状态监视装置、状态监视系统及状态监视方法与流程
1.本发明涉及状态监视装置、状态监视系统及状态监视方法,基于从对象装置检测到的声发射(以下记载为ae)波来对对象装置的状态进行监视。
背景技术:
2.以往,有基于从对象装置检测到的ae波来对对象装置的状态进行监视从而对对象装置的异常进行检测的技术。例如,专利文献1所记载的异常检测装置从由ae传感器从旋转轴承所检测到的ae信号中对一定范围的频率分量的ae信号进行辨别,对辨别出的ae信号的电平从大于阈值到小于阈值为止的持续时间进行计算,以对该ae信号的电平从大于阈值到成为极大值为止的上升时间进行计算。然后,该异常检测装置基于判定为计算出的持续时间比第一时间要长且计算出的上升时间比短于第一时间的第二时间要长的次数,来对旋转轴承的异常进行检测。现有技术文献专利文献
3.专利文献1:日本专利特开2006-226731号公报
技术实现要素:
发明所要解决的技术问题
4.例如,为了高效地进行工作机械等对象装置的维护,需要持续对对象装置的各种状态的变动进行监视,从而准确掌握对象装置处于要进行维护状态(劣化或故障)的情况。然而,专利文献1所记载的异常检测装置对满足使用从对象装置检测到的ae波的持续时间和上升时间的条件的一定的异常状态进行检测,无法对对象装置的各种状态的变动进行监视。
5.本发明解决上述问题,其目的在于获得能对对象装置的各种状态的变动进行监视的状态监视装置、状态监视系统及状态监视方法。用于解决技术问题的技术手段
6.本发明所涉及的状态监视装置包括:a/d转换部,该a/d转换部从ae传感器输入正弦波信号,将该正弦波信号转换为数字数据,所述ae传感器对根据对象装置的状态而发生变动的ae波进行检测,输出ae波的正弦波信号;数据提取部,该数据提取部从数字数据提取极值;矩阵生成部,该矩阵生成部生成矩阵数据,所述矩阵数据具有将参数的值的多个范围与极值的多个范围相对应的多个区域、并且通过在由参数计算部所计算出的参数的值的范围与由数据提取部所提取出的极值的范围相对应的区域中对该极值的发生次数进行记数而获得;以及输出处理部,该输出处理部输出由矩阵生成部所生成的矩阵数据。发明效果
7.根据本发明,生成矩阵数据并输出,所述矩阵数据具有将参数的值的多个范围与
极值的多个范围相对应的多个区域、并且通过在由参数计算部所计算出的参数的值的范围与由数据提取部所提取出的极值的范围相对应的区域中对该极值的发生次数进行记数而获得。矩阵数据中的极值的发生次数相当于发生参数的值所示的ae波的状态和与ae波的极值相对应的对象装置的状态的次数。由此,通过参照矩阵数据,从而能掌握对象装置的状态发生的次数的推移,能对对象装置的各种状态的变动进行监视。
附图说明
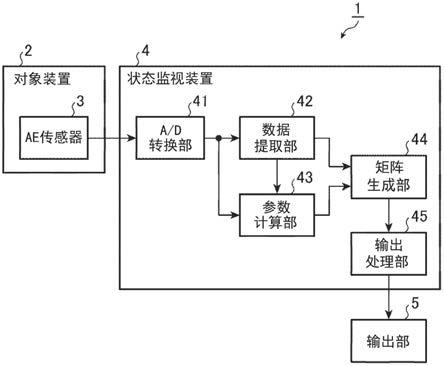
8.图1是表示实施方式1所涉及的状态监视系统的结构的框图。图2a是表示ae传感器的输出波形的例1的图,图2b是表示ae传感器的输出信号的数字数据的图。图3是表示实施方式1所涉及的状态监视方法的流程图。图4是表示ae传感器的输出波形的例2的图。图5是表示矩阵数据的示例的图。图6是表示ae传感器的输出波形的例3的图。图7是表示矩阵图像的示例的图。图8是表示实施方式1中的极大值的提取处理的示例的图。图9a是表示实现实施方式1所涉及的状态监视装置的功能的硬件结构的框图,图9b是表示执行实现实施方式1所涉及的状态监视装置的功能的软件的硬件结构的框图。
具体实施方式
9.实施方式1图1是表示实施方式1所涉及的状态监视系统1的结构的框图。状态监视系统1是基于对象装置2所发生的振动来对对象装置2的状态进行监视的系统,如图1所示,包括ae传感器3、状态监视装置4和输出部5。对象装置2例如是电动机、减速机、切削加工机、泵及涡轮等旋转机械。状态监视装置4包括a/d转换部41、数据提取部42、参数计算部43、矩阵生成部44及输出处理部45。
10.ae传感器3安装于对象装置2,对与对象装置2所发生的振动相对应的ae波进行检测。所谓ae,是在固体发生变形或破坏时积蓄于该固体内部的弹性能量作为弹性波(ae波)而被释放的现象。此外,对象装置2所发生的振动根据对象装置2的状态而发生变动,因此,可以说ae波根据对象装置2的状态而发生变动。
11.另外,ae传感器3具有输出从对象装置2检测出的ae波的正弦波信号的悬臂构造。悬臂构造是由q值较高的压电材料构成的振荡构造,例如具有多个悬臂。多个悬臂分别设定有ae波的频带所包含的谐振频率。在对象装置2是旋转机械的情况下,ae传感器3中的悬臂构造对因该旋转机械的旋转而产生的宽频带(几khz到几mhz的频率分量)的ae波中与谐振频率相对应的ae波进行检测,输出检测出的ae波的正弦波信号。
