变倾角的塑形地层构造分析系统、方法及装置与流程
1.本发明涉及石油地质勘探领域,尤其涉及一种变倾角的塑形地层构造分析系统、方法及装置。
背景技术:
2.随着油气勘探程度的不断深入,塑形地层构造分析成为当前含油气盆地构造研究热点问题之一,油气需求的不断增长刺激了对塑形地层构造分析的研究。塑形地层构造发育过程的和空间变化规律研究直接影响到塑形地层构造的有效识别。
3.现有技术通过物理模拟实验,对塑形地层构造的形成进行了大量有益的研究。现有技术中出现用石英砂和聚合硅树脂为材料来模拟前陆褶皱冲断带塑形地层构造,用来模拟塑形地层刺穿型塑形地层构造。前陆盆地是以断层相关褶皱的变形机制也被发现。随着数值模拟技术的发展,通过模拟实验来进行侧向挤压和浮力等驱动力因素影响塑形地层底辟的形成的方法也陆续出现。1955年开始,刺穿粒状上覆岩层和流体上覆岩层的物理模拟,认为增加沉积物比源塑形地层耗尽对塑形地层底辟生长影响更大。有学者认为塑形地层构造受上覆岩层的沉降和强度的因素。另外,现有技术也采用石英和固体的石蜡来模拟塑形地层,这种方法注重塑形地层地层的伸展,扩大了塑形地层构造的范围。现有技术还出现用sgm聚合物作为源塑形地层,用玻璃珠作上覆岩层来模拟塑形地层的变形。塑形地层丘的形成和上覆塑形地层的厚度息息相关。现有技术还有采用适当配比的塑化松香模拟岩石圈延性层,研究边界驱动条件下塑性流动传播过程,实现了塑形地层构造变形的物理模拟。但现有技术依然存在以下三方面问题:一是,塑形地层构造变形机制认识不清及缺乏相应实验方法和装置,重力拉张,差异化负载、侧向挤压等均是形成塑形地层构造的动力,但对准确判断形成机制及差异化研究还没有良好的解决方案;二是,无法模拟变角度下塑形地层的流动及变形情况;三是,物理模拟实验受砂箱外边界影响较大,外部观测变形与内部不一样,难以反映真实变形特征。上述三个问题均使得塑形地层构造的物理模拟实验结果不准确,从而使得得到的塑形地层构造分析结果不准确。
技术实现要素:
4.本发明实施例提出一种变倾角的塑形地层构造分析系统,用以对塑形地层构造进行分析,获得塑形地层构造体的属性数据,准确度高,该系统包括:
5.塑形地层变形模拟模型构造单元、塑形地层实验模型构造单元、扫描单元和控制单元,其中,
6.塑形地层变形模拟模型构造单元包括角度调节器;
7.控制单元用于:根据目标区的叠后地震数据、测井数据和地质背景信息,确定目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数;接收塑形地层构造的面数据,对塑形地层构造的面数据进行三维重构,获得塑形地层构造的三维数据体;从塑形地层构造的三维数据体中,识别出塑形地层构造体,提取出塑形地层构造体的属性数据;
8.塑形地层实验模型构造单元,用于根据塑形地层实验模型的构造参数,构造塑形地层实验模型;
9.塑形地层变形模拟模型构造单元,用于通过旋转角度调节器,将塑形地层实验模型的倾角调整至目标塑形地层倾角,对调整后的塑形地层实验模型加载目标变形应力,获得塑形地层变形模拟模型;
10.扫描单元,用于对塑形地层变形模拟模型进行扫描,生成塑形地层构造的面数据,并发送至控制单元。
11.本发明实施例提出一种变倾角的塑形地层构造分析方法,用以对塑形地层构造进行分析,获得塑形地层构造体的属性数据,准确度高,该方法包括:
12.根据目标区的叠后地震数据、测井数据和地质背景信息,确定目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数,所述塑形地层实验模型的构造参数用于构造塑形地层实验模型;
13.获得塑形地层构造的面数据,对塑形地层构造的面数据进行三维重构,获得塑形地层构造的三维数据体,所述面数据是通过对塑形地层变形模拟模型进行扫描获得的,所述塑形地层变形模拟模型是基于目标塑形地层倾角,对塑形地层实验模型加载目标变形应力获得的;
14.从塑形地层构造的三维数据体中,识别出塑形地层构造体,提取出塑形地层构造体的属性数据。
