个信道中的粗频率响应或细频率响应。
4.虽然这些技术更适应于多路径的存在,但是这些技术的实施方式需要处理以下两个主要问题:
5.1.使用另一地面真值定位系统进行数据标记:需要使用可以通过人工测量或另一精确定位系统获得的精确位置来标记训练集。这两种选择都意味着由于劳动力支出或存在替代基础设施而导致成本过大。这些额外的支出将降低指纹解决方案的成本效益。
6.2.环境改变以及需要更新标签数据集:室内无线环境下,每个位置所经历的信道容易发生不可预测的变化。由于标记数据集的过时,这些变化将降低指纹技术的性能。因此,需要定期更新该集合,以保持指纹解决方案的性能高于预定义阈值。
7.虽然指纹方案中的数据标记能够影响最终解决方案的精度和成本效益,但是却很少受到关注。传统的指纹方案对标记训练测试的准备和更新过程考虑不足。通常,可以考虑三类主要策略以处理该准备工作:
8.1.在预定义的位置集合中手动或自动训练:这是基本方案,该方案涉及在预定义的位置集合中手动测量信道度量并用相关位置标记这些信道度量。此外,最初的准备和更新都需要很高的人力成本。近年来,随着无人驾驶地面车辆(unmanned ground vehicle,
ugv)成本的下降,可以通过ugv在预定义位置进行自动扫描来完成人工训练。在训练阶段存储的测量数据可以是确定性的,也可以是概率性的。在确定性方法中,获取的数据被压缩在一个单一的表示(例如最佳测量,若干测量的平均值)中。使用概率策略时,在训练过程中存储包含收集的度量的分布的统计信息。
9.2.使用参考点和增强方案进行手动训练:在该方案中,在很少的位置上测量信道,并使用插值方法标记未测量的位置。最后,标记的无线地图包括两组点,一组是执行了实际测量的点,另一组是通过基于前一个点的插值方案获得其信息的点。
10.3.从校准模型建立虚拟无线地图:该方法基于路径损失的经验模型。该模型的参数通过拟合一组手动测量或自动测量得到。使用这些参数的模型用于生成任意分辨率的虚拟无线地图。然后使用最近点方法或其变型之一来执行定位。
11.然而,所有这些传统方案都需要事先进行手动工作或自动工作来获得标记数据集。这限制了相关解决方案的成本效益。
技术实现要素:
12.鉴于上述缺点,本发明的实施例旨在改进传统的设备和方法。目的是提供用于在wlan中精确且具有成本效益的室内定位的设备和方法。该定位基于自动创建并且高精度标记的数据集。
13.通过所附独立权利要求中提供的实施例来实现上述目的。在从属权利要求中进一步定义了实施例的有利实施方式。
14.本发明的第一方面提供了一种设备,特备是服务器设备,用于在训练阶段中:获得另一设备与至少一个接入点(ap)之间的一个或多个链路的信道状态信息(csi);基于至少一个几何定位技术估计该另一设备(特别是移动设备)的位置信息;生成包括一个或多个链路的csi的数据库,每个csi与估计的位置信息相关联。
15.第一方面的设备可以是服务器设备。该设备可以包括电路。该电路可以包括硬件和软件。硬件可以包括模拟电路和/或数字电路。在一些实施例中,该电路包括一个或多个处理器和连接到一个或多个处理器的非易失性存储器。非易失性存储器可以携带可执行程序代码,当由一个或多个处理器执行时,可执行程序代码使设备执行本文描述的操作或方法。
16.上述设备(例如,服务器设备)获得csi并且估计另一设备(例如,无线设备)的位置信息。例如,该设备可以机会性地使用依赖于到达时间、到达方向、或两者的组合的几何定位技术。例如,当精度被评估为低于预定阈值时。这种评估的目的是保证精确定位,该精确定位将用作所收集的信道状态信息的标签。
17.此外,该设备可以收集csi并且使用通过替代方法获得的位置信息对csi进行标记。此外,只要上述评估是肯定的,该设备可以继续更新标记的无线地图。此外,当不满足这些条件时,设备可以使用指纹技术(例如线性、非线性回归、最近邻等),以基于另一设备的csi定位该另一设备(例如,无线设备、移动设备)。在一些实施例中,标记的csi被馈送到以训练模式操作并遵循信息瓶颈成本函数的神经网络。
18.第一方面的设备支持基于标记数据集的wlan中的精确且具有成本效益的室内定位。
19.在第一方面的实施方式中,该设备还用于在训练阶段中基于预定义参数确定每个估计的位置信息的精度参数。