12.图2a是表示ae传感器3的输出波形的例1的图,图2b是表示ae传感器3的输出信号的数字数据的图。在图2a所示的期间a中,对象装置2所发生的振动较小,此时由ae传感器3从对象装置2检测出的ae波也较小。例如,在对象装置2为切削加工机的情况下,在安装有切削刃的主轴空转的期间,切削加工机所发生的振动较小。
13.在期间b,对象装置2所发生的振动比期间a要大,此时由ae传感器3从对象装置2检测出的ae波也成为大振幅。例如,在切削加工机中,若开始利用切削刃对被加工物进行切削,则切削刃与被加工物之间所发生的振动急剧增大,与之相对应,ae波的振幅也发生较大变化。
14.δv1是从期间b内ae波的正弦波信号的信号电平的最大值减去期间a内ae波的正弦波信号的信号电平的最大值而得的值。这意味着对象装置2从期间a的状态变为期间b的状态从而ae波的正弦波信号的信号电平最大仅变化δv1。
15.对期间b内ae传感器3的输出信号进行a/d转换而得的数字数据如图2b所示,为多个数据点的时间序列数据。在a/d转换中,一般会因从模拟信号中采样出数据点的定时的偏差而在正弦波的每个循环的波高值中产生测定误差。例如,在图2b所示的正弦波信号的每个循环的数字数据中,在极大值的数据点m1~m4中,存在最大δv2(=m4的信号电平-m3的信号电平)的测定误差。在从ae传感器3输出的ae波的正弦波信号中,ae波的信号电平的变化量δv1与波高值的测定误差δv2相比足够大。
16.状态监视装置4将由ae传感器3从对象装置2所检测到的ae波的正弦波信号进行输入,将所输入的ae波的正弦波信号转换为如图2b所示的数字数据,从ae波的正弦波信号的数字数据中提取极值(极大值或极小值)的数据点。如前所述,在从ae传感器3输出的ae波的正弦波信号中,ae波的信号电平的变化量δv1与波高值的测定误差δv2相比足够大,因此,状态监视装置4能高精度地从ae波的正弦波信号的数字数据中提取极值的数据点,而不对ae传感器3的输出波形实施包络处理。以下,只要未特别明确记载,仅将“提取极值的数据点”记载为“提取极值”。
17.状态监视装置4使用ae波的正弦波信号的数字数据,来计算表示ae波的状态的参数的值。所谓ae波的状态,是ae波的信号电平的时间性变化的状态。然后,状态监视装置4利用用ae波的正弦波信号的数字数据来计算出的参数的值、以及从ae波的正弦波信号的数字数据中所提取出的极值,来生成矩阵数据。矩阵数据是具有将参数的值的多个范围与极值的多个范围相对应的多个区域的数据,多个区域中,在用ae波的正弦波信号的数字数据来计算出的参数的值的范围与从ae波的正弦波信号的数字数据中所提取出的极值的范围相对应的区域中,对该极值的发生次数进行记数。发生极值的发生次数相当于发生参数的值所示的ae波的状态和与ae波所发生的极值相对应的对象装置的状态的次数。因此,通过参照矩阵数据,从而能掌握对象装置的状态发生的次数的推移,能对对象装置的各种状态的变动进行监视。此外,以下,对从ae波的正弦波信号的数字数据中提取极大值来作为极值的情况进行说明。另外,在提取极小值的情况下,使提取出的值的符号反转,从而能进行与极大值同样的处理。
18.输出部5以视觉或听觉的方式输出从状态监视装置4输入的信息。作为输出部5,例如为显示器等显示部或扬声器等声音输出部。状态监视装置4与输出部5之间通过有线或无线方式进行连接。从状态监视装置4输入输出部5的信息例如是表示对象装置2示出与通常状态不同的动作的情况的警报信息、由ae传感器3从对象装置2检测出的ae波的正弦波信号的数字数据、或对矩阵数据进行图像化而得的矩阵图像信息。
19.图3是表示实施方式1所涉及的状态监视方法的流程图,示出了图1所示的状态监
视装置4的一系列处理。ae传感器3对与对象装置2所发生的振动相对应的ae波进行检测。a/d转换部41输入由ae传感器3检测出的ae波的正弦波信号,将所输入的正弦波信号转换为数字数据(步骤st1)。将经a/d转换部41转换后的数字数据输出至数据提取部42和参数计算部43。
20.数据提取部42从经a/d转换部41转换后的数字数据中提取极大值(步骤st2)。例如,数据提取部42在ae波的正弦波信号的数字数据中的每个循环的极大值中对大于阈值的极大值进行判别,在判别出的极大值中,对矩阵数据中的极大值的各范围内所包含的极大值进行提取。将由数据提取部42所提取出的极大值输出至参数计算部43。此外,在从ae波的正弦波信号的数字数据中提取极小值的情况下,数据提取部42在将提取出的极小值的符号进行反转后,将其输出至参数计算部43。ae波的正弦波信号上主要重叠有向正弦波的正侧变化的噪声,因此,通过对正弦波的负侧的峰值即极小值进行提取,能减小噪声的误提取。
