环境地图创建装置及其方法以及自身位置推测装置、自主移动体与流程
1.本发明涉及一种创建用于推测本机(自身)的位置的自身位置推测用的环境地图的环境地图创建装置及其环境地图创建方法以及用于推测自身的位置(自身位置)的自身位置推测装置、具备该自身位置推测装置的自主移动体。
背景技术:
2.例如,自主移动机器人等的根据自身(本机)的判断进行移动的自主移动体已被应用在各种各样的用途。自主移动体被应用在例如在工厂和楼房等设施的物流、清扫以及保安等的用途,并且还被应用在例如危险的环境、海底以及行星等人类难以直接前往的环境的作业等的用途。这样的自主移动体,因为根据自身的判断进行移动,需要识别自身位置,用于推测自身位置的自身位置推测技术正处于研究、开发中(例如,参照专利文献1等)。
3.关于该自身位置推测技术已知有,例如,通过基于本机所具备的左右两个轮子的转速求出移动方向以及移动距离来推测自身位置的技术(测距法(odometry method));搜索被设置在空间的标记(marker)或在空间内的所谓的地标(landmark),通过基于该搜索到的标记或地标的三角测量来推测自身位置的技术;通过识别在自主移动时测量得到的地图(周边地图、局部地图)位于预先测量得到的或者预先准备的地图(环境地图、全局地图)的何处,来推测自身位置的技术等。
4.在利用该环境地图的自身位置推测技术,需要将周边地图和环境地图进行匹配,该匹配方法有,例如,利用扫描匹配(icp(itetative closest point)、scan matching或ndt(normal distribution transform)、scan matching或polar scan matching等)的方法(扫描匹配法);利用粒子滤波的方法(粒子滤波法(particle filter method)、蒙特卡罗法(monte carlo method))或利用这两种方法的方法等。扫描匹配方法,例如,icp法,在周边地图的数据组和环境地图的数据组这两个点组之间,在最接近点等处求出对应点,通过重复进行收束运算将对应点之间的距离的平方和成为最小的位置作为自身位置而求出。上述粒子滤波法,针对多个n个粒子的每个粒子,根据在周边地图上的物体和在环境地图上的物体的重叠程度求出似然度(likelihood degree),将似然度为最高的粒子作为自身位置进行推测。
5.然而,利用这样的环境地图进行自身位置推测的技术,如果上述环境地图所表示的环境与推测自身位置时的实际(现实)环境不同时,就有可能会错误地推测自身位置。特别是在工厂内,因为根据制造工序或制造品种等例如会对制造装置拆装附件、拆装零部件台、使作业台(作业设备)接近或分离等,上述环境地图所表示的环境与推测自身位置时的实际(现实)环境相互不同的情况较多,这一点很重要。
6.现有技术文献
7.专利文献
8.专利文献1:日本专利公开公报特开2013-73250号
技术实现要素:
9.本发明是鉴于上述的情况而做出的发明,其目的在于提供一种创建能够正确地推测自身位置的自身位置推测用的环境地图的环境地图创建装置及其环境地图创建方法以及利用这样的自身位置推测用的环境地图的自身位置推测装置、具备该自身位置推测装置的自主移动体。
10.本发明涉及的环境地图创建装置以及环境地图创建装置,基于在第一环境作为环境地图而创建的第一子环境地图以及在包含所述第一环境但不同于所述第一环境的第二环境作为环境地图而创建的第二子环境地图,创建自身位置推测用的环境地图。本发明涉及的自身位置推测装置,利用基于在所述第一环境的所述第一子环境地图以及在所述第二环境的所述第二子环境地图的自身位置推测用的环境地图,推测自身位置。而且,本发明涉及的自主移动体具备所述的自身位置推测装置,自主地进行移动。
附图说明
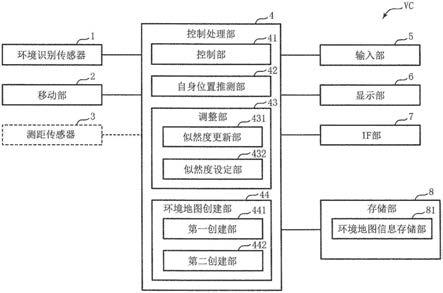
11.图1是表示具备了实施方式涉及的环境地图创建装置以及自身位置推测装置的实施方式涉及的自主移动体的构成的方框图。
12.图2是表示在上述自主移动体、有关创建自身位置推测用的环境地图的动作的流程图。
13.图3是用于说明作为一个例子的第一环境以及在上述第一环境的第一子环境地图的示意图。
14.图4是用于说明作为一个例子的第二环境以及在上述第二环境的第二子环境地图的示意图。
15.图5是用于说明在创建上述自身位置推测用的环境地图时、使上述第一子环境地图和上述第二子环境地图相互重叠的方法的示意图。
16.图6是用于说明作为一个例子的上述自身位置推测用的环境地图的示意图。
17.图7是表示在上述自主移动体、有关推测自身位置的动作的流程图。
18.图8是用于说明在上述自主移动体、有关自身位置推测的第一实施方式的作用效果的示意图。
19.图9是用于说明在上述自主移动体、有关自身位置推测的第二实施方式的作用效果的示意图。
具体实施方式
20.以下,基于附图对本发明涉及的一实施方式进行说明。然而,本发明的技术保护范围并不局限于所公开的实施方式。另外,在各附图中赋予了相同符号的构成为相同的构成,适当地省略其说明。另外,在说明书中,在统称的情况下,用省略了上下标的参照符号来表示,在特指各自的构成的情况下,用赋予了上下标的参照符号来表示。
21.实施方式涉及的环境地图创建装置是用于创建自身位置推测用的环境地图的装置。该环境地图创建装置具备:环境识别传感器,用于测量物体的方向和到所述物体为止的距离;第一创建部,基于用所述环境识别传感器在第一环境测量到的第一测量结果创建环境地图作为第一子环境地图,基于用所述环境识别传感器在包含所述第一环境但不同于所