15.本发明实施例提出一种变倾角的塑形地层构造分析方法,用以对塑形地层构造进行分析,获得塑形地层构造体的属性数据,准确度高,该装置包括:
16.数据获得模块,用于根据目标区的叠后地震数据、测井数据和地质背景信息,确定目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数,所述塑形地层实验模型的构造参数用于构造塑形地层实验模型;
17.三维数据体获得模块,用于获得塑形地层构造的面数据,对塑形地层构造的面数据进行三维重构,获得塑形地层构造的三维数据体,所述面数据是通过对塑形地层变形模拟模型进行扫描获得的,所述塑形地层变形模拟模型是基于目标塑形地层倾角,对塑形地层实验模型加载目标变形应力获得的;
18.分析模块,用于从塑形地层构造的三维数据体中,识别出塑形地层构造体,提取出塑形地层构造体的属性数据。
19.本发明实施例还提出了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述变倾角的塑形地层构造分析方法。
20.本发明实施例还提出了一种计算机可读存储介质,所述计算机可读存储介质存储有执行上述变倾角的塑形地层构造分析方法的计算机程序。
21.在本发明实施例中,所述系统包括塑形地层变形模拟模型构造单元、塑形地层实验模型构造单元、扫描单元和控制单元,其中,塑形地层变形模拟模型构造单元包括角度调节器;控制单元用于:根据目标区的叠后地震数据、测井数据和地质背景信息,确定目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数;接收塑形地层构造的面数据,对塑形地层构造的面数据进行三维重构,获得塑形地层构造的三维数据体;从塑形地层构
造的三维数据体中,识别出塑形地层构造体,提取出塑形地层构造体的属性数据;塑形地层实验模型构造单元,用于根据塑形地层实验模型的构造参数,构造塑形地层实验模型;塑形地层变形模拟模型构造单元,用于通过旋转角度调节器,将塑形地层实验模型的倾角调整至目标塑形地层倾角,对调整后的塑形地层实验模型加载目标变形应力,获得塑形地层变形模拟模型;扫描单元,用于对塑形地层变形模拟模型进行扫描,生成塑形地层构造的面数据,并发送至控制单元。其中,目标区的叠后地震数据、测井数据和地质背景信息,准确地确定了目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数,构造的塑形地层实验模型的精度高;角度调节器使得塑形地层实验模型可调整至目标塑形地层倾角,从而可模拟变角度下塑形地层的流动及变形情况,即获得了准确的塑形地层变形模拟模型;通过对塑形地层变形模拟模型进行扫描,可以获得含有准确内部结果的塑形地层构造的三维数据体,因此从含有准确内部结果的塑形地层构造的三维数据体中,识别出的塑形地层构造体的准确度高,最后提取出的塑形地层构造体的属性数据的准确高。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
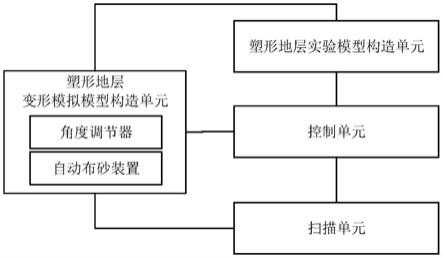
23.图1为本发明实施例中变倾角的塑形地层构造分析系统的示意图;
24.图2为本发明实施例中应用变倾角的塑形地层构造分析系统进行塑形地层构造分析的详细流程图;
25.图3为本发明实施例中塑形地层构造的地震剖面示意图;
26.图4为本发明实施例中塑形地层实验模型的示意图;
27.图5为本发明实施例中扫描单元采用ct扫描方式扫描塑形地层变形模拟模型的扫描位置示意图;
28.图6为本发明实施例中图5对应的面数据的示意图;
29.图7为本发明实施例中塑形地层构造演化过程示意图;
30.图8为本发明实施例中变倾角的塑形地层构造分析方法的流程图;
31.图9为本发明实施例中变倾角的塑形地层构造分析方法的流程图。
具体实施方式
32.为使本发明实施例的目的、技术方案和优点更加清楚明白,下面结合附图对本发明实施例做进一步详细说明。在此,本发明的示意性实施例及其说明用于解释本发明,但并不作为对本发明的限定。