21.此外,用于提取极大值的上述阈值利用对象装置2处于正常状态时所获取到的ae波的正弦波信号的数字数据中的每个循环的极大值来决定。例如,将对象装置2发生经时劣化前的图2a所示的期间a内的状态视为正常状态。a/d转换部41在对象装置2处于正常状态时将由ae传感器3从对象装置2所检测出的ae波的正弦波信号转换为数字数据。数据提取部42从经a/d转换部41转换后的数字数据中提取每个循环的极大值,将提取出的极大值的平均值设定为上述阈值。
22.参数计算部43使用ae波的正弦波信号的数字数据,来计算表示ae波的状态的参数的值(步骤st3)。表示ae波的状态的参数是表示ae波的信号电平的时间性变动的状态的参数。表示ae波的状态的参数例如有上升时间、持续时间、极大值的发生间隔及期间能量。此外,除了这些以外,只要是表示ae波的信号电平的时间性变动的状态的参数即可。
23.图4是表示ae传感器3的输出波形的例2的图。图4所示的输出波形是在对象装置2的状态发生变动时由ae传感器3从对象装置2检测出的ae波的输出波形(电压波形)。例如,在旋转机械中,若向旋转中的轴施加某个冲击,则因轴的旋转而在旋转机械上所发生的振动会急剧变化,随着时间的经过而逐渐恢复到原来的状态。与该振动的变化相对应,ae波的波形也如图4所示那样发生变化。此外,图4中仅记载有ae传感器3的输出波形中的正侧。
24.上升时间tr是到在矩阵数据中的极大值的各范围内由数据提取部42提取出极大且最大的值为止的时间。在图4中,矩阵数据中的极大值的范围是大于等于电压v0小于电压v1的范围。参数计算部43对到在大于等于电压v0小于电压v1的范围内由数据提取部42提取出极大且最大的值a为止的上升时间tr进行计算。
25.例如,参数计算部43获取由数据提取部42从ae波的正弦波信号的数字数据中提取出电压v0的极大值的时刻t0、以及由数据提取部42提取出值a的时刻t1,对时刻t1减去时刻t0而得的时间间隔即tr进行计算。
26.持续时间tk是由数据提取部42持续提取矩阵数据中的极大值的各范围内的值的时间。例如,参数计算部43获取由数据提取部42从ae波的正弦波信号的数字数据中提取出电压v0的极大值的时刻t0、以及由数据提取部42提取出脱离大于等于电压v0小于电压v1的范围的小于电压v0的极大值的时刻t2,对时刻t2减去时刻t0而得的时间间隔即tk进行计算。
27.极大值的发生间隔为在矩阵数据中的极大值的各范围内由数据提取部42提取出
的极大值发生的发生间隔。例如,参数计算部43获取由数据提取部42从ae波的正弦波信号的数字数据中提取出大于等于电压v0的极大值的时刻、以及由数据提取部42接着提取出大于等于电压v0小于电压v1的范围内的极大值的时刻,对这些时刻的时间间隔即发生间隔进行计算。
28.期间能量是一定期间内的ae波的正弦波信号的波形面积。例如,参数计算部43计算持续时间tk中的ae波的正弦波信号的波形面积,来作为持续时间tk中的期间能量。
29.接着,矩阵生成部44生成对极大值的发生次数进行记数而得的矩阵数据(步骤st4)。图5是表示矩阵数据的示例的图。在图5中,矩阵数据(1)是具有将上升时间tr的多个范围与极大值的多个范围相对应而得的多个区域的数据。矩阵数据(2)是具有将持续时间tk的多个范围与极大值的多个范围相对应而得的多个区域的数据。矩阵数据(3)是具有将极大值的发生间隔ti的多个范围与极大值的多个范围相对应而得的多个区域的数据。矩阵数据(4)是具有将期间能量ve的多个范围与极大值的多个范围相对应而得的多个区域的数据。
30.矩阵数据(1)~(4)中的极大值的多个范围是由极大值的最大值所规定的最大范围(v4~)、由在对象装置2处于正常状态时所获取的极大值的平均值所规定的最小范围(v0~v1)、以及通过对最小范围与最大范围之间进行平均分割来进行规定的中间范围(v1~v2、v2~v3、v3~v4)。例如,最大范围(v4~)是在对象装置2处于正常状态时由数据提取部42所提取出的极大值所能取的最大值(电压v4)所规定的范围,是大于等于电压v4的电压范围。最小范围(v0~v1)是大于等于由ae传感器3在对象装置2处于正常状态时所检测出的ae波的正弦波信号的每个循环的极大值的平均值(电压v0)小于比电压v0要高的电压v1的电压范围。
31.中间范围(v1~v2、v2~v3、v3~v4)例如是对最小范围(v0~v1)与最大范围(v4~)之间进行平均分割而得的范围。中间范围(v1~v2)是大于等于电压v1小于比电压v1要高的电压v2的电压范围。中间范围(v2~v3)是大于等于电压v2小于比电压v3要高的电压v3的电压范围。中间范围(v3~v4)是大于等于电压v3小于比电压v3要高的电压v4的电压范围。