述第一环境的第二环境测量到的第二测量结果创建环境地图作为第二子环境地图;以及,第二创建部,基于用所述第一创建部创建的第一以及第二子环境地图,创建所述自身位置推测用的环境地图。实施方式涉及的自身位置推测装置具备:环境地图信息存储部,用于存储自身位置推测用的环境地图;环境识别传感器,用于测量物体的方向和到所述物体为止的距离;以及,自身位置推测部,基于用所述环境识别传感器测量到的测量结果以及存储在所述环境地图信息存储部中的所述自身位置推测用的环境地图,推测自身位置,其中,所述自身位置推测用的环境地图是基于在规定的第一环境的环境地图以及包含所述第一环境但不同于所述第一环境的规定的第二环境的环境地图的环境地图。这样的所述自身位置推测用的环境地图,例如,由上述环境地图创建装置创建,被存储在自身位置推测装置的环境地图信息存储部。而且,实施方式涉及的自主移动体具备:所述的自身位置推测装置;移动部,使本机移动;以及,自主移动控制部,基于用所述自身位置推测装置推测出的自身位置控制所述移动部。以下,结合这样的环境地图创建装置以及自身位置推测装置,对自主移动体进行更具体的说明。
22.图1是表示具备实施方式涉及的环境地图创建装置以及自身位置推测装置的实施方式涉及的自主移动体的构成的方框图。
23.实施方式中的自主移动体vc,例如,如图1所示,具备环境识别传感器1、移动部2、控制处理部4、输入部5、显示部6、接口部(if部)7、存储部8。
24.环境识别传感器1是与控制处理部4连接、按照控制处理部4的控制测量存在于规定的空间(区域)的物体的方向和到所述物体为止的距离的传感器。环境识别传感器1即可以二维地测量物体,也可以三维地测量物体。环境识别传感器1具备例如利用了电磁波或超声波的雷达、利用了脉冲激光的lidar(light detection and ranging,laser imaging detection and ranging)、利用了可见光或红外光的立体相机等。
25.移动体2(应为移动部2)是与控制处理部4连接、按照控制处理部4的控制使本机vc移动的装置。移动体2(应为移动部2)具备例如左右一对驱动轮、与控制处理部4连接并按照控制处理部4的控制产生驱动力的马达、将在所述马达产生的驱动力传送到所述驱动轮的减速器等。另外,移动体2(应为移动部2),除了上述左右一对驱动轮之外,为了防止翻倒并使自主移动体vc以相对稳定的姿势移动,还可以具备一个或多个辅助轮(从动轮)或滑动地抵接于地板的一个或多个辅助棒等,以便能以至少三点与地板(路面)接触。
26.输入部5是与控制处理部4连接、将各种指令或各种数据输入到自主移动体vc(环境地图创建装置、自身位置推测装置)的装置,例如,是被分配了规定的功能的多个输入开关等。上述各种指令是例如指示开始创建自身位置推测用的环境地图的指令、指示开始自主移动的指令等。上述各种数据是例如所创建的自身位置推测用的环境地图的识别符(自主移动的空间的名称)等、为了进行上述环境地图的创建和自主移动所需的数据。显示部6是与控制处理部4连接、按照控制处理部4的控制显示从输入部5输入的指令或数据以及本机vc在上述环境地图的创建中或自主移动中的动作状态等的装置,例如是crt显示器、液晶显示器(lcd)以及有机el显示器等的显示装置。
27.另外,触控面板也可以用输入部5以及显示部6来构成。在构成该触控面板的情况下,输入部5例如是电阻膜方式或电容方式(resistive type or capacitive type)等的用于检测操作位置并进行输入的位置输入装置。在该触控面板,位置输入装置被设置在显示
装置的显示面上,显示可输入到显示装置的一个或多个输入内容的候选,如果用户触碰显示了想要输入的输入内容的显示位置,通过位置输入装置就能检测出该位置,并将被显示在所检测到的位置的显示内容作为用户的操作输入内容输入到自主移动体vc。这样的触控面板,因为用户容易直观地理解输入操作,所以提供了对于用户而言便于操作的自主移动体vc。
28.if部7是与控制处理部4连接、按照控制处理部4的控制进行与外部设备之间的数据的输入输出的电路,例如是作为串行通信方式的rs-232c的接口电路、利用了蓝牙(注册商标)标准的接口电路、进行irda(infrared data association)标准等的红外线通信的接口电路以及利用了usb(universal serial bus)标准的接口电路等。另外,if部7也可以是进行与外部设备之间的通信的电路,例如数据通信卡、遵照ieee 802.11标准等的通信接口电路等。
29.存储部8是与控制处理部4连接、按照控制处理部4的控制存储各种规定的程序以及各种规定的数据的电路。所述各种规定的程序例如包含控制处理程序等。所述控制处理程序包含控制程序、自身位置推测程序、调整程序以及环境地图创建程序。所述控制程序是根据自主移动体vc的各个部1、2、5至8的功能分别控制所述各个部的程序。所述环境地图创建程序是基于作为第一子环境地图而创建的环境地图以及作为第二子环境地图而创建的环境地图,创建上述自身位置推测用的环境地图的程序,所述第一子环境地图基于在第一环境下由环境识别传感器1测量到的第一测量结果而创建,所述第二子环境地图基于在包含上述第一环境但不同于上述第一环境的第二环境下由环境识别传感器1测量到的第二测量结果而创建。所述自身位置推测程序是基于由环境识别传感器1测量到的第三测量结果以及存储在存储部8的自身位置推测用的环境地图,推测自身位置的程序。所述调整程序是基于由环境识别传感器1测量到的上述第三测量结果以及存储在存储部8的自身位置推测用的环境地图,更新上述自身位置推测用的环境地图并将其存储到存储部8的程序。所述各种规定的数据包含为了执行各程序所需的数据等,例如物体存在似然度lh的调整值(加权值)γ(0<γ≦1)、增幅值α(0<α<1-γ)以及减幅值β(0<β<γ)或自身位置推测用的环境地图等。存储部8功能性地具备存储该自身位置推测用的环境地图的环境地图信息存储部81。所述自身位置推测用的环境地图将在以后进一步进行说明。这样的存储部8具备例如作为非易失性存储元件的rom(read only memory)、作为可改写的非易失性存储元件的eeprom(electrically erasable programble read only memory)等。存储部8包含用于存储在执行上述规定的程序中产生的数据等的被称为控制处理部4的工作存储器的ram(random access memory)等。另外,存储部8也可以具备具有比较大的存储容量的硬盘装置。