33.在本说明书的描述中,所使用的“包含”、“包括”、“具有”、“含有”等,均为开放性的用语,即意指包含但不限于。参考术语“一个实施例”、“一个具体实施例”、“一些实施例”、“例如”等的描述意指结合该实施例或示例描述的具体特征、结构或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构或者特点可以在任何的一个或多个实施例或示
例中以合适的方式结合。各实施例中涉及的步骤顺序用于示意性说明本技术的实施,其中的步骤顺序不作限定,可根据需要作适当调整。
34.图1为本发明实施例中变倾角的塑形地层构造分析系统的示意图,如图1所示,该系统包括:
35.塑形地层变形模拟模型构造单元、塑形地层实验模型构造单元、扫描单元和控制单元,其中,
36.塑形地层变形模拟模型构造单元包括角度调节器;
37.控制单元用于:根据目标区的叠后地震数据、测井数据和地质背景信息,确定目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数;接收塑形地层构造的面数据,对塑形地层构造的面数据进行三维重构,获得塑形地层构造的三维数据体;从塑形地层构造的三维数据体中,识别出塑形地层构造体,提取出塑形地层构造体的属性数据;
38.塑形地层实验模型构造单元,用于根据塑形地层实验模型的构造参数,构造塑形地层实验模型;
39.塑形地层变形模拟模型构造单元,用于通过旋转角度调节器,将塑形地层实验模型的倾角调整至目标塑形地层倾角,对调整后的塑形地层实验模型加载目标变形应力,获得塑形地层变形模拟模型;
40.扫描单元,用于对塑形地层变形模拟模型进行扫描,生成塑形地层构造的面数据,并发送至控制单元。
41.在本发明实施例中,目标区的叠后地震数据、测井数据和地质背景信息,准确地确定了目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数,构造的塑形地层实验模型的精度高;角度调节器使得塑形地层实验模型可调整至目标塑形地层倾角,从而可模拟变角度下塑形地层的流动及变形情况,即获得了准确的塑形地层变形模拟模型;通过对塑形地层变形模拟模型进行扫描,可以获得含有准确内部结果的塑形地层构造的三维数据体,因此从含有准确内部结果的塑形地层构造的三维数据体中,识别出的塑形地层构造体的准确度高,最后提取出的塑形地层构造体的属性数据的准确高。
42.具体实施时,塑形地层可以是泥岩层、页岩层、盐层等,可以将三维叠后地震数据加载进landmark,geoeast等专业软件,解释获得地层和塑形地层等数据,将测井数据(例如测井las.曲线)加载进geolog等专业测井软件,识别获取塑形地层构造测井响应特征。然后,根据上述数据确定目标变形应力和塑形地层实验模型的构造参数。所述测井数据具体可以包括以下至少之一:声波曲线、密度曲线和伽马曲线。而目标塑形地层倾角,可根据地震剖面特征,利用三角函数关系计算获得。
43.在一实施例中,塑形地层实验模型的构造参数包括模型边界、物理模拟模型相似比、物理模拟时长相似比、模拟地层材料和模拟塑形地层材料中的其中一种或任意组合。
44.根据目标区的叠后地震数据、测井数据和地质背景信息,确定塑形地层实验模型的构造参数的具体过程如下:
45.首先,根据目标区的地质背景信息,确定塑形地层构造地质年代、塑形地层构造形成时间、变形应力、塑形地层构造演化及恢复情况;然后根据塑形地层构造地址年代和塑形地层构造形成时间,确定物理模拟时长相似比;根据地层伸缩率可根据构造演化及恢复,将古地层与现今地层进行对比,计算地层伸缩率。
46.根据目标区的叠后地震数据和测井数据,确定塑形地层构造位置、厚度以及在横向和纵向上的发育规模,从而和地层伸缩率一起,确定模型边界、物理模拟模型相似比。物理模拟模型相似比包括模型尺寸、厚度、密度、重力加速度、粘度、时间、动力相似参数等多个参数的物理模拟相似比。