32.在图5中,在矩阵数据(1)中的上升时间tr的范围内,存在上升时间tr大于等于0小于tr1的时间范围(0~tr1)、上升时间tr大于等于tr1小于比tr1要长的tr2的时间范围(tr1~tr2)、上升时间tr大于等于tr2小于比tr2要长的tr3的时间范围(tr2~tr3)、上升时间tr大于等于tr3的时间范围(tr3~)。
33.例如在由参数计算部43所计算出的上升时间tr包含于时间范围(tr1~tr2)、由数据提取部42所提取出的极大值包含于中间范围(v2~v3)的情况下,矩阵生成部44在矩阵数据(1)中的范围(tr1~tr2)与中间范围(v2~v3)相对应的区域中对极大值的发生次数进行+1向上计数。在图5所示的矩阵数据(1)中,在范围(0~tr1)与最小范围(v0~v1)相对应的区域内极大值的发生次数为10。在范围(tr1~tr2)与中间范围(v1~v2)相对应的区域内极大值的发生次数为10,在范围(tr1~tr2)与中间范围(v2~v3)相对应的区域内极大值的发生次数为1000,在范围(tr1~tr2)与中间范围(v3~v4)相对应的区域内极大值的发生次数为10。在范围(tr2~tr3)与中间范围(v2~v3)相对应的区域内极大值的发生次数为10,在范围(tr2~tr3)与中间范围(v3~v4)相对应的区域内极大值的发生次数为10。另外,除上
述以外的区域内的极大值的发生次数为0。
34.另外,在矩阵数据(2)中的持续时间tk的值的范围内,存在持续时间tk大于等于0小于tk1的时间范围(0~tk1)、持续时间tk大于等于tk1小于比tk1要长的tk2的时间范围(tk1~tk2)、持续时间tk大于等于tk2小于比tk2要长的tk3的范围(tk2~tk3)、持续时间tk大于等于tk3的范围(tk3~)。
35.例如在由参数计算部43所计算出的持续时间tk包含于时间范围(tk1~tk2)、由数据提取部42所提取出的极大值包含于中间范围(v2~v3)的情况下,矩阵生成部44在矩阵数据(2)中的范围(tk1~tk2)与范围(v2~v3)相对应的区域中对极大值的发生次数进行+1向上计数。在图5所示的矩阵数据(2)中,在范围(0~tk1)与最小范围(v0~v1)相对应的区域内极大值的发生次数为10。在范围(tk1~tk2)与中间范围(v1~v2)相对应的区域内极大值的发生次数为10,在范围(tk1~tk2)与中间范围(v2~v3)相对应的区域内极大值的发生次数为1000,在范围(tk1~tk2)与中间范围(v3~v4)相对应的区域内极大值的发生次数为10。在范围(tk2~tk3)与中间范围(v2~v3)相对应的区域内极大值的发生次数为10,在范围(tk2~tk3)与中间范围(v3~v4)相对应的区域内极大值的发生次数为10。另外,除上述以外的区域内的极大值的发生次数为0。
36.在矩阵数据(3)中的极大值的发生间隔ti的范围内,存在发生间隔ti大于等于0小于ti1的时间范围(0~ti1)、发生间隔ti大于等于ti1小于比ti1要长的ti2的时间范围(ti1~ti2)、发生间隔ti大于等于ti2小于比ti2要长的ti3的时间范围(ti2~ti3)、发生间隔ti大于等于ti3的时间范围(ti3~)。
37.例如在由参数计算部43所计算出的发生间隔ti包含于时间范围(ti1~ti2)、由数据提取部42所提取出的极大值包含于中间范围(v2~v3)的情况下,矩阵生成部44在矩阵数据(3)中的范围(ti1~ti2)与中间范围(v2~v3)相对应的区域中对极大值的发生次数进行+1向上计数。在图5所示的矩阵数据(3)中,在范围(0~ti1)与最小范围(v0~v1)相对应的区域内极大值的发生次数为10。在范围(ti1~ti2)与中间范围(v1~v2)相对应的区域内极大值的发生次数为10,在范围(ti1~ti2)与中间范围(v2~v3)相对应的区域内极大值的发生次数为1000,在范围(ti1~ti2)与中间范围(v3~v4)相对应的区域内极大值的发生次数为10。在范围(ti2~ti3)与中间范围(v2~v3)相对应的区域内极大值的发生次数为10,在范围(ti2~ti3)与中间范围(v3~v4)相对应的区域内极大值的发生次数为10。除上述以外的区域内的极大值的发生次数为0。