30.控制处理部4是根据自主移动体vc的各个部1、2、5至8的功能分别控制自主移动体vc的各个部,基于环境识别传感器1的测量结果创建自身位置推测用的环境地图,基于环境识别传感器1的测量结果自主地进行移动的电路。控制处理部4具备例如cpu(central processing unit)以及其外围电路。控制处理部4,通过执行上述控制处理程序,功能性地具备控制部41、自身位置推测部42、调整部43以及环境地图创建部44。
31.控制部41是根据自主移动体vc的各个部1、2、5至8的功能分别控制各个部负责自主移动体vc的整体控制的部分。在本实施方式,控制部41,在自主移动时,基于由自身位置
推测部42推测出的自身位置控制移动部2。
32.环境地图创建部44基于作为第一子环境地图而创建的环境地图以及作为第二子环境地图而创建的环境地图,创建上述自身位置推测用的环境地图,所述第一子环境地图基于在第一环境下由环境识别传感器1测量到的第一测量结果而创建,所述第二子环境地图基于在包含上述第一环境但不同于上述第一环境的第二环境下由环境识别传感器1测量到的第二测量结果而创建。环境地图创建部44功能性地具备第一创建部441以及第二创建部442。
33.第一创建部441,基于在规定的第一环境下由环境识别传感器测量到的第一测量结果创建环境地图作为第一子环境地图,基于在包含上述第一环境但不同于上述第一环境的规定的第二环境下由环境识别传感器1测量到的第二测量结果创建环境地图作为第二子环境地图。
34.第二创建部442,基于由第一创建部441创建的第一以及第二子环境地图,创建自身位置推测用的环境地图。进一步具体而言,第二创建部442,通过使由第一创建部441创建的第一以及第二子环境地图中的各外围部分相互一致地重叠来创建上述自身位置推测用的环境地图。在利用该重叠创建所述自身位置推测用的环境地图时,第二创建部442,通过对由第一创建部441创建的第一以及第二子环境地图中的每个点针对被相互重叠的点分别执行or运算,求出在上述自身位置推测用的环境地图中的每个点的值来创建上述自身位置推测用的环境地图。上述环境地图包含对于每个点(每个第一点)表示物体存在于该点的可能性的程度的物体存在似然度lh,第二创建部442,在创建上述自身位置推测用的环境地图时(进行了上述or运算之后),对于上述自身位置推测用的环境地图中的每个第一点,根据与该第一点对应的第一子环境地图的第一子点和与该第一点对应的第二子环境地图的第二子点之间的距离,将该第一点的物体存在似然度lh的值从设定值1变更设定为调整值(加权值)γ。所述物体存在似然度lh,在本实施方式可以取从0到1范围的值,1表示物体存在于该第一点的可能性最高,物体存在于该第一点的可能性随着从1到0而逐渐降低。进一步具体而言,第二创建部442,对于上述自身位置推测用的环境地图中的每个第一点,在该第一点的第一子点和第二子点之间的上述距离在预先设定的规定的阈值th以上的情况下,将该第一点的物体存在似然度lh的值从设定值1变更设定为调整值(加权值)γ。所述阈值th可以例如从多个样本预先适当地设定,所述调整值γ也可以例如从多个样本在大于0小于1的范围(0<γ≦1)适当地设定。另外,在本实施方式,上述物体存在似然度lh是从0到1的范围的值,但是并不局限于此,例如,也可以设定为从0到100的范围等任意的范围。
35.自身位置推测部42,基于用环境识别传感器1测量到的第三测量结果以及存储在存储部8的自身位置推测用的环境地图,推测自身位置。自身位置推测采用例如扫描匹配法或粒子滤波法等已知的常规方法。
36.调整部43,基于用环境识别传感器1测量到的上述第三测量结果以及存储在存储部8的自身位置推测用的环境地图,更新上述自身位置推测用的环境地图并将其存储到存储部8。调整部43功能性地具备似然度更新部431以及似然度设定部432。
37.似然度更新部431,基于用环境识别传感器1测量到的上述第三测量结果以及存储在存储部8的自身位置推测用的环境地图,对于自身位置推测用的环境地图中的每个第一点,判断是否更新(变更)该第一点的物体存在似然度,并基于该判断结果,更新该第一点的
物体存在似然度。进一步具体而言,似然度更新部431,通过使与基于用环境识别传感器1测量到的第三测量结果测量了物体的点对应的、上述自身位置推测用的环境地图中的物体存在似然度lh提高增幅值α(lh+α
→
lh≦上限值)来更新上述自身位置推测用的环境地图,通过使与基于用环境识别传感器1测量到的第三测量结果没有测量到物体的点对应的、上述自身位置推测用的环境地图中的物体存在似然度lh降低减幅值β(lh-β
→
lh≥下限值)来更新上述自身位置推测用的环境地图。增幅值α以及减幅值β分别例如从多个样本适当地设定。增幅值α以及减幅值β是绝对值,既可以是相同的值,也可以是不同的值。
38.似然度设定部432将用似然度更新部431更新的自身位置推测用的环境地图存储设定到存储部8的环境地图信息存储部81。
39.控制处理部4、输入部5、显示部6、if部7以及存储部8例如可以由具备用于向环境识别传感器1、移动部2发送接收数据的接口电路的台式或笔记本式等的计算机构成。
40.另外,在本实施方式,用环境识别传感器1以及控制处理部4的环境地图创建部44构成环境地图创建装置的一个例子。用环境识别传感器1、存储部8的环境地图信息存储部81以及控制处理部4的自身位置推测部42构成自身位置推测装置的一个例子。控制部41相当于基于用上述自身位置推测装置推测出的自身位置控制上述移动部的自主移动控制部的一个例子。
41.其次,对本实施方式的自主移动体的动作进行说明。首先,对创建自身位置推测用的环境地图的动作进行说明,其次,对自身位置推测以及自主移动的动作进行说明。