47.塑形地层构造分析中通常使用的模拟地层材料主要包括各种粒度微玻璃珠、金刚砂、pvc粉、粘土、硅粉、铝粉、高岭石粉和石墨铅等,有时根据需要,也会使用一些混合材料。例如,可以采用石英砂来作为模拟地层材料。塑形地层构造分析中通常使用的模拟塑形地层材料包括颗粒状实验材料和塑性材料,其中颗粒状实验材料主要包括黏土、聚二甲基硅氧烷、蜂蜜和硅胶油灰等;塑性材料包括膏岩层和滑脱层等。为了获得更好的塑形地层流动性模拟,可以采用粘度较小的硅胶来作为模拟塑形地层材料,即硅胶粘度可以根据流动性需要可选可调。
48.在确定了塑形地层实验模型的构造参数后,塑形地层实验模型构造单元根据塑形地层实验模型的构造参数,构造塑形地层实验模型。
49.然后,塑形地层变形模拟模型构造单元通过旋转角度调节器,将塑形地层实验模型的倾角调整至目标塑形地层倾角,对调整后的塑形地层实验模型加载目标变形应力,获得塑形地层变形模拟模型。在一实施例中,所述变形应力包括重力和目标上覆差异沉积自然力;
50.塑形地层实验模型构造单元还包括自动布砂装置,用于对调整后的塑形地层实验模型加载目标上覆差异沉积自然力。
51.在上述实施例中,重力和目标上覆差异沉积自然力,可模拟塑形地层在造山带抬升时的流动和变形,在调整塑形地层实验模型的倾角至目标塑形地层倾角后,塑形地层在重力作用下流动,此时为了模拟沉积特性,用自动布砂装置对调整后的塑形地层实验模型加载目标上覆差异沉积自然力。
52.在一实施例中,自动布砂装置具体用于:通过调节如下参数中的至少之一将当前上覆差异沉积自然力调节至目标上覆差异沉积自然力:
53.布沙的速度,位置,频率,厚度。
54.上述自动布砂装置相比于人工布砂来说,自动化效率更高。
55.在构造完塑形地层变形模拟模型后,采用扫描单元,对塑形地层变形模拟模型进行扫描,生成塑形地层构造的面数据,并发送至控制单元,其中扫描单元可采用ct扫描方式或核磁共振方式,可根据研究需要及精度要求设置动态监测扫描位置、扫描频率,通过扫描单元获得的面数据越多,最后塑形地层构造精度越高。具体扫描过程可以如下:
56.s1:根据研究精度需求,设置不同的扫描频率;
57.s2:将塑形地层变形模拟模型的扫描位置放置于扫描单元下;
58.s3:将塑形地层变形模拟模型以一定速率匀速推入扫描单元,扫描塑形地层变形模拟模型的不同的面,获得连续的等间隔的面数据;
59.s4:将所述面数据发送至控制单元。
60.最后,接收塑形地层构造的面数据,对塑形地层构造的面数据进行三维重构,获得塑形地层构造的三维数据体。塑形地层构造的三维数据体便于塑形地层变形模拟模型的全方位识别和塑形地层丘属性量化研究。对塑形地层构造的面数据进行三维重构,即通过扫
描得到的已知面数据,构造出未知的面数据(两组相邻面数据之间的面数据),最后将所有面数据重新组合起来,即可形成塑形地层构造的三维数据体。可以借助软件或者其他计算机设备进行差值等重构方法的实现。采用差值法对塑形地层构造的面数据进行三维重构,即在两组相邻面数据(例如,两个灰度扫描图像)之间采用高斯差值等数学方法进行差值求出两组相邻面数据之间的面数据。采用拟合法对塑形地层构造的面数据进行三维重构,即通过某个已知的面数据,根据该面数据的变化规律来拟合其他面数据的形态,获得未知面数据的过程。
61.具体实施时,从塑形地层构造的三维数据体中,识别出塑形地层构造体的方法有多种,下面给出其中一个实施例。
62.在一个实施例中,控制单元具体用于:
63.根据塑形地层构造体的灰度特征值,从塑形地层构造的三维数据体中,识别出塑形地层构造体。
64.在上述实施例中,塑形地层构造体灰度特征值一般根据硅胶材料性质分析获得,塑形地层构造体的灰度特征值一般为650左右,灰度特征值为650以上的为塑形地层构造体,灰度特征值为650以下的为砂岩体,从塑形地层构造的三维数据体中,找出值为650的数据,形成塑形地层构造体。可以借助于灰度处理软件如vg等来实现塑形地层构造体的识别,相关变化例均应落入本发明的保护范围。
65.具体实施时,提取出塑形地层构造体的属性数据的方法有多种,下面给出其中一个实施例。