38.在矩阵数据(4)中的期间能量ve的值的范围内,存在期间能量ve大于等于ve0小于比ve0要高的ve1的范围(ve0~ve1)、期间能量ve大于等于ve1小于比ve1要高的ve2的范围(ve1~ve2)、期间能量ve大于等于ve2小于比ve2要高的ve3的范围(ve2~ve3)、期间能量ve大于等于ve3的范围(ve3~)。
39.例如在由参数计算部43所计算出的期间能量ve包含于范围(ve1~ve2)、由数据提取部42所提取出的极大值包含于中间范围(v2~v3)的情况下,矩阵生成部44在矩阵数据(4)中的范围(ve1~ve2)与中间范围(v2~v3)相对应的区域中对极大值的发生次数进行+1向上计数。在图5所示的矩阵数据(4)中,在范围(ve0~ve1)与最小范围(v0~v1)相对应的区域内极大值的发生次数为10。在范围(ve1~ve2)与中间范围(v1~v2)相对应的区域内极大值的发生次数为10,在范围(ve1~ve2)与中间范围(v2~v3)相对应的区域内极大值的发
生次数为1000,在范围(ve1~ve2)与中间范围(v3~v4)相对应的区域内极大值的发生次数为10。在范围(ve2~ve3)与中间范围(v2~v3)相对应的区域内极大值的发生次数为10,在范围(ve2~ve3)与中间范围(v3~v4)相对应的区域内极大值的发生次数为10。另外,除上述以外的区域内的极大值的发生次数为0。
40.矩阵生成部44在每次由ae传感器3对对象装置2所发生的ae波进行检测时,都反复进行上述矩阵数据的生成。由此,在矩阵数据中,对与对象装置2的正常状态相对应的极大值的发生次数进行向上计数。例如,在矩阵数据(1)中的范围(tr1~tr2)与范围(v2~v3)相对应的区域内,对极大值的发生次数进行1000次记数,范围(tr1~tr2)与范围(v2~v3)相对应的对象装置2的状态推测为是该对象装置2的正常状态(通常的动作状态)。
41.接着,输出处理部45将由矩阵生成部44所生成的矩阵数据输出至输出部5(步骤st5)。例如,输出处理部45在矩阵数据中在未对极大值的发生次数进行记数的区域内对极大值的发生次数进行了记数的情况下,将警报信息输出至输出部5。
42.在矩阵数据(1)中,未对极大值的发生次数进行记数的区域例如是范围(tr1~tr2)与范围(v4~)相对应的区域。如上所述,在矩阵数据(1)中,与对象装置2的正常状态相对应的区域是对极大值的发生次数进行了1000次记数的、范围(tr1~tr2)与范围(v2~v3)相对应的区域。推测为与对象装置2的正常状态相对应的区域以外且未对极大值的发生次数进行记数的区域与对象装置2中所突然发生的状态(例如对象装置2中所突然发生的故障)相对应。
43.在矩阵数据中在与对象装置2中所突然发生的状态相对应的区域内对极大值的发生次数进行了记数,在这种情况下,输出处理部45将警报信息输出至输出部5。输出部5以视觉或听觉的方式输出从输出处理部45输入的警报信息。维护作业者能基于从输出部5输出的警报信息,来进行与对象装置2中所突然发生的状态相关的维护。
44.另外,在由矩阵生成部44在对象装置2处于正常状态时所生成的矩阵数据中极大值的发生次数少于一定次数的区域内对极大值的发生次数进行记数,在这种情况下,输出处理部45将警报信息输出至输出部5。若对象装置2中的经时劣化加剧,则在矩阵数据中的与对象装置2的正常状态相对应的区域中,在极大值的发生次数较少的区域内,对极大值的发生次数进行向上计数。
45.例如,在矩阵数据(1)中,范围(tr1~tr2)与范围(v3~v4)相对应的区域(极大值的发生次数=10次)与范围(tr1~tr2)与范围(v2~v3)相对应的区域(极大值的发生次数=1000次)相比,被向上计数的极大值的发生次数较少,推测为与对象装置2发生动作偏差时的状态相对应。若对象装置2中的经时劣化加剧,则像这样的与通常动作的偏差频繁发生。因此,在矩阵数据(1)中的范围(tr1~tr2)与范围(v3~v4)相对应的区域内对极大值的发生次数进行向上记数,在这种情况下,输出处理部45将警报信息输出至输出部5。输出部5以视觉或听觉的方式输出从输出处理部45输入的警报信息。维护作业者能基于从输出部5输出的警报信息来对对象装置2的经时劣化进行维护。
46.另外,输出处理部45能将对矩阵数据进行图像化而得的矩阵图像信息输出至输出部5。图6是表示ae传感器3的输出波形的例3的图,示出了对象装置2为切削加工机的情况。图6所示的期间s1是切削加工机开始对被加工物进行切削前的期间,不使切削刃与被加工物相接触,安装有切削刃的主轴进行空转。此时,切削加工机发生由该主轴的旋转所引起的
振动。