42.首先,对创建自身位置推测用的环境地图的动作进行说明。图2是表示在上述自主移动体、有关创建自身位置推测用的环境地图的动作的流程图。图3是用于说明作为一个例子的第一环境以及在上述第一环境的第一子环境地图的示意图。图3a表示在第一环境的规定的空间(区域)fs,图3b表示第一子环境地图mpa的一部分。图4是用于说明作为一个例子的第二环境以及在上述第二环境的第二子环境地图的示意图。图4a表示在第二环境的上述规定的空间(区域)fs,图4b表示第二子环境地图mpb的一部分。图5是用于说明在创建上述自身位置推测用的环境地图时、使上述第一子环境地图与上述第二子环境地图相互重叠的方法的示意图。图5a示意性地表示了第一子环境地图mpa,图5b示意性地表示了相对于第一子环境地图mpa旋转了的第二子环境地图mpb,图5b示意性地表示通过旋转第二子环境地图mpb从而第一子环境地图mpa与第二子环境地图mpb相互重叠的情况。图6是用于说明作为一个例子的上述自身位置推测用的环境地图的示意图。图6a表示自身位置推测用的环境地图mpp的一部分,该自身位置推测用的环境地图mpp通过,如图5c所示,使第一以及第二子环境地图mpa、mpb的各外围部分相互一致地重叠,对第一以及第二子环境地图mpa、mpb中的每个点,针对相互重叠的点分别进行or运算而创建,图6b表示自身位置推测用的环境地图mps的一部分,该自身位置推测用的环境地图mps通过对图6a所示的自身位置推测用的环境地图mpp中的每个第一点,根据在该第一点与上述对应点之间的距离,将该第一点的物体存在似然度lh的值从设定值1变更为调整值(加权值)γ。
43.这样的自主移动体vc(环境地图创建装置、自身位置推测装置),如果接通省略图示的电源,自主移动体vc就会执行必要的各部的初始化,开始工作。通过执行控制处理程序,控制处理部4功能性地具备控制部41、自身位置推测部42、调整部43以及环境地图创建部44。
44.而且,如果用户(操作人员)指示开始创建自身位置推测用的环境地图,自主移动体vc,如图2所示,在第一环境,用环境识别传感器1收集物体的方向以及距离的数据作为第一测量结果(s11),并基于在该第一环境用环境识别传感器1测量到的第一测量结果创建环境地图作为第一子环境地图(s12)。
45.进一步具体而言,自主移动体vc,在第一环境的规定的空间例如环绕路径移动,并且在该移动期间,环境识别传感器1以规定的采样间隔测量物体的方向以及距离的数据作为第一测量结果,并将第一测量结果输出到控制处理部4。上述规定的空间是想要使该自主移动体vc自主地移动的任意的空间,例如,工厂或楼房等的设施等。自主移动体vc是适于用途的合适的装置,例如,为运送物品的物流车辆或搬运车辆(搬运机器人)、进行清扫的清扫车辆或清扫机器人以及进行巡回保安的保安车辆(保安机器人)等。自主移动体vc,在本实施方式,作为一个例子,是在工厂内搬运货物的搬运车辆。上述第一环境是例如制造装置或工具等规定的物体被配置在上述规定的空间的状况。环境地图创建部44的第一创建部441基于上述第一测量结果创建第一子环境地图。例如,第一创建部441通过已知的slam(simultanous localization and mapping)法来创建第一子环境地图。该slam法是一边移动一边进行自身位置的推测以及环境地图的创建的技术。在该slam法,首先,决定初始的自身位置(开始位置),创建在当前时刻t=0的环境地图。其次,推测在时刻t+1的自身位置,基于在时刻t的环境地图,修正上述推测出的自身位置,创建在时刻t+1的环境地图,更新在时刻t创建的环境地图。以下,重复这些处理。在利用上述slam法创建环境地图时,也可以实施通过绕上述环绕路径一周测量相同的点来减少累计误差的环路闭合(loop closure)。另外,在环路闭合,环绕路径的开始位置和结束位置即可以一致也可以不一致,即使是在不一致的情况下,通过分别推测开始位置和结束位置来识别结束位置相对于开始位置的位置也可以环路闭合。
46.由此,如图3a所示,如果对将五个物体ob1至ob5配置在规定的各位置的第一环境的规定的空间fs执行上述的处理s11以及处理s12的各个处理,可以创建图3b所示的在第一环境的第一子环境地图mpa。图3b图示了第一子环境地图mpa之中的包含物体ob1的一部分。在图3所示的例子,在以附图左上角作为坐标原点的xy正交坐标系,对于每个点用上述物体存在似然度lh来表示第一子环境地图mpa。物体存在似然度lh,如上所述,是从0到1的范围的值,通过执行上述的处理s11以及处理s12的各个处理,在认为物体存在的点物体存在似然度lh为1,在认为物体不存在的点物体存在似然度lh为0。可以通过以认为物体存在的上述点的物体存在似然度lh(在该例子为lh=1)为顶点(峰值)成为规定的分布(例如,高斯分布等)的方式,对认为物体存在的点的周围的每个点分别分配物体存在似然度lh(在该例子lh<1)。在图3b所示的例子,相当于物体ob1的表面的位置的每个点的各上述物体存在似然度lh为1。另外,在图3b,为了便于图示,仅图示了对认为物体存在的点(2、2)的周围的每个点(0、0)至(4、4)分配的物体存在似然度w1、w2(0<w2<w1<1),但省略了对认为物体存在的点(2、2)的周围的其它的每个点分配的物体存在似然度w1、w2和对认为物体不存在的点的上述物体存在似然度为0的记载(图示)。在此,点(4、1)以及点(4、3)的各物体存在似然度lh相对于认为物体存在的点(2、2)被分配为w2,相对于认为物体存在的点(3、2)、点(4、2)、点(5、2)被分配为w1。点(1、4)以及点(3、4)的各物体存在似然度lh也相同。而且,以下图示的环境地图也同样省略了w1、w2、0的记载(图示)。
47.其次,通过用户将上述规定的空间从第一环境变更为第二环境。例如,在图3a所示的第一环境的规定的空间fs,如图4a所示,三个物体ob6至ob8被追加配置在规定的各位置。在图4a所示的例子,物体ob6与物体ob1接触(安装),物体ob7与物体ob2接触(安装),物体ob8与物体ob3接触(安装)。如此追加配置的物体ob6至ob8,例如是制造装置的附件、零部件安装装置的供料台车、作业台(作业机)、零部件箱、工具箱等,可根据上述规定的空间的用途或种类等而适当地进行选择。作为一个例子,在规定的空间fs常设的物体ob的环境可以用第一环境表示,根据需要适当地配置的物体ob的环境可以用第二环境表示。通过对在第一环境的规定的空间fs配置可追加的可能想到的所有的物体ob,即使环境从第一环境发生变化,也能推测更正确的自身位置。
