一种电梯导轨直线度的误差补偿方法
1.本发明属于自动检测技术领域,具体涉及一种电梯导轨直线度的误差补偿方法。
背景技术:
2.电梯导轨直线度检测是电梯生产企业质量检验评定中一项重要工作,如何快捷、客观、准确地实现检测与评价电梯导轨直线度指标,一直受到各电梯导轨生产企业、质量监督部门以及科研院校等单位的关注。因此,科学、准确、快速地检测电梯导轨直线度是世界电梯导轨产业及相关科研部门所共同面临的课题。电梯导轨直线自动检测技术在国内外均有一定的研究基础,在对导轨进行直线度的检测时,国内外普遍会选择激光检测技术,因此,在对电梯导轨直线度进行检测时,首选是激光测距仪。国外已经有了较为成熟的商业产品,能够从检测设备中直接获得有效数据,而国内的直线度检测技术相对滞后。
3.在世界电梯导轨领域,电梯导轨直线度自动检测技术发展很快,达到了较高的水平。目前,西班牙塞维拉集团是全球电梯导轨领先者,拥有高精度导轨自动校直生产检测系统,意大利蒙特费罗拥有直线度自动检测机。这类设备可进行高速、连续检测,既有可靠性高、操作安全等优点,提高了导轨质量的检测精度,在国外已得到广泛应用。电梯导轨的自动检测设备在西班牙塞维拉集团和意大利蒙特费罗等国际大型导轨企业的带动下得到了长足的进步,大量企业也把各自最先进的导轨自动校直、校扭及检测技术带到了中国。但是,这类检测装备与技术仅适用于电梯导轨制造过程,为电梯导轨制造质量的检验,而非电梯导轨安装质量的检测。
4.在国内,大连拉特激光技术开发有限公司开发的jd电梯导轨智能激光检测仪是电梯导轨制造厂家和电梯安装公司对电梯t型导轨的直线度、扭曲度进行快速现场检测的专业仪器。其采用的激光、图形处理技术及数字信号处理技术都已达到国际领先水平。天津大学的研究人员开发了一套电梯导轨出厂质量自动检测系统,系统能测将出导轨三个面的直线度,通过数据处理可得到两侧面的平面度、导轨的垂直度和扭曲度。为了有效测量直线度,长春理工大学的孙卫家硕士提出采用激光干涉仪、电容非接触式传感器、a\d采集板相结合的技术,用计算机进行控制及数据处理。王孝坤院士提出利用激光跟踪仪对超长导轨进行测量,通过跟踪超长导轨上多点的空间坐标,对数据进行拟合求算出直线度。朱万彬院士提出利用激光位移传感器工件上的二维坐标,从而实现物体平面度的高精度测量。南京理工大学自动化学院的陈文昂等学者以工业控制计算机中心,结合先进的多轴运动控制板卡,配合系统程序实现对伺服电机、激光传感器、液压系统等硬件的控制,完成了电梯导轨的直线度检测与校直。
5.国内外流行的技术基本都是采用激光测距仪进行检测,但他们的基本前提几乎无一例外是测量单段导轨,不同之处只是在于测量仪器和原理方法等;目前,很少有学者研究全段测量,而且还没能得到实际应用。同时,这些研究的成果对于检测系统产生的误差并没有进行很好的分析与补偿。
技术实现要素:
6.本发明的目的在于提供一种检测精度高的电梯导轨直线度的误差补偿方法。
7.为了实现上述目的,本发明采用的技术方案如下:
8.一种电梯导轨直线度的误差补偿方法,所述方法包括两种情况:导轨顶面的载荷分布情况具有明显的规律性和导轨顶面载荷呈随机性分布,
9.所述导轨顶面的载荷分布情况具有明显的规律性的情况为上方导轨移动到某一位置,对应位置的力传感器测得的力的大小接近,这种情况下认为两个等间距随轿厢平行移动的力对电梯导轨持续作用使导轨产生变形,将导轨简化为简支梁模型,p1、p2是上下两个导靴传递给导轨的力,这两个力始终等间距地随着轿厢移动而平移,h为两个力之间的距离,为p1至导轨底端的距离,x为任一横截面的位置,l为导轨的长度,
10.简支梁的位移几何边界条件为
[0011][0012]
根据梁的弯曲理论和弯矩边界条件,得
[0013][0014]
设根据公式(1)、(2)得
[0015][0016]
导轨变形的挠曲线方程为
[0017][0018]
梁的总势能由弹性应变能q和荷载势能q
p
组成,梁的弹性模量为e,截面模量为i,则
[0019][0020][0021]
其中,
[0022]