20.在第一方面的其他实施方式中,预定义参数是以下中的一个或多个:
[0021]-预定义数量的可用信道;
[0022]-另一设备与ap之间的特定链路上的高信噪比;
[0023]-另一设备包括在最佳条件下操作的替代定位传感器;
[0024]-统计置信度量。
[0025]
在第一方面的其他实施方式中,该设备还用于:在训练阶段中,如果精度参数高于阈值,则更新生成的数据库,其中,该数据库在特定时间或以预定时间间隔更新。
[0026]
在第一方面的其他实施方式中,该设备还用于在训练阶段中基于生成的数据库训练指纹技术。
[0027]
在一些实施例中,该设备(例如,服务器设备)可以提供几何定位服务,该几何定位服务可以用于例如根据来自另一设备的请求提供位置信息。此外,该设备还可以提供用于训练神经网络的标记数据集。标记数据还可以与csi集合以及位置信息一起馈送,该位置信息由移动设备中的现有服务获得,并且通过使用例如全球定位系统(global positioning system,gps)、光检测和测距(light detection and ranging,lidar)、无线检测和测距(radio detection and ranging,radar)等替代方法获得。
[0028]
在第一方面的其他实施方式中,上述指纹技术基于深度学习方法,特别是基于神经网络;上述设备还用于基于向神经网络馈送一个或多个链路的csi来训练该神经网络,一个或多个链路的csi根据数据库被标记有相关联的位置信息。
[0029]
在第一方面的其他实施方式中,上述至少一个几何定位技术基于以下中的一个或多个:
[0030]-到达方向(direction of arrival,doa)定位技术;
[0031]-到达时间差(time difference of arrival,tdoa)定位技术;
[0032]-到达时间(time of arrival,toa)定位技术。
[0033]
特别地,可以提供基于csi确定位置信息的几何定位服务。该服务可以使用一个或多个几何定位技术(例如doa、tdoa、toa)来基于csi集获得位置信息。
[0034]
在第一方面的其他实施方式中,上述替代定位传感器基于:
[0035]-gps传感器;
[0036]-室内或室外能见度传感器。
[0037]
在第一方面的其他实施方式中,上述深度学习方法基于:
[0038]-线性回归算法;或者
[0039]-非线性回归算法;或者
[0040]-最近邻算法;或者
[0041]-使用信息瓶颈原理的变分自动编码器。
[0042]
在第一方面的其他实施方式中,该设备还用于:在测试阶段中,获得与另一设备相关的一个或多个链路的csi;确定至少一个csi的质量参数;在接收到定位的请求时,基于至少一个csi和质量参数,根据该请求确定相应的位置信息。
[0043]
在第一方面的其他实施方式中,如果质量参数高于阈值,则基于使用至少一个几
何定位技术确定位置信息;或者,如果质量参数小于阈值,则基于训练后的指纹技术确定位置信息。
[0044]
在第一方面的其他实施方式中,一个或多个链路的csi基于以下确定:在预定义时间间隔期间估计用于连续数据包的信道;或者确定与所用波形的连续数据包集所经历的频率响应对应的一系列向量。
[0045]
在第一方面的其他实施方式中,至少一个csi的质量参数基于以下中的一个或多个确定:
[0046]-接收信号强度;
[0047]-所有子载波的平均信干噪比(signal to interference plus noise ratio,sinr);
[0048]-信道容量;
[0049]-具有多输入多输出(multiple input multiple output,mimo)扩展的有效指数信噪比映射(effective exponential snr mapping,eesm);
[0050]-统计置信区间。
[0051]
在第一方面的其他实施方式中,该设备还用于:在训练阶段中,并行地基于至少一个几何定位技术估计上述另一设备的位置信息并且基于训练后的指纹技术估计上述另一设备的位置信息,并且如果基于训练后的指纹技术估计的位置信息的精度参数指示比基于至少一个几何定位技术估计的位置信息的精度参数更好的精度,则更新生成的数据库。
[0052]