47.期间s2是使切削刃与被加工物相接触而开始对被加工物进行切削的加工开始期间。在期间s2中,当切削刃与被加工物相接触时会在切削刃与被加工物之间急剧地产生较大振动,因此,ae波也与该振动相对应地发生较大变动。期间s3是对被加工物进行切削的加工期间。在期间s3中,切削加工机因切削刃对被加工物的切削而发生振动。
48.期间s4是结束对被加工物的切削的期间。在期间s4中,将切削刃从被加工物分离从而切削刃被向被加工物按压,由此产生的反作用会导致两者发生摇动,会在切削刃与被加工物之间产生较大的振动。与该振动相对应,ae波也会较大变动。
49.例如,在期间s1中,数据提取部42提取大于等于电压v0小于电压v1范围内的极大值。参数计算部43对由数据提取部42持续提取大于等于电压v0小于电压v1范围内的极大值的持续时间进行计算。
50.在期间s2中,数据提取部42提取大于等于电压v3小于电压v4范围内的极大值。参数计算部43对由数据提取部42持续提取大于等于电压v3小于电压v4范围内的极大值的持续时间进行计算。此外,在期间s2中,ae传感器3的输出电压因切削刃与被加工物之间所发生的较大的振动而大幅变化至电压v4附近,因此,由数据提取部42依次提取出的极大值大于等于电压v3小于电压v4的范围内的值的持续时间较长。
51.在期间s3中,数据提取部42提取大于等于电压v2小于电压v3范围内的极大值。参数计算部43对由数据提取部42持续提取大于等于电压v2小于电压v3范围内的极大值的持续时间进行计算。此外,在期间s3中,ae传感器3的输出电压在电压v2附近推移,因此,由数据提取部42依次提取出的极大值大于等于电压v2的持续时间较短。
52.在期间s4中,与期间s3相同,数据提取部42提取大于等于电压v2小于电压v3范围内的极大值。参数计算部43对由数据提取部42持续提取大于等于电压v2小于电压v3范围内的极大值的持续时间进行计算。此外,在期间s4中,ae传感器3的输出电压因切削刃与被加工物之间所发生的较大的振动而大幅变化至电压v3附近,因此,由数据提取部42依次提取出的极大值大于等于电压v2小于电压v3范围内的值的持续时间较长。
53.矩阵生成部44生成在由参数计算部43所计算出的持续时间的范围与由数据提取部42所提取出的极大值的范围相对应的区域内对该极大值的发生次数进行向上计数而得的矩阵数据。切削加工机反复执行从期间s1到期间s4为止的动作,从而在矩阵数据中对与各期间的状态相对应的极大值的发生次数进行向上计数。由此,通过对由矩阵生成部44所生成的矩阵数据进行图像化来获得图7所示的矩阵图像。
54.在图7所示的矩阵图像中,在横轴为持续时间且纵轴为极大值的二维平面上,显示有与切削加工机的从期间s1到期间s4的各个状态相对应的极大值的发生次数的分布a1~a4。分布a1是与图6所示的期间s1中的切削加工机的状态相对应的极大值的发生次数的分布,分布a2是与期间s2中的切削加工机的状态相对应的极大值的发生次数的分布。分布a3是与期间s3中的切削加工机的状态相对应的极大值的发生次数的分布,分布a4是与期间s4中的切削加工机的状态相对应的极大值的发生次数的分布。
55.例如,输出处理部45通过对从矩阵生成部44输出的矩阵数据进行图像化,来生成图7所示的矩阵图像信息,将矩阵图像信息输出至输出部5。输出部5将矩阵图像信息显示于画面上。在图7所示的矩阵图像信息中,白色方块表示极大值的发生次数为0,意味着与之相
对应的对象装置2的状态未发生。随着方块的颜色变深,极大值的发生次数增加。极大值的发生次数增加意味着与极大值的发生相对应的对象装置2的状态发生的频度增多。因此,通过参照矩阵图像信息,能对对象装置2的各种状态进行监视。
56.由切削加工机反复执行期间s1到期间s4的动作,若切削加工机发生经时劣化,则与持续时间和极大值相对应的切削加工机的状态逐渐发生变化。此时,图7所示的矩阵图像信息中的分布a1~a4在由持续时间和极大值所规定的二维平面上向极大值的轴向或持续时间的轴向进行移动。
57.例如,专利文献1所记载的异常检测装置仅对由ae信号的持续时间和上升时间所规定的符合一定条件的对象装置的状态进行监视。与之相对,在实施方式1所涉及的状态监视装置4中,参照矩阵图像信息,能掌握对象装置2的状态发生的次数的推移,能对对象装置2的各种状态的变动进行监视。例如,维护作业者通过对图7所示的矩阵图像信息中的分布a1~a4的移动进行视觉识别,从而能对切削加工机中的经时劣化的加剧程度进行识别。此外,虽然用图7示出了参数为持续时间的矩阵图像信息,但参数为上升时间、极大值的发生间隔和期间能量中的任意一个均能生成矩阵图像信息。在生成与多个参数分别相对应的矩阵图像信息的情况下,在各矩阵图像信息的二维平面上,只要调整横轴方向的参数的值的范围,使得极大值的发生次数的分布被显示于基本相同的位置即可。由此,维护作业者容易对极大值的发生次数、即对象装置2的状态的发生次数的分布进行视觉识别。