梁的总势能s=q+q
p
,令得
[0023][0024]
导轨变形对直线度检测的影响取决于激光测距仪的位置,即将其代入公式(7)式,再将结果代入公式(4)式,可得该情况下导轨变形的挠曲线方程为:
[0025][0026]
所述导轨顶面载荷呈随机性分布的情况下,将力传感器布置在导轨顶面测量,导轨的长度为l m,每隔布置一个传感器,一共布置n+1个,这样,导轨受到的力可以以离散力的形式表现出来,采用瞬时记录的方法,获得导轨在单次连续测量过程中n-1次采集的n+1个位置共n
2-1个载荷数据,将n+1个位置的n-1次测量值取平均值表示该坐标的受力情况,然后将n+1个位置的载荷离散点绘制成散点图,并用五次多项式将其拟合,得到的载荷-位置分布曲线方程如下:
[0027]
y=a0+a1x+a2x2+a3x3+a4x4+a5x5(9)
[0028]
通过等间距的力来描述整个导轨的受力情况,每一点的力可认为是集中力,对于集中力,简支梁距离原点o为x的任意位置挠度表示为:
[0029][0030]
其中:e为弹性模量,f为集中载荷,a为集中力距离简支梁左端支点的距离,b为集中力距离简支梁右端支点的距离,l为导轨长度,i为截面模量,ei为简支梁的刚度,
[0031]
将(9)式在导轨长度l上积分即为导轨所受的力对于简支梁左端点a的力矩,设集中力位于处将力矩除以即可得到集中力p,
[0032]
以此集中力p代替分布在导轨顶面上的载荷,以求取导轨在顶面方向的变形挠度,
[0033][0034]
将p,带入公式(10),得到该情况下的挠曲线方程:
[0035][0036]
获得了导轨变形的挠曲线方程后,利用端点连线法求取导轨变形的挠度数据值,将同样用端点连线法处理的直线度形状曲线获得的直线度数值减去挠度数据值,即可得到
补偿后的导轨直线度数据。
[0037]
本发明与现有技术相比,其显著优点在于:
[0038]
本发明综合了激光测距技术、陀螺仪技术、数据采集技术、机电控制技术等,利用各硬件之间的组合关系构建了一套完整的电梯导轨直线度检测系统,并提供了基于该系统的误差补偿方法,力传感器的布置用于获得导轨的变形情况,确定导轨变形的挠曲线方程,将最后得到的直线度结果减去导轨因变形产生的挠度,从而提高检测精度。
附图说明
[0039]
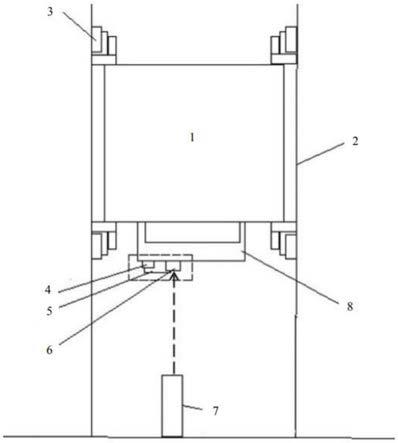
图1是本发明的检测原理图。
[0040]
图2是本发明载荷测量原理图。
[0041]
图3是本发明在导轨顶面的载荷分布情况具有明显的规律性情况下的误差补偿原理图。
[0042]
图4是本发明在导轨顶面载荷呈随机性分布的情况下误差补偿原理图。
[0043]
其中,1.轿厢,2.导轨,3.导靴,4.光电测距仪,5.陀螺仪,6.psd,7.激光准直仪,8.安装基座,9.力传感器。
具体实施方式
[0044]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0045]
以下结合具体实施例对本发明的实现进行详细的描述。
[0046]
首先介绍实现本发明方法的硬件部分
[0047]
(1)激光准直仪
[0048]
由于激光具有很好的方向性,所以利用激光可以产生一束稳定的射线。而激光准直仪7可以调节激光射出方向,使得激光可以垂直上射。激光准直仪的作用就是向psd照射激光。
[0049]
(2)相对位置确定模块
[0050]
由于检测装置安装在轿厢底部,它会随着轿厢微平动或微转动,因此需要检测出它的相对位置,即倾斜角度与水平位置。
[0051]
陀螺5:选择集成倾角传感器avt2000t,它具有高达0.001
°
的检测精度和0.0005
°
的分辨率,响应时间0.01s,可以实现频率为100hz以内的测量,达到检测需求。将它平行于轿厢底面安装,可以确定轿厢的倾斜角度。获得轿厢的倾斜角度后,即可建立虚拟重力线基准。
[0052]
位置敏感器件(psd)6,是一种基于非均匀半导体横向光电效应、高分辨率且实时性好的光电位置敏感器件。选择w103(1d-psd),平行轿厢底面安装,配合激光准直仪射出的激光可以确定轿厢的水平位置。