本发明的第二方面提供一种设备,特别是移动设备,用于在测试阶段中:从另一设备获得数据库,其中,该数据库包括一个或多个链路的csi,每个csi与估计的位置信息相关联;估计该设备与至少一个接入点(ap)之间的一个或多个链路的csi;基于一个或多个链路的估计的csi和该数据库确定位置信息。
[0053]
该设备可以是移动设备。此外,第二方面的设备可以包括电路。该电路可以包括硬件和软件。硬件可以包括模拟电路和/或数字电路。在一些实施例中,该电路包括一个或多个处理器和连接到一个或多个处理器的非易失性存储器。非易失性存储器可以携带可执行程序代码,当由一个或多个处理器执行时,可执行程序代码使设备执行本文描述的操作或方法。
[0054]
在第二方面的实施方式中,该设备还用于在测试阶段中:从上述另一设备获得训练模型,特别是训练后的指纹技术;基于训练后的指纹技术确定位置信息。
[0055]
第二方面的设备支持基于标记数据集的wlan中的精确且具有成本效益的室内定位。
[0056]
本发明的第三方面提供了一种用于设备(特别是服务器设备)的方法,该方法包括:在训练阶段中,确定另一设备与至少一个接入点(ap)之间的一个或多个链路的csi;基于至少一个几何定位技术估计该另一设备(特别是移动设备)的位置信息;生成包括一个或多个链路的csi的数据库,每个csi与估计的位置信息相关联。
[0057]
在第三方面的实施方式中,该方法还包括:在训练阶段中,基于预定义参数确定每个估计的位置信息的精度参数。
[0058]
在第三方面的其他实施方式中,预定义参数是以下中的一个或多个:
[0059]-预定义数量的可用信道;
[0060]-另一设备与ap之间的特定链路上的高信噪比;
[0061]-另一设备包括在最佳条件下操作的替代定位传感器;
[0062]-统计置信度量。
[0063]
在第三方面的其他实施方式中,该方法还包括:在训练阶段中,如果精度参数高于阈值,则更新生成的数据库,其中,该数据库在特定时间或以预定时间间隔更新。
[0064]
在第三方面的其他实施方式中,该方法还包括:在训练阶段中,基于生成的数据库训练指纹技术。
[0065]
在第三方面的其他实施方式中,上述指纹技术基于深度学习方法,特别是基于神经网络;该方法还包括基于向神经网络馈送一个或多个链路的csi来训练该神经网络,一个或多个链路的csi根据数据库被标记有相关联的位置信息。
[0066]
在第三方面的其他实施方式中,上述至少一个几何定位技术基于以下中的一个或多个:
[0067]-到达方向定位技术;
[0068]-到达时间差定位技术;
[0069]-到达时间定位技术。
[0070]
在第三方面的其他实施方式中,上述替代定位传感器基于:
[0071]-gps传感器;
[0072]-室内或室外能见度传感器。
[0073]
在第三方面的其他实施方式中,上述深度学习方法基于:
[0074]-线性回归算法;或者
[0075]-非线性回归算法;或者
[0076]-最近邻算法;或者
[0077]-使用信息瓶颈原理的变分自动编码器。
[0078]
在第三方面的其他实施方式中,该方法还包括:在测试阶段中,获得与另一设备相关的一个或多个链路的csi;确定至少一个csi的质量参数;在接收到定位的请求时,基于至少一个csi和质量参数,根据该请求确定相应的位置信息。
[0079]
在第三方面的其他实施方式中,如果质量参数高于阈值,则基于使用至少一个几何定位技术确定位置信息;或者,如果质量参数小于阈值,则基于训练后的指纹技术确定位置信息。
[0080]
在第三方面的其他实施方式中,一个或多个链路的csi基于以下确定:在预定义时间间隔期间估计用于连续数据包的信道;或者确定与所用波形的连续数据包集所经历的频率响应对应的一系列向量。
[0081]
在第三方面的其他实施方式中,至少一个csi的质量参数基于以下中的一个或多个确定:
[0082]-接收信号强度;
[0083]-所有子载波的平均信干噪比;
[0084]-信道容量;
[0085]-具有多输入多输出扩展的有效指数snr映射;
[0086]-统计置信区间。
[0087]