66.在一个实施例中,控制单元具体用于:
67.对塑形地层构造体进行切片处理;
68.从切片处理后的塑形地层构造体中提取出塑形地层构造体的属性数据。
69.在一实施例中,塑形地层构造体的属性数据包括塑形地层构造样式、塑形地层丘高度和塑形地层丘宽度中的其中一种或任意组合。
70.在上述实施例中,对塑形地层构造体进行切片处理时可从任意方向进行塑形地层构造切片,例如三维的x、y、z方向。
71.根据分析结果完成塑形地层构造变形演化,可指导塑形地层下油气勘探部署。
72.基于上述实施例,本发明提出如下一个实施例来说明应用变倾角的塑形地层构造分析系统进行塑形地层构造分析的详细流程,图2为本发明实施例中应用变倾角的塑形地层构造分析系统进行塑形地层构造分析的详细流程图,如图2所示,包括:
73.步骤201,控制单元根据目标区的叠后地震数据、测井数据和地质背景信息,确定目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数;
74.步骤202,塑形地层实验模型构造单元根据塑形地层实验模型的构造参数,构造塑形地层实验模型;
75.步骤203,塑形地层变形模拟模型构造单元通过旋转角度调节器,将塑形地层实验模型的倾角调整至目标塑形地层倾角,对调整后的塑形地层实验模型加载目标变形应力,获得塑形地层变形模拟模型;
76.步骤204,对塑形地层变形模拟模型进行扫描,生成塑形地层构造的面数据,并发送至控制单元;
77.步骤205,控制单元接收塑形地层构造的面数据,对塑形地层构造的面数据进行三维重构,获得塑形地层构造的三维数据体;
78.步骤206,控制单元根据塑形地层构造体的灰度特征值,从塑形地层构造的三维数据体中,识别出塑形地层构造体;
79.步骤207,控制单元对塑形地层构造体进行切片处理;从切片处理后的塑形地层构造体中提取出塑形地层构造体的属性数据。
80.当然,可以理解的是,上述详细流程还可以有其他变下面给出一具体实施例,来说明本发明实施例提出的方法的具体应用。
81.控制单元将目标区的叠后地震数据、测井数据和地质背景信息加载进软件geoeast中,获得目标区的塑形地层构造变形模拟模型的构造参数,图3为本发明实施例中塑形地层构造的地震剖面示意图,其中,塑形地层为盐层,测井数据必须包括声波曲线、密度曲线,伽马曲线。其中,模拟地层材料采用石英砂,模拟塑形地层材料采用硅胶。根据地震剖面特征,利用三角函数关系计算获得目标塑形地层倾角,在本实施例中,目标塑形地层倾角为5度,最后控制单元输出目标区的塑形地层实验模型的构造参数、目标塑形地层倾角、目标变形应力。
82.塑形地层实验模型构造单元根据目标区的塑形地层构造变形模拟模型的构造参数,将石英砂和硅胶在设定尺寸的砂箱中按比例进行构造,获得塑形地层实验模型,图4为本发明实施例中塑形地层实验模型的示意图。
83.塑形地层变形模拟模型构造单元通过旋转角度调节器,将塑形地层实验模型的倾角调整至目标塑形地层倾角5度(这一阶段称为塑形地层构造变形演化的抬升阶段,在抬升阶段前称为塑形地层构造变形演化的初始阶段),塑形地层在重力(指的是重力拉张)作用下流动(这一阶段称为塑形地层构造变形演化的重力拉张阶段),然后通过自动布砂装置,对调整后的塑形地层实验模型加载目标上覆差异沉积自然力(或称为差异负载),获得塑形地层变形模拟模型(这一阶段称为塑形地层构造变形演化的差异负载阶段)。本实施例中,依靠上覆地层的目标上覆差异沉积自然力和重力提供目标变形应力,及在构造变形过程中,不断地加大硅胶层上覆石英砂的上覆差异沉积自然力直至达到目标上覆差异沉积自然力,来促使硅胶层发生变形。
84.塑形地层变形模拟模型置于扫描单元中,设置不同的扫描频率,将塑形地层变形模拟模型的扫描位置放置于扫描单元下,将塑形地层变形模拟模型以一定速率匀速推入扫描单元,扫描塑形地层变形模拟模型的不同的面,采集连续的等间隔的面数据(或为面图像),采集方式包括连续采集和定点采集,在本实施例中,根据研究精度要求,选择连续采集方式,主要对变形过程进行动态监测。图5为本发明实施例中扫描单元采用ct扫描方式扫描塑形地层变形模拟模型的扫描位置示意图,图6为本发明实施例中图5对应的面数据的示意图。