[0053]
(3)相对距离采集模块
[0054]
光电测距仪4:选择coms型激光位移传感器hg-c1100,测量范围在100
±
35mm内精度可达70μm,实际距离与电压输出直接成一次函数关系。将它安装于轿厢底面,其红外光线
平行于轿厢底面射与导轨上,测量轿厢与导轨的相对距离,从而最终获得导轨的直线度数据。
[0055]
(4)采集卡
[0056]
所使用的ua321型a/d数据采集卡采用usb来与pc端连接。8路同步采集,12位的较高采集精度,性价比较高。采集卡用以接受来自光电测距仪4和psd6的数据并同步输送给数据接收与处理模块。
[0057]
(5)力传感器
[0058]
力传感器等间距地布置在导轨顶面上,用于测量导轨在电梯运行过程中的受力情况。将测量得到的数据处理后即可获得导轨顶面的力与位置的关系。在此基础上,进一步根据材料力学的理论,分析导轨在垂直方向上的变形挠度。将最后检测的直线度结果去除变形的挠度即可获得真实的直线度。
[0059]
再介绍实现本发明方法的软件部分
[0060]
软件是整个测试系统中非常重要的一环,数据的采集、处理、显示、储存都是由软件部分来完成的。labview是一种能够提高编程效率的图形化编程语言,近年来在信息的采集及后续的许多操作方面有着非常广泛的应用,因此检测系统的软件部分采用labview来实现。
[0061]
检测系统的运行程序主要分为三大模块:数据采集模块、数据处理与显示模块、数据存储模块。
[0062]
(1)数据采集模块
[0063]
采集的数据主要由三部分组成:角度、距离、位置。对于角度采集,由于是集成传感器,可以将其直接连接于pc,利用visa的读与写命令进行控制;后两者通过采集卡进入pc,调用ua321型数据采集卡的动态链接库中的多通道多点采集函数。该模块除了数据的采集,还根据各仪器原理进行了电压值与实际值的函数关系转换,保证数据的直接可用性。
[0064]
(2)数据处理与显示模块
[0065]
该模块基于上一模块三项数据的输出,根据直线度检测系统的理论模型结果进行相应的数据运算和处理,并通过波形图进行实时的显示。在该模块中,还可以对检测结果的图像进行拟合,得到一条平滑曲线,反应直线度形状的变化情况。由于本发明还涉及对检测结果进行误差补偿,该模块还可以根据获得的导轨挠曲线方程,插入节点公式,对检测结果进行误差补偿。
[0066]
(3)数据存储模块
[0067]
在前面板上设置“路径选择”和“开始保存”按钮,可将采集到的数据以分隔符的电子表格形式保存到设置好的地址中,保存路径可以改动多次。
[0068]
本发明检测原理:结合图1,将主要由光电测距仪4、陀螺仪5、psd6组成的检测设备固定在安装基座8上,并固定在电梯轿厢1底部。在系统检测前,激光准直仪7向psd6垂直发射光束。打开电机驱动电梯轿厢1运行,检测装置跟随轿厢1在导靴3上的滑动下沿着导轨2垂直移动。轿厢运动过程中,陀螺仪5实时检测电梯运行过程中的角度和位置变化,建立其各个方向与重力线之间的变化关系,形成运行电梯与重力线之间的映射关系,建立起以重力线为检测基准的虚拟基准。psd6感受到激光准直仪7发射的光线,确定轿厢1相对于虚拟重力线基准的水平移动情况。同时,光电测距仪4通过向导轨2垂直发射激光,准确获取测量
装置与导轨2之间的相对距离。陀螺仪5、psd6和光电测距仪4及其调理电路集成到一起安于安装基座上,其他线路、装置等均置于轿厢顶上,将陀螺仪5、psd6和光电测距仪4采集的数据通过数据采集卡处理,再根据陀螺仪5建立的重力线与电梯运动位姿的数学关系、利用d-h法建立的电梯与光电测距仪4之间的空间位置关系以及光电测距仪4对电梯导轨2的三个定位基准面测距获取的电梯导轨直线的误差值建立重力线虚拟基准与导轨实测直线度之间数学模型,便可测得导轨2的整体直线度形状。
[0069]
结合图2-4,本发明电梯导轨直线度的误差补偿方法包括:
[0070]