在第三方面的其他实施方式中,该方法还包括:在训练阶段中,并行地基于至少一个几何定位技术估计上述另一设备的位置信息并且基于训练后的指纹技术估计上述另一设备的位置信息,并且如果基于训练后的指纹技术估计的位置信息的精度参数指示比基于至少一个几何定位技术估计的位置信息的精度参数更好的精度,则更新生成的数据库。
[0088]
第三方面的方法实现了与第一方面的设备相同的优点。
[0089]
本发明的第四方面提供了一种用于设备(特别是移动设备)的方法,该方法包括:在测试阶段中,从另一设备获得数据库,其中,该数据库包括一个或多个链路的csi,每个csi与估计的位置信息相关联;估计该设备与至少一个ap之间的一个或多个链路的csi;基于一个或多个链路的估计的csi和该数据库确定位置信息。
[0090]
在第四方面的实施方式中,该方法还包括:在测试阶段中,从上述另一设备获得训练模型,特别是训练后的指纹技术;基于训练后的指纹技术确定位置信息。
[0091]
第四方面的方法实现了与第二方面的设备相同的优点。
[0092]
总之,提出了一种使用两部分的定位技术,即,基于csi的几何定位和由神经网络执行的指纹定位。指纹技术可以以两种可能的模式运行。在第一模式(即,训练模式)中,指纹技术被馈送包括与对应位置信息相关联的csi的标记数据集。此外,在第二模式(即,定位模式)中,指纹技术被馈送一组csi,并确定位置信息。
[0093]
应注意,在本技术中描述的所有设备、元件、单元、以及设备可以在软件或硬件元件或其任何种类的组合中实现。由本技术中描述的各种实体执行的所有步骤以及描述的由各种实体执行的功能旨在意味着相应的实体适于或用于执行相应的步骤和功能。即使在以下对特定实施例的描述中,将由外部实体执行的特定功能或步骤没有反映在对执行该特定步骤或功能的实体的特定详细元件的描述中,对于本领域技术人员来说应该清楚的是,这些方法和功能可以在相应的软件或硬件元件或其任何种类的组合中实现。
附图说明
[0094]
本发明的上述方面和实施方式将在下文关于附图的具体实施例的描述中阐述,在附图中:
[0095]
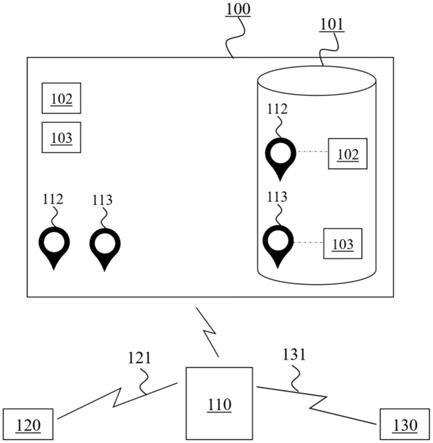
图1示意性地示出了根据本发明实施例的用于在训练阶段生成数据库的设备,特别是服务器设备。
[0096]
图2示意性地示出了根据本发明实施例的用于在测试阶段中确定位置信息的设备,特别是移动设备。
[0097]
图3是根据本发明实施例的包括无线接入网中的定位服务的移动设备的示意图。
[0098]
图4a和图4b是根据本发明实施例的在离线阶段(图4a)和在线阶段(图4b)中的处理方法的示例的示意图。
[0099]
图5是信道状态信息处理的示意图。
[0100]
图6是在训练模式下的信道状态信息处理的示意图。
[0101]
图7是根据本发明实施例的用于设备(特别是服务器设备)的方法的流程图。
[0102]
图8是根据本发明实施例的用于设备(特别是移动设备)的方法的流程图。
具体实施方式
[0103]
图1示意性地示出了根据本发明实施例的用于在训练阶段中生成数据库101的设备100(特别是服务器设备)。
[0104]
设备100可以是例如服务器设备,用于在训练阶段中获得另一设备110与至少一个ap 120、130之间的一个或多个链路121、131的csi 102、103。
[0105]
设备100还用于在训练阶段基于至少一个几何定位技术估计另一设备110(特别是移动设备)的位置信息112、113。
[0106]
设备100还用于在训练阶段中生成数据库101,该数据库101包括一个或多个链路121、131的csi 102、103,每个csi 102、103与估计的位置信息112、113相关联。
[0107]
设备100可以包括电路(图1中未示出)。该电路可以包括硬件和软件。硬件可以包括模拟电路和/或数字电路。在一些实施例中,该电路包括一个或多个处理器和连接到一个或多个处理器的非易失性存储器。非易失性存储器可以携带可执行程序代码,当由一个或多个处理器执行时,可执行程序代码使设备执行本文描述的操作或方法。
[0108]
图2示意性地示出了根据本发明实施例的用于在测试阶段中确定位置信息112、113的设备110(特别是移动设备)。
[0109]
设备110可以是例如移动设备,用于在测试阶段中从另一设备100获得数据库101,其中,数据库101包括一个或多个链路121、131的csi 102、103,每个csi 102、103与估计的位置信息112、113相关联。