48.返回到图2,其次,自主移动体vc,在第二环境,用环境识别传感器1收集物体的方向以及距离的数据作为第二测量结果(s13),基于用环境识别传感器1在该第二环境测量出的第二测量结果,创建环境地图作为第二子环境地图(s14)。处理s13以及处理s14的各个处理分别与上述处理s11以及处理s12的各个处理同样地被执行。由此,如果对图4a所示的在第二环境的上述规定的空间fs执行上述处理s13以及处理s14的各个处理,就可以创建图4b所示的在第二环境的第二子环境地图mpb。图4b图示了包含第二子环境地图mpb之中的物体ob1以及物体ob6的一部分。在图4b所示的例子,除了因物体ob1与物体ob6接触而被隐藏的各表面的各位置之外,相当于表面物体ob1以及物体ob6的各表面的各位置的每个点的各所述物体存在似然度lh为1(相当于因物体ob1与物体ob6接触而被隐藏的各表面的各位置的每个点的各所述物体存在似然度lh为0)。
49.其次,自主移动体vc,基于用第一创建部441创建的第一以及第二子环境地图,创建自身位置推测用的环境地图(s15)。
50.进一步具体而言,第二创建部442,通过使用第一创建部441创建的第一以及第二子环境地图中的各外围部分相互一致地重叠,来创建上述自身位置推测用的环境地图。进一步详细而言,对于第一子环境地图mpa的每个点paj(j=1、2、3、
……
、n),使最接近该点paj的第二子环境地图mpb的点pbk(k=1、2、3、
……
、m)相互对应(使最接近点相互对应),以使这些对应点之间paj、pbk的欧几里德距离(euclid distance)的总和成为最小的方式,通过重复收束运算求出第二子环境地图mpb相对于第一子环境地图mpa的平移量以及旋转量,从而使第二子环境地图mpb与第一子环境地图mpa相互重叠。由此,例如,图5b所示的第二子环境地图mpb被平移以及旋转,如图5c所示,与图5a所示的第一子环境地图mpa重叠。另外,在图5c中,为了方便图示,第一子环境地图mpa和第二子环境地图mpb的外围部分稍微错开地进行了图示。在此,第二子环境地图mpb被第一子环境地图mpa重叠,也可以是第一子环境地图mpa被第二子环境地图mpb重叠。
51.在进行该重叠创建自身位置推测用的环境地图时,第二创建部442,通过对用第一创建部441创建的第一以及第二子环境地图中的每个点,针对相互重叠的点分别执行or运算,求出在上述自身位置推测用的环境地图中的每个点的值来创建上述自身位置推测用的环境地图。例如,对于图3b所示的第一子环境地图mpa以及图4b所示的第二子环境地图mpb中的每个点,通过对相互重叠的点分别进行or运算求出上述自身位置推测用的环境地图中的每个点的值。在图3b以及图4b所示的例子中,第一子环境地图mpa的点(0、0)和第二子环境地图mpb的点(0、0)相互重叠,对于第一子环境地图mpa的点(0、0)的物体存在似然度lh的
值0和第二子环境地图mpb的点(0、0)的物体存在似然度lh的值0进行or运算,该值0为上述自身位置推测用的环境地图中的点(0、0)的物体存在似然度lh的值0。而且,例如,第一子环境地图mpa的点(6、2)和第二子环境地图mpb的点(6、2)相互重叠,对第一子环境地图mpa的点(6、2)的物体存在似然度lh的值1和第二子环境地图mpb的点(6、2)的物体存在似然度lh的值1进行or运算,该值1为上述自身位置推测用的环境地图中的点(6、2)的物体存在似然度lh的值1。而且,例如,第一子环境地图mpa的点(8、4)和第二子环境地图mpb的点(8、4)相互重叠,对第一子环境地图mpa的点(8、4)的物体存在似然度lh的值0和第二子环境地图mpb的点(8、4)的物体存在似然度lh的值1进行or运算,该值1为上述自身位置推测用的环境地图中的点(8、4)的物体存在似然度lh的值1。由此,根据图3b所示的第一子环境地图mpa和图4b所示的第二子环境地图mpb创建图6a所示的自身位置推测用的环境地图mpp。
52.如此创建的自身位置推测用的环境地图mpp,被存储在环境地图信息存储部81,用于推测自身位置,但是,在本实施方式也可以实施以下的处理s16。
53.返回到图2,其次,第二创建部442,在创建上述自身位置推测用的环境地图时(进行了上述or运算之后),对于上述自身位置推测用的环境地图中的每个第一点,根据与该第一点对应的第一子环境地图的第一子点和与该第一点对应的第二子环境地图的第二子点之间的距离,将该第一点的物体存在似然度lh的值从设定值1变更设定为调整值(加权值)γ。在本实施方式,第二创建部442,对于上述自身位置推测用的环境地图中的每个第一点,判断在该第一点的第一子点和第二子点之间的上述距离是否在上述规定的阈值th以上(s16)。在该判断的结果是上述距离在阈值th以上的情况下(是),第二创建部442在执行了处理s17之后执行处理s18。另一方面,在上述判断的结果是上述距离不在阈值th以上的情况下(上述距离小于阈值th的情况,否),第二创建部442执行处理s18。
54.在该处理s17,第二创建部442,将该第一点的物体存在似然度lh从设定值1变更为调整值γ,调整该第一点的物体存在似然度,然后,执行处理s18。
55.通过处理s16以及处理s17的各个处理,第二创建部442,对于上述自身位置推测用的环境地图中的每个第一点,在该第一点的第一子点和第二子点之间的上述距离在上述规定的阈值th以上的情况下,将该第一点的物体存在似然度的值从设定值1变更为调整值(加权值)γ,另一方面,在上述距离小于上述规定的阈值th的情况下,不对该第一点的物体存在似然度的值进行变更而保持原样。由此,例如,图6a所示的环境地图mpp被变更为图6b所示的环境地图mps。即,在第一子环境地图以及第二子环境地图,如果被认为物体仅存在于子环境地图的其中一方的点的上述距离相对地变大超过了上述规定的阈值th,物体存在似然度lh就被变更为调整值γ。另一方面,如果物体存在于子环境地图的双方的点的上述距离相对地变小从而小于上述规定的阈值th,物体存在似然度lh就不被变更而保持不变。