85.控制单元接收塑形地层构造的面数据,通过将面数据加载进重构软件vg,对塑形地层构造的面数据进行三维重构,获得塑形地层构造的三维数据体;将三维数据体加载进行灰度编辑分析软件如vg中,根据塑形地层构造体的灰度特征值,从塑形地层构造的三维数据体中,识别出塑形地层构造体,本实施例中塑形地层构造体的灰度特征值为640。
86.采用定量分析的手段,从x、y、z各个方向对塑形地层构造体进行切片处理,实现在
不破坏塑形地层构造体的情况下对塑形地层构造的属性进行分析,获得塑形地层构造样式、塑形地层丘高度和塑形地层丘宽度,还可以得到塑形地层构造变形规律,本实施例中塑形地层构造变形规律为差异负载和重力拉张。根据分析,最后得到塑形地层构造变形演化过程,指导塑形地层下油气勘探部署。图7为本发明实施例中塑形地层构造演化过程示意图,其中i为初始阶段,ii为抬升阶段,iii为重力拉张阶段,iv为差异负载阶段。
87.综上所述,在本发明实施例提出的系统中,塑形地层变形模拟模型构造单元包括角度调节器;控制单元用于:根据目标区的叠后地震数据、测井数据和地质背景信息,确定目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数;接收塑形地层构造的面数据,对塑形地层构造的面数据进行三维重构,获得塑形地层构造的三维数据体;从塑形地层构造的三维数据体中,识别出塑形地层构造体,提取出塑形地层构造体的属性数据;塑形地层实验模型构造单元,用于根据塑形地层实验模型的构造参数,构造塑形地层实验模型;塑形地层变形模拟模型构造单元,用于通过旋转角度调节器,将塑形地层实验模型的倾角调整至目标塑形地层倾角,对调整后的塑形地层实验模型加载目标变形应力,获得塑形地层变形模拟模型;扫描单元,用于对塑形地层变形模拟模型进行扫描,生成塑形地层构造的面数据,并发送至控制单元。其中,目标区的叠后地震数据、测井数据和地质背景信息,准确地确定了目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数,构造的塑形地层实验模型的精度高;角度调节器使得塑形地层实验模型可调整至目标塑形地层倾角,从而可模拟变角度下塑形地层的流动及变形情况,即获得了准确的塑形地层变形模拟模型;通过对塑形地层变形模拟模型进行扫描,可以获得含有准确内部结果的塑形地层构造的三维数据体,因此从含有准确内部结果的塑形地层构造的三维数据体中,识别出的塑形地层构造体的准确度高,最后提取出的塑形地层构造体的属性数据的准确高。
88.本发明实施例还提出一种变倾角的塑形地层构造分析方法,图8为本发明实施例中变倾角的塑形地层构造分析方法的流程图,如图8所示,该方法包括:
89.步骤801,根据目标区的叠后地震数据、测井数据和地质背景信息,确定目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数,所述塑形地层实验模型的构造参数用于构造塑形地层实验模型;
90.步骤802,获得塑形地层构造的面数据,对塑形地层构造的面数据进行三维重构,获得塑形地层构造的三维数据体,所述面数据是通过对塑形地层变形模拟模型进行扫描获得的,所述塑形地层变形模拟模型是基于目标塑形地层倾角,对塑形地层实验模型加载目标变形应力获得的;
91.步骤803,从塑形地层构造的三维数据体中,识别出塑形地层构造体,提取出塑形地层构造体的属性数据。
92.在一实施例中,塑形地层实验模型的构造参数包括模型边界、物理模拟模型相似比、物理模拟时长相似比、模拟地层材料和模拟塑形地层材料中的其中一种或任意组合。
93.在一实施例中,所述变形应力包括重力和目标上覆差异沉积自然力。
94.在一实施例中,从塑形地层构造的三维数据体中,识别出塑形地层构造体,包括:
95.根据塑形地层构造体的灰度特征值,从塑形地层构造的三维数据体中,识别出塑形地层构造体。
96.在一实施例中,提取出塑形地层构造体的属性数据,包括:
97.对塑形地层构造体进行切片处理;
98.从切片处理后的塑形地层构造体中提取出塑形地层构造体的属性数据。
99.综上所述,在本发明实施例提出的方法中,根据目标区的叠后地震数据、测井数据和地质背景信息,确定目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数,所述塑形地层实验模型的构造参数用于构造塑形地层实验模型;获得塑形地层构造的面数据,对塑形地层构造的面数据进行三维重构,获得塑形地层构造的三维数据体,所述面数据是通过对塑形地层变形模拟模型进行扫描获得的,所述塑形地层变形模拟模型是基于目标塑形地层倾角,对塑形地层实验模型加载目标变形应力获得的;从塑形地层构造的三维数据体中,识别出塑形地层构造体,提取出塑形地层构造体的属性数据。在上述过程中,目标区的叠后地震数据、测井数据和地质背景信息,准确地确定了目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数,构造的塑形地层实验模型的精度高;所述塑形地层变形模拟模型是基于目标塑形地层倾角,对塑形地层实验模型加载目标变形应力获得的,从而可模拟变角度下塑形地层的流动及变形情况,即获得了准确的塑形地层变形模拟模型;通过对塑形地层变形模拟模型进行扫描,可以获得含有准确内部结果的塑形地层构造的三维数据体,因此从含有准确内部结果的塑形地层构造的三维数据体中,识别出的塑形地层构造体的准确度高,最后提取出的塑形地层构造体的属性数据的准确高。
100.本发明实施例还提出一种变倾角的塑形地层构造分析装置,图9为本发明实施例中变倾角的塑形地层构造分析方法的流程图,如图9所示,该装置包括:
101.数据获得模块901,用于根据目标区的叠后地震数据、测井数据和地质背景信息,确定目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数,所述塑形地层实验模型的构造参数用于构造塑形地层实验模型;
102.三维数据体获得模块902,用于获得塑形地层构造的面数据,对塑形地层构造的面数据进行三维重构,获得塑形地层构造的三维数据体,所述面数据是通过对塑形地层变形模拟模型进行扫描获得的,所述塑形地层变形模拟模型是基于目标塑形地层倾角,对塑形地层实验模型加载目标变形应力获得的;
103.分析模块903,用于从塑形地层构造的三维数据体中,识别出塑形地层构造体,提取出塑形地层构造体的属性数据。
104.综上所述,在本发明实施例提出的装置中,目标区的叠后地震数据、测井数据和地质背景信息,准确地确定了目标塑形地层倾角、目标变形应力和塑形地层实验模型的构造参数,构造的塑形地层实验模型的精度高;所述塑形地层变形模拟模型是基于目标塑形地层倾角,对塑形地层实验模型加载目标变形应力获得的,从而可模拟变角度下塑形地层的流动及变形情况,即获得了准确的塑形地层变形模拟模型;通过对塑形地层变形模拟模型进行扫描,可以获得含有准确内部结果的塑形地层构造的三维数据体,因此从含有准确内部结果的塑形地层构造的三维数据体中,识别出的塑形地层构造体的准确度高,最后提取出的塑形地层构造体的属性数据的准确高。
105.本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产
品的形式。
106.本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
107.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
108.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
109.以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1