[0110]
设备110还用于在测试阶段中估计设备110与至少一个接入点(ap)120、130之间的一个或多个链路121、131的csi 102、103。
[0111]
设备110还用于在测试阶段中基于一个或多个链路121、131的估计的csi 102、103和数据库101来确定位置信息112、113。
[0112]
设备110可以包括电路(图2中未示出)。该电路可以包括硬件和软件。硬件可以包括模拟电路和/或数字电路。在一些实施例中,该电路包括一个或多个处理器和连接到一个或多个处理器的非易失性存储器。非易失性存储器可以携带可执行程序代码,当由一个或多个处理器执行时,可执行程序代码使设备执行本文描述的操作或方法。
[0113]
图3示出了根据本发明实施例的包括无线接入网中的定位服务的移动设备110的示意图。在图3的实施例中,设备110连接到无线网络中的服务器设备100,服务器设备100能够提供无线数据服务。
[0114]
服务器设备100还具有可以由移动设备110访问的定位服务301和应用302。服务器设备100连接到无线接入网,并且可以分别获得移动设备110与每个接入点(ap)120、130之间的链路121、131的信道状态信息102、103。
[0115]
ap 120、130的信道状态信息102、103(例如,在图3中,第i个信道状态信息表示为csii)可以包括在预定义持续时间t内针对连续包收集的信道估计。此外,使用ofdm(a)波形,可以基于与一组连续包所经历的频率响应对应的一系列向量来获得csi。
[0116]
图4a和图4b分别示出根据本发明实施例的在离线阶段(图4a)和在线阶段(图4b)中的处理方法400a和处理方法400b的示例的示意图。
[0117]
根据图4a和图4b,该架构围绕两个阶段进行组织。在图4a中,在离线阶段期间,收集了标记的csi,以及在图4b中,在在线阶段期间,使用前述标记的数据训练指纹技术(在本
文中,例如是神经网络),基于csi推断位置信息。
[0118]
此外,当业务负载较低时,网络可以以学习模式运行。在这种情况下,通过若干信道从一个或多个移动设备收集csi,不管这些移动设备是否请求定位服务。网络可以使用有利于宽信道的资源分配策略,并且在可能的情况下触发信道跳变方案。
[0119]
参考图4a,可以例如由可以是服务器设备的设备100和/或由可以是移动设备的设备110来执行以下步骤。在不限制本公开的情况下,在下文中,基于由设备100执行来讨论方法400a,基于由设备110执行来讨论方法400b。
[0120]
在401a,设备100获得不同信道121、131的csi。
[0121]
在402a,设备100执行csi后处理,例如以确定csi的质量是否良好。此外,当确定为“否”时,设备转到步骤403a,然而,当确定为“是”时,设备转到步骤404a。
[0122]
在步骤403a,设备100确定跳频结束。
[0123]
在步骤404a,设备100执行带宽级联,并且设备100可以将结果提供给训练单元(例如,设备可以转到步骤407a)。
[0124]
在步骤405a,设备100运行到达时间技术,以确定位置信息。
[0125]
在步骤406a,设备100确定位置信息。
[0126]
在步骤407a,设备100训练指纹技术。
[0127]
在步骤408a,设备100获得训练后的模型。
[0128]
此外,可以评估与每个设备110相关的每组csi的质量。可以基于可单独或联合使用的各种度量来获得信道质量评估过程的示例,以评估csi的质量。例如,可以使用以下度量:
[0129]
·
接收信号强度(从wifi卡获得),
[0130]
·
所有子载波上的平均功率,其中n是子载波的数量,
[0131]
·
信道容量,例如,根据其中,σ2是噪声的方差,
[0132]
·
具有多输入多输出扩展的有效指数信噪比映射(eesm)。
[0133]
此外,质量良好的csi可以用于执行几何定位。
[0134]
此外,可以由设备110执行方法400b。
[0135]
在401b,设备110获得不同通信信道121、131的csi。
[0136]
在402b,设备110执行csi后处理。