56.在上述处理s18,自主移动体vc将通过环境地图创建部44如上所述创建的自身位置推测用的环境地图存储到存储部8的环境地图信息存储部81,结束本处理。
57.通过执行如上所述的各处理,可以创建自身位置推测用的环境地图,并将其存储到环境地图信息存储部81。
58.其次,对自身位置推测以及自主移动的动作进行说明。图7是表示在上述自主移动体、有关自身位置推测的动作的流程图。
59.如果用户(操作人员)指示开始自主移动,自主移动体vc就通过以规定的的时间间
隔重复执行以下的各处理,一边推测自身位置一边自主地移动。
60.在图7,首先,自主移动体vc通过环境识别传感器1收集物体的方向以及距离的数据作为第三测量结果(s21)。
61.其次,自主移动体vc,通过控制处理部4的自身位置推测部42,基于在处理s21用环境识别传感器1测量到的第三测量结果以及存储在存储部8的自身位置推测用的环境地图,利用例如扫描匹配法或粒子滤波法等公知的常规方法推测自身位置(s22)。另外,该自身位置推测即可以利用测距法或者也可以利用基于测距法而推测的自身位置即所谓的传感器融合技术(sensor fusion)来推测自身位置。上述传感器融合技术是为了减少误差(误认),将从多个传感器获得的各结果进行汇总(融合)获得一个结果的公知的技术。为此,自主移动体vc,如图1中虚线所示,还可以进一步具备与控制处理部4连接、按照控制处理部4的控制测量里程的测距传感器3。这样的测距传感器3例如具备用于测量移动部2的驱动轮或辅助轮等的左右一对车轮各自的旋转量的旋转编码器(rotary encoder)等,控制处理部4基于上述各旋转量求出自主移动体vc的移动方向以及移动量作为里程(odmetry)。
62.其次,自主移动体vc,利用控制处理部4的调整部43的似然度更新部431,判断在处理s22是否推测出了自身位置(s23)。在判断的结果是推测出了自身位置的情况下(是),自主移动体vc执行处理s24。另一方面,在判断的结果是没能推测出自身位置的情况下(否),自主移动体vc执行处理s31。
63.在该处理s31,自主移动体vc通过控制处理部4执行预先定义的规定的错误处理并结束这次的处理。上述规定的错误处理可以适当地进行设定,例如,为向比本处理的程序位于上位的程序通知自身位置推测的错误等。
64.在上述处理s24,自主移动体vc,利用似然度更新部431使通过处理s21在测量点的物体存在似然度lh提高增幅值α(lh+α
→
lh≦1),从而与存储在环境地图信息存储部81的自身位置推测用的环境地图一致,然后执行处理s25。由此,例如,如果持续地安装附件,所述附件的存在在自身位置推测用的环境地图中被强化,就像常设的物体一样而被对待。通过调整增幅值α可以调整上述强化的速度。在此,使物体存在似然度lh提高增幅值α的结果,当超过物体存在似然度lh的上限值时,物体存在似然度lh就被钳制(固定)在上限值。在本实施方式,因为物体存在似然度lh的上限值为1,所以执行处理s24的结果,物体存在似然度lh不会超过上限值1。
65.在处理s25,自主移动体vc利用似然度更新部431判断是否存在以下的点,该点存在于被存储在环境地图信息存储部81的自身位置推测用的环境地图中,但是通过处理s21并没有测量到。该判断的结果为不存在上述没有测量到的点的情况下(否),自主移动体vc接着执行处理s27。另一方面,上述判断的结果为存在上述没有测量到的点的情况下(是),自主移动体vc接着执行处理s26然后执行处理s27。
66.在处理s26,自主移动体vc利用似然度更新部431使与基于用环境识别传感器1测量到的第三测量结果没有测量到物体的点对应的、在上述自身位置推测用的环境地图中的物体存在似然度lh下降减幅值β(lh-β
→
lh≥下限值)。由此,例如,如果不持续地安装假设想要安装的附件,上述附件的存在就会以在自身位置推测用的环境地图中逐渐淡出的方式被弱化。通过调整减幅值β可以调整上述弱化的速度。通过使增幅值α和减幅值β的绝对值为不同的值,也可以使上述强化的速度与上述弱化的速度相互不同。在此,使物体存在似然度
lh下降减幅值β的结果,当下降到低于物体存在似然度lh的下限值时,物体存在似然度lh被钳制(固定)在下限值。在本实施方式,因为物体存在似然度lh的下限值为0,所以执行处理s26的结果,物体存在似然度lh不会低于下限值0。
67.在上述处理s27,自主移动体vc利用控制处理部4的调整部43的似然度设定部432,将通过执行上述的处理s24至处理s26的各处理而被更新的自身位置推测用的环境地图存储到环境地图信息存储部81,更新被存储在环境地图信息存储部81的自身位置推测用的环境地图,然后执行处理s28。
68.在处理s28,自主移动体vc,基于如上所述推测的自身位置控制移动部2,自主地移动并结束这次的处理。例如,自主移动体vc,以从上述推测的自身位置朝向预先设定的目标位置的方式,一边避开在环境地图表示的物体(障碍物)或由环境识别传感器1检测到的物体(例如作业人员等)一边进行移动。
69.通过以规定的时间间隔重复执行上述的各处理,自主移动体vc一边推测自身位置一边自主地移动。
70.如上所述,实施方式涉及的自主移动体vc所具备的自身位置推测用的环境地图创建装置(在本实施方式为环境识别传感器1以及环境地图创建部44)以及安装在该装置的自身位置推测用的环境地图创建方法,基于在第一环境的第一子环境地图以及在第二环境的第二子环境地图创建自身位置推测用的环境地图。在利用了该环境地图的自身位置推测中,在实际的环境不仅仅是第一环境即使是在第二环境的情况下,也能够推测自身位置,由此能更正确地推测自身位置。因此,上述环境地图创建装置以及环境地图创建方法能够创建可以更正确地推测自身位置的自身位置推测用的环境地图。
71.利用图8对本实施方式的作用效果更具体地进行说明。图8是用于说明在上述自主移动体、有关自身位置推测的第一实施方式的作用效果的示意图。图8a表示自主移动体vc移动的空间为第三环境的情况,图8b表示上述空间为第四环境的情况,图8c表示利用了比较例的环境地图的上述空间为第三环境的情况,图8d表示利用了比较例的环境地图的上述空间为第四环境的情况。