58.接着,对数据提取部42所进行的极大值的提取处理的变形例进行说明。图8是表示实施方式1中的极大值的提取处理的示例的图。数据提取部42从最上位的值到与电压v0相等为止依次提取ae波的正弦波信号的数字数据中的多个循环的极大值。由此,例如如图8所示,提取从1020到875(=电压v0)为止的26个极大值。
59.接着,数据提取部42将从ae波的正弦波信号的数字数据依次提取出的极大值依次分类为以将该极大值的最下位的位数进行四舍五入而得的值为代表值的第一组。从组(1)到组(6)为第一组。例如,在组g(1)中,将极大值1020、1016和1015的最下位的位数进行四舍五入而得的值均为代表值1020。在组g(2)中,将极大值的最下位的位数进行四舍五入而得的值均为代表值1010,在组g(3)中,将极大值的最下位的位数进行四舍五入而得的值均为代表值1000。在组g(4)中,将极大值的最下位的位数进行四舍五入而得的值均为代表值900,在组g(5)中,将极大值的最下位的位数进行四舍五入而得的值均为代表值890,在组g(6)中,将极大值的最下位的位数进行四舍五入而得的值均为代表值880。
60.接着,数据提取部42以最近上位的代表值与最近下位的代表值之差大于判定值的所述第一组间为边界,将分类而得的组g(1)至组g(6)进一步分类为多个第二组。组g(a)和组g(b)为第二组。在图8中,组g(1)和组g(2)、组g(2)和组g(3)、组g(4)和组g(5)、以及组g(5)和组g(6)各自的代表值之差为10。另外,组g(3)与组g(4)的代表值之差为100。例如,在上述判定值为20的情况下,组g(3)与组g(4)的代表值之差(=100)比判定值即20要大。因此,数据提取部42以组g(3)与组g(4)之间为边界,分类为包含组g(1)至组g(3)的组g(a)、以及包含组g(4)至组g(6)的组g(b)。
61.接着,数据提取部42从第二组所包含的第一组中、代表值位于最近上位的第一组与代表值位于最近下位的第一组之间极大值的发生次数的增减倾向发生反转的第一组中,提取极大值,例如,在图8所示的组g(a)中,组g(1)中的极大值的发生次数为3,组g(2)中的
极大值的发生次数为6,组g(3)中的极大值的发生次数为3,因此,在组g(2)中极大值的发生次数的增减倾向发生反转。
62.数据提取部42从极大值的发生次数的增减倾向发生反转的组g(2)中提取极大值。同样,在组g(b)中,数据提取部42从极大值的发生次数的增减倾向发生反转的组g(5)中提取极大值。矩阵生成部44生成矩阵数据,所述矩阵数据通过对由数据提取部42从第二组中所提取出的极大值的发生次数进行记数而得。即使如此,也能生成可掌握对象装置2的状态发生的次数的推移的矩阵数据。
63.另外,数据提取部42能基于第一组所包含的极大值中、当对最下位的位数进行四舍五入时成为第二组间的边界值的极大值,对每个第二组提取极大值。例如,在组g(a)中,组g(1)的代表值为1020,与设定有1025以上的极大值发生的次数的第一组(若对极大值的最下位的位数进行四舍五入,则代表值为1030)之间的边界值为1025。组g(3)的代表值为1000,与设定有小于995的极大值发生的次数的第一组(若对极大值的最下位的位数进行四舍五入,则代表值为990)之间的边界值为994。
64.在组g(b)中,组g(4)的代表值为900,与设定有905以上的极大值发生的次数的第一组(若对极大值的最下位的位数进行四舍五入,则代表值为910)之间的边界值为905。组g(6)的代表值为880,与设定有小于875的极大值发生的次数的第一组(若对极大值的最下位的位数进行四舍五入,则代表值为870)之间的边界值为874。数据提取部42对电压v0设定边界值994,基于电压v0,从组g(a)中提取极大值。另外,数据提取部42对电压v0设定边界值874,基于电压v0,从组g(b)中提取极大值。
65.另外,数据提取部42能基于包含于第二组的极大值的平均值的标准偏差σ,对每个第二组提取极大值。例如,数据提取部42对包含于组g(a)的极大值的平均值进行计算,进而对平均值的标准偏差σ进行计算。然后,数据提取部42将组g(a)中的极大值的分布中与
±
6σ或
±
3σ相对应的极大值设定为阈值,基于该阈值从组g(a)中提取极大值。例如从组g(b)中提取大于阈值的极大值。在组g(b)中也同样,数据提取部42将组g(b)中的极大值的分布中与
±
6σ或
±
3σ相对应的极大值设定为阈值,基于该阈值从组g(b)中提取极大值。