[0137]
在403b,设备110使用训练后的模型。
[0138]
在404b,设备110确定位置信息。
[0139]
根据图6所示的流程图,将获得的位置信息连同csi集合一起作为训练标记数据发送到例如神经网络。此外,当网络以正常模式运行时,可以根据图5所示的流程图处理定位请求。
[0140]
图5是csi处理的示意图。
[0141]
在图5的过程500中,例如,可以通过是服务器设备的设备100和/或通过是移动设备的设备110来执行以下步骤。在不限制本公开的情况下,在下文中,基于由设备100执行来讨论过程500。
[0142]
在步骤501,设备100执行csi质量评估(确定精度参数)。此外,当确定csi的质量为
中等或较差时,设备100转到步骤502,其中,使用预先训练的神经网络推断位置。然而,当确定csi的质量为良好时,设备转到步骤503,其中,使用几何定位技术。
[0143]
此外,在步骤504,csi被馈送到训练集,用于神经网络的后续更新。
[0144]
例如,当收集的csi集质量良好时,在步骤503,定位服务使用一个或多个几何技术来定位移动设备100。当接收到定位的请求时,定位服务使用插值方案,该插值方案使用训练后的神经网络来基于移动设备110的csi集合定位移动设备110。
[0145]
图6示出了在训练模式下的csi处理的示意图。
[0146]
在图6的过程600中,例如,可以通过是服务器设备的设备100和/或通过是移动设备的设备110来执行以下步骤。在不限制本公开的情况下,在下文中,基于由设备100执行来讨论过程600。
[0147]
在步骤601,设备100确定替代方法或几何方法是否可用。此外,当确定为“是”时,设备转到步骤602,然而,当确定为“否”时,设备100转到步骤603。
[0148]
在步骤603,设备100训练模型(例如,指纹技术)。此外,训练后的模型还可以用于确定位置信息。
[0149]
在步骤603,设备100使用数据库101中的标记数据集。此外,设备100可以向待训练的模型提供标记数据集。
[0150]
图7示出了根据本发明实施例的用于设备100(特别是服务器设备)的方法700。方法700包括在训练阶段中执行以下步骤。如上所述,可以由设备100执行方法700。
[0151]
方法700包括步骤701:确定另一设备110与至少一个ap 120、130之间的一个或多个链路121、131的csi 102、103。
[0152]
方法700还包括步骤702:基于至少一个几何定位技术估计另一设备110(特别是移动设备)的位置信息112、113。
[0153]
方法700还包括步骤703:生成包括一个或多个链路121、131的csi 102、103的数据库101,每个csi 102、103与估计的位置信息112、113相关联。
[0154]
图8示出了根据本发明实施例的用于设备110(特别是移动设备)的方法800,方法800包括在测试阶段中执行以下步骤。
[0155]
如上所述,可以由设备110执行方法800。
[0156]
方法800包括步骤801:从另一设备100获得数据库101,其中,数据库101包括一个或多个链路121、131的csi 102、103,每个csi 102、103与估计的位置信息112、113相关联。
[0157]
方法800还包括步骤802:估计设备110与至少一个ap 120、130之间的一个或多个链路121、131的csi 102、103。
[0158]
方法800还包括步骤803:基于一个或多个链路121、131的估计的csi 102、103和数据库101确定位置信息112、113。
[0159]
本发明已经结合作为示例的各种实施例以及实施方式进行了描述。然而,本领域技术人员和实践所要求保护的发明的人员可以通过研究附图、本公开、以及独立权利要求来理解和进行其他变型。在权利要求和说明书中,词语“包括”不排除其他元件或步骤,不定冠词“一”或“一个”不排除多个。单个元件或其他单元可以实现权利要求中描述的若干实体或项目的功能。在相互不同的从属权利要求中描述某些措施并不表明这些措施的组合不能用于有利的实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1