72.比较例的自身位置推测用的环境地图,如图8c所示,是针对在规定的空间配置了物体(装置a)oba但没有配置物体obb的第三环境空间而创建的地图。该第三环境相当于上述的第一环境。
73.在该第三环境的空间,如果利用比较例的环境地图推测自身位置,如图8c所示,因为比较例的环境地图包含物体oba的信息,所以环境识别传感器的测量结果与比较例的环境地图相对良好地吻合。为此,可以正确地推测自身位置。另一方面,在上述规定的空间配置了物体oba以及物体obb的第四环境的空间,如果利用比较例的环境地图推测自身位置,如图8d所示,因为比较例的环境地图不包含物体obb的信息,所以在环境识别传感器的测量结果与比较例的环境地图的吻合方面会产生差异。为此,难以正确地推测自身位置。该第四环境相当于上述的第二环境。对于这样的比较例,如果从上述第三环境变化为上述第四环境,就难以正确地推测自身位置。
74.对此,本实施方式,在图8所示的例子,基于在上述第三环境的第一子环境地图以及在上述第四环境的第二子环境地图创建自身位置推测用的环境地图。因此,在上述第三环境的空间,如果利用实施方式的环境地图推测自身位置,如图8a所示,因为实施方式的环
境地图包含物体oba的信息,所以环境识别传感器的测量结果与实施方式的环境地图能相对良好地吻合。为此,可以正确地推测自身位置。而且,在上述第四环境的空间,如果利用实施方式的环境地图推测自身位置,如图8b所示,因为实施方式的环境地图包含物体obb的信息,所以环境识别传感器的测量结果与实施方式的环境地图能相对良好地吻合。因此,可以正确地推测自身位置。在这样的实施方式,即使从上述第三环境变化为上述第四环境或者反过来从上述第四环境变化为上述第三环境,也能正确地推测自身位置。
75.在上述环境地图创建装置以及环境地图创建方法,使第一以及第二子环境地图中的各外围部分相互一致地重叠。在第一以及第二环境分别为在同一空间内的环境的情况下,第一子环境地图的外围部分和第二子环境地图的外围部分大体上一致。为此,利用了这样的特性的上述环境地图创建装置以及环境地图创建方法,即使是在第一子环境地图和第二子环境地图例如因旋转等相对地偏离的情况下,也能更正确地创建上述自身位置推测用的环境地图。
76.上述环境地图创建装置以及环境地图创建方法,根据第一以及第二子点之间的距离设定在该第一点的物体存在似然度的值。与自身位置推测用的环境地图中的第一点对应的上述第一以及第二子点之间的距离,在上述第一点,当物体分别存在于上述第一以及第二环境时被认为相对地接近,在上述第一点,当物体只存在于第一以及第二环境之中的任意一个环境时被认为相对地变远。而上述环境地图创建装置以及环境地图创建方法,因为根据上述第一以及第二子点之间的距离设定在该第一点的物体存在似然度的值,所以可以将在第一环境和第二环境之间的变化反映到自身位置推测用的环境地图上。
77.图9是用于说明在上述自主移动体、有关自身位置推测的第二实施方式的作用效果的示意图。图9a表示没有调整物体存在似然度的情况,图9b表示没有调整(应为调整了)物体存在似然度的情况。
78.在自身位置推测用的环境地图中,例如,如图9a(相当于上述的图6a)所示,与不是在上述第三环境配置而是在上述第四环境配置的物体obb(应为obb)对应的物体存在似然度lh与在上述第三以及第四环境配置的物体oba对应的物体存在似然度lh即可以相等,也可以如图9b(相当于上述的图6b)所示,相对于与物体oba对应的物体存在似然度lh,相对地调整与物体obb(应为obb)对应的物体存在似然度lh。在图9b所示的例子,以相对于与物体oba对应的物体存在似然度lh变小的方式调整与物体obb(应为obb)对应的物体存在似然度lh。另外,也可以以相对于与物体obb对应的物体存在似然度lh变大的方式调整与物体oba(应为oba)对应的物体存在似然度lh。上述环境地图创建装置以及环境地图创建方法可以如此地将上述第三环境(相当于第一环境)与上述第四环境(相当于第二环境)之间的变化反映到自身位置推测用的环境地图上。
79.另外,从利用图8进行的说明可以看出,图9a(图6a)所示的自身位置推测用的环境地图也可以用作实施方式涉及的自身位置推测用的环境地图。
80.实施方式中的自主移动体vc所具备的自身位置推测装置(在本实施方式为环境识别传感器1、环境地图信息存储部81以及自身位置推测部42),因为存储上述环境地图创建装置创建的自身位置推测用的环境地图,并在推测自身位置之际进行利用,所以能更正确地推测自身位置。
81.上述环境地图创建装置以及环境地图创建方法,因为基于在第一环境的第一子环
境地图以及在第二环境的第二子环境地图创建一个自身位置推测用的环境地图,所以上述自身位置推测装置,在推测自身位置之际,与分别对第一子环境地图以及第二子环境地图进行对照相比较,可以减少信息处理量。因此,在利用具有相同的信息处理能力的自身位置推测装置的情况下,能够缩短信息处理时间。
82.实施方式的自主移动体vc,因为具备能更正确地推测自身位置的上述的自身位置推测装置,所以能更正确地进行自主移动。
83.上述自主移动体vc,因为基于第三测量结果以及自身位置推测用的环境地图更新上述自身位置推测用的环境地图,所以可以根据自主移动时的实际的环境来更新自身位置推测用的环境地图,即使环境发生了变化也能正确地推测自身位置。
84.该说明书如上所述,对各实施方式的技术进行了说明,其主要技术总结如下。
85.本发明的一方面涉及的环境地图创建装置,是创建自身位置推测用的环境地图的环境地图创建装置,其包括:环境识别传感器,用于测量物体的方向和到所述物体为止的距离;第一创建部,基于用所述环境识别传感器在第一环境测量到的第一测量结果创建环境地图作为第一子环境地图,基于用所述环境识别传感器在包含所述第一环境但不同于所述第一环境的第二环境测量到的第二测量结果创建环境地图作为第二子环境地图;以及,第二创建部,基于用所述第一创建部创建的第一以及第二子环境地图,创建所述自身位置推测用的环境地图。