66.接着,对实现实施方式1所涉及的状态监视装置4的功能的硬件结构进行说明。利用处理电路来实现状态监视装置4中的a/d转换部41、数据提取部42、参数计算部43、矩阵生成部44及输出处理部45的各功能。即,状态监视装置4具备处理电路,该处理电路执行图3的步骤st1至步骤st5的处理。处理电路可以是专用的硬件,也可以是执行存储器中所存储的程序的cpu(central processing unit:中央处理单元)。
67.图9a是表示实现状态监视装置4的功能的硬件结构的框图,图9b是表示执行实现状态监视装置4的功能的软件的硬件结构的框图。在图9a和图9b中,输入接口100对从ae传感器3输出至状态监视装置4的正弦波信号进行中继。输出接口101对从状态监视装置4输出至输出部5的数据进行中继。此外,输出接口101也可以是通过无线通信来向输出部5发送数据的通信接口。
68.在处理电路是图9a所示的专用硬件的处理电路102的情况下,处理电路102例如相当于单一电路、复合电路、程序化处理器、并列程序化处理器、asic(application specific integrated circuit:专用集成电路)、fpga(field-programmable gate array:现场可编程门阵列)或它们的组合。状态监视装置4中的a/d转换部41、数据提取部42、参数计算部43、
矩阵生成部44及输出处理部45的功能可由各个处理电路来分开实现,也可将这些功能进行汇总而由一个处理电路来实现。
69.在处理电路是图9b所示的处理器103的情况下,状态监视装置4中的a/d转换部41、数据提取部42、参数计算部43、矩阵生成部44及输出处理部45的功能由软件、固件、或软件与固件的组合来实现。另外,软件或固件以程序的形式来表述,并存储于存储器104。
70.处理器103读取并执行存储于存储器104的程序,从而实现状态监视装置4中的a/d转换部41、数据提取部42、参数计算部43、矩阵生成部44及输出处理部45的功能。例如,状态监视装置4具备存储器104,该存储器104用于存储在由处理器103执行时最终执行图3所示的流程图中的步骤st1至步骤st5的处理的程序。这些程序使计算机执行a/d转换部41、数据提取部42、参数计算部43、矩阵生成部44及输出处理部45的步骤或方法。存储器104也可以是存储有用于使计算机作为a/d转换部41、数据提取部42、参数计算部43、矩阵生成部44及输出处理部45而发挥功能的程序的计算机可读取存储介质。
71.存储器104例如相当于ram(randomaccessmemory:随机存取存储器)、rom(readonlymemory:只读存储器)、闪存、eprom(erasableprogrammablereadonlymemory:可擦可编程只读存储器)、eeprom(electrically-eprom:电可擦可编程只读存储器)等非易失性或易失性的半导体存储器、以及磁盘、软盘、光盘、压缩光盘、迷你光盘或dvd等。
72.状态监视装置4中的a/d转换部41、数据提取部42、参数计算部43、矩阵生成部44及输出处理部45的功能的一部分可由专用硬件来实现,一部分可由软件或固件来实现。例如,a/d转换部41利用专用的硬件即处理电路102来实现功能,数据提取部42、参数计算部43、矩阵生成部44及输出处理部45通过由处理器103读取并执行存储于存储器104的程序来实现功能。由此,处理电路能利用硬件、软件、固件或它们的组合来实现上述功能。
73.如上所述,实施方式1所涉及的状态监视装置4生成并输出与表示ae波的状态的参数的值相对应的、设定有从ae波的正弦波信号的数字数据中提取出的极大值的数据点发生的次数的矩阵数据。极大值的数据点发生的次数是与上述参数的值和极大值的数据点相对应的对象装置的状态发生的次数。由此,通过参照矩阵数据,从而能掌握对象装置的状态发生的次数的推移,能对对象装置的各种状态的变动进行监视。
74.此外,本发明并不局限于上述实施方式,在本发明的范围内,可以对实施方式的任意结构要素进行变形或省略实施方式的任意结构要素。工业上的实用性
75.本发明所涉及的状态监视装置例如可用于旋转机械的状态监视。标号说明
76.1状态监视系统,2对象装置,3ae传感器,4状态监视装置,5输出部,41a/d转换部,42数据提取部,43参数计算部,
44矩阵生成部,45输出处理部,100输入接口,101输出接口,102处理电路,103处理器,104存储器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1