(1)导轨顶面的载荷分布情况具有明显的规律性
[0071]
因为轿厢在运行过程中,两个导靴与导轨直接接触,因电梯晃动、风动以及导轨安装间隙等原因产生的力由导靴传递到导轨上。若上方导轨移动到某一位置,对应位置的力传感器测得的力的大小接近,这种情况下认为两个等间距随轿厢平行移动的力对电梯导轨持续作用使导轨产生变形。将导轨简化为简支梁模型,p1、p2是上下两个导靴传递给导轨的力,这两个力始终等间距地随着轿厢移动而平移。h为两个力之间的距离,为p1至导轨底端的距离。
[0072]
简支梁的位移几何边界条件为
[0073][0074]
根据梁的弯曲理论和弯矩边界条件,可得
[0075][0076]
假设根据(1)、(2)可得
[0077][0078]
设导轨变形的挠曲线方程为
[0079][0080]
梁的总势能由弹性应变能q和荷载势能q
p
组成。若梁的弹性模量为e,截面模量为i,则
[0081][0082][0083]
其中,
[0084]
梁的总势能s=q+q
p
,根据最小势能原理,令可得
[0085]
[0086]
在本检测系统中,导轨变形对直线度检测的影响取决于激光测距仪的位置,即将其代入(7)式,再将结果代入(4)式,可得第一种情况下导轨变形的挠曲线方程为
[0087][0088]
(2)导轨顶面载荷呈随机性分布
[0089]
所述导轨顶面载荷呈随机性分布的情况下,为了尽可能接近导轨在电梯运行过程中的真实受力情况,动态连续捕捉导轨的变形挠度,将力传感器布置在导轨顶面测量,导轨的长度为l m,每隔布置一个传感器,一共布置n+1个,这样,导轨受到的力可以以离散力的形式表现出来,由于轿厢是通过上下方共四个导靴在导轨上移动的,导靴不能滑出导轨,而检测装置通过基座安装在轿厢底部,检测装置与导靴之间的距离决定了有一部分导轨的是无法测量的。同时,导轨直线度的测量过程是随着轿厢自下而上测量,若导靴与光电测距仪之间的距离为那么根据轿厢连续移动过程中导靴的位置,采用瞬时记录的方法,获得导轨在单次连续测量过程中n-1次采集的n+1个位置共n
2-1个载荷数据。将n+1个位置的n-1次测量值取平均值表示该坐标的受力情况,然后将n+1个位置的载荷离散点绘制成散点图,并用五次多项式将其拟合,得到的载荷-位置分布曲线方程如下:
[0090]
y=a0+a1x+a2x2+a3x3+a4x4+a5x5ꢀꢀ
(9)
[0091]
虽然导轨在电梯运行过程中的受力情况是随机的、不均匀的、离散的,但是通过等间距的力来描述整个导轨的受力情况,每一点的力可认为是集中力。
[0092]
对于集中力,简支梁距离原点o为x的任意位置挠度表示为:
[0093][0094]
其中:e为弹性模量,f为集中载荷,a为集中力距离简支梁左端支点的距离,b为集中力距离简支梁右端支点的距离,l为导轨长度,i为截面模量,ei为简支梁的刚度。
[0095]
由力矩的定义可知,将(9)式在导轨长度l上积分即为导轨所受的力对于简支梁左端点a的力矩。假设集中力位于处。将力矩除以即可得到集中力p。
[0096]
以此集中力p代替分布在导轨顶面上的载荷,以求取导轨在顶面方向的变形挠度。
[0097][0098]
将p,带入式(10),得到本次实验的挠曲线方程
[0099][0100]
获得了导轨变形的挠曲线方程后,利用端点连线法求取导轨变形的挠度数据值,将同样用端点连线法处理的直线度形状曲线获得的直线度数值减去挠度数据值,即为补偿后的导轨直线度数据。该补偿方法经验证显著提高了检测系统的检测精度。本发明与目前的测量方法相比较,基于虚拟重力线技术实现了全段导轨的测量,并通过建立的误差补偿模型分析了导轨在两种不同受力情况下的补偿方法。本发明一方面可以精确测量已经安装好了的电梯全程导轨的直线度,给电梯安装公司提供科学的测量手段;另一方面,也可以检测各类在用电梯导轨直线度,准确获知电梯导轨变形情况,提前消除电梯安全隐患。
[0101]
以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1