86.这样的环境地图创建装置,基于在第一环境的第一子环境地图以及在第二环境的第二子环境地图,创建自身位置推测用的环境地图。在利用了该环境地图的自身位置推测中,在实际的环境不仅仅是第一环境即使是在第二环境的情况下,也能够推测自身位置,由此能更正确地推测自身位置。因此,上述环境地图创建装置能够创建可以更正确地推测自身位置的自身位置推测用的环境地图。
87.而且,在所述的环境地图创建装置,所述第二创建部,通过使用所述第一创建部创建的第一以及第二子环境地图中的各外围部分相互一致地重叠,创建所述自身位置推测用的环境地图。优选,在所述的环境地图创建装置,所述第二创建部,对于用所述第一创建部创建的第一以及第二子环境地图中的每个点,通过对相互重叠的点分别执行or运算求出在所述自身位置推测用的环境地图中的每个点的值从而创建上述自身位置推测用的环境地图。
88.在第一以及第二环境分别为在同一空间内的环境的情况下,第一子环境地图的外围部分和第二子环境地图的外围部分大体上一致。所述的环境地图创建装置,因为利用这样的特性使第一以及第二子环境地图的各外围部分相互一致地重叠,即使是在第一子环境地图和第二子环境地图例如因旋转等相对地偏离的情况下,也能更正确地创建所述自身位置推测用的环境地图。
89.而且,在所述的环境地图创建装置,所述环境地图包含针对每个点表示物体存在于该点的可能性的程度的物体存在似然度,在所述第二创建部创建所述自身位置推测用的环境地图之际,对于所述自身位置推测用的环境地图中的每个第一点,根据与该第一点对应的所述第一子环境地图的第一子点和与该第一点对应的所述第二子环境地图的第二子点的距离,设定在该第一点的物体存在似然度的值。
90.与第一点对应的第一以及第二子点之间的距离,在所述第一点,当物体分别存在
于第一以及第二环境时被认为相对地接近,在所述第一点,当物体只存在于第一以及第二环境之中的任意一个环境时被认为相对地变远。而上述环境地图创建装置,因为根据第一以及第二子点之间的距离设定在该第一点的物体存在似然度的值,所以可以将在第一环境和第二环境之间的变化反映到自身位置推测用的环境地图上。
91.本发明的另一方面涉及的环境地图创建方法,是创建自身位置推测用的环境地图的环境地图创建方法,包括以下步骤:测量物体的方向和到所述物体为止的距离的环境识别步骤;基于所述环境识别步骤在第一环境测量到的第一测量结果创建环境地图作为第一子环境地图,基于所述环境识别步骤在包含所述第一环境但不同于所述第一环境的第二环境测量到的第二测量结果创建环境地图作为第二子环境地图的第一创建步骤;以及,基于在所述第一创建步骤创建的第一以及第二子环境地图,创建所述自身位置推测用的环境地图的第二创建步骤。
92.这样的环境地图创建方法,基于在第一环境的第一子环境地图以及在第二环境的第二子环境地图,创建自身位置推测用的环境地图。在利用了该环境地图的自身位置推测中,在实际的环境不仅仅是第一环境即使是在第二环境的情况下,也能够推测自身位置,由此能更正确地推测自身位置。因此,上述环境地图创建方法能够创建可以更正确地推测自身位置的自身位置推测用的环境地图。
93.本发明的另一方面涉及的自身位置推测装置具备:上述任一项所述的环境地图创建装置;环境地图信息存储部,用于存储用所述环境地图创建装置创建的自身位置推测用的环境地图;以及,自身位置推测部,基于用所述环境识别传感器测量到的第三测量结果以及存储在所述环境地图信息存储部中的自身位置推测用的环境地图,推测自身位置。优选,自身位置推测装置具备:环境地图信息存储部,用于存储自身位置推测用的环境地图;环境识别传感器,用于测量物体的方向和到所述物体为止的距离;以及,自身位置推测部,基于用所述环境识别传感器测量到的测量结果以及存储在所述环境地图信息存储部中的自身位置推测用的环境地图,推测自身位置,其中,所述自身位置推测用的环境地图是基于在第一环境的环境地图以及在包含所述第一环境但不同于所述第一环境的第二环境的环境地图的环境地图。
94.这样的自身位置推测装置,因为存储用上述任一项所述的环境地图创建装置创建的自身位置推测用的环境地图,在进行自身位置推测时利用所述的环境地图,能够更正确地推测自身位置。
95.本发明的另一方面涉及的自主移动体具备:所述的自身位置推测装置;移动部,使本机移动;以及,自主移动控制部,基于用所述自身位置推测装置推测出的自身位置控制所述移动部。
96.这样的自主移动体,因为具备能够更正确地推测自身位置的所述的自身位置推测装置,能够更正确地进行自主移动。
97.而且,所述的自主移动体还具备:调整部,基于用所述环境识别传感器测量到的第三测量结果以及存储在所述环境地图信息存储部中的自身位置推测用的环境地图,更新所述自身位置推测用的环境地图并将其存储到所述环境地图信息存储部。
98.优选,在所述的自主移动体,所述环境地图包含针对每个点表示物体存在于该点的可能性的程度的物体存在似然度,所述调整部,通过提高与基于用所述环境识别传感器
测量到的第三测量结果测量到的物体的点对应的、在所述自身位置推测用的环境地图中的物体存在似然度,更新所述自身位置推测用的环境地图,通过降低与基于用所述环境识别传感器测量到的第三测量结果没有测量到物体的点对应的、在所述自身位置推测用的环境地图中的物体存在似然度,更新所述自身位置推测用的环境地图。
99.这样的自主移动体,因为基于第三测量结果以及自身位置推测用的环境地图更新所述自身位置推测用的环境地图,可以根据自主移动时的实际的环境更新自身位置推测用的环境地图,即使环境发生了变化,也能正确地推测自身位置。
100.为了表述本发明,上文中参照附图通过实施方式对本发明进行了适当且充分的说明,应认识到本领域技术人员能够容易地对上述实施方式进行变更和/或改良。因此,本领域技术人员实施的变更方式或改良方式,只要是没有脱离权利要求书记载的权利要求的权利范围的水平,则该变更方式或该改良方式可解释为被包含在该权利要求的权利范围内。
101.产业上的可利用性
102.根据本发明,可以提供推测本机的位置的自身位置推测装置及其自身位置推测方法以及具备该自身位置推测装置的自主移动体。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1