一种基于来袭光束的目标物方位测量方法和装置与流程
1.本发明涉及视觉技术领域,具体涉及一种基于来袭光束的目标物方位测量方法和装置。
背景技术:
2.激光告警技术是一种用于截获、测量、识别来袭激光威胁信号并实时告警的光电被动侦察技术。随着激光精确制导武器在战场上的惊人表现,激光告警技术越来越受到各国重视,已经成为现代电子战的重要组成部分。激光告警设备通常装备在飞机、舰船、坦克以及其它地面固定目标上,实时监测所保护目标周围的光环境,及时发现并识别来袭的激光测距机、目标指示器、激光制导武器等激光威胁信号,确定激光来袭方位并发出告警信息,引导防护系统采取相应的对抗手段,保护作战平台,提高战场生存能力。
3.激光告警信息是激光告警器对来袭激光威胁源详细信息的提取识别结果。在实战应用中,仅仅探测到激光威胁信号的存在远远不够,通常需要根据作战任务要求获取更多的激光目标信息,以便决策系统根据激光信息判断敌我、威胁等级等,制定有效的防御策略。随着对抗手段的不断提高,对激光告警的信息量需求越来越多,对一些信息的精度要求越来越高。提高激光告警对激光威胁源的定位精度,一直是工程研究人员的重点研究方向之一。
4.实现激光威胁源的精确定向,目前比较成熟的技术方案主要有成像探测技术和编码探测技术,成像探测技术由于需要采用超高帧频ccd器件,在国内的应用受到限制;而编码探测技术的主要缺点在于对激光威胁源的定向精度较差。
5.本发明提供一种激光精确动态测量装置,该测量装置能够动态接收导向光束,并利用光束的特性来精确定位激光来源及移动方向。精度高、处理速度快,能够实时反馈来袭激光信息。
技术实现要素:
6.基于此,本发明的目的在于提供一种基于来袭光束的目标物方位测量方法和装置,通过对来袭光束的投影束斑坐标进行视觉测量来确定目标物方位,提升战争环境下对敌方小型隐蔽武器的侦查力。
7.为了实现上述目的,本发明采用以下技术方案:
8.一种基于来袭光束的目标物方位测量方法,使用一种测量主体和准直光源,所述测量主体固定安装在受保护平台上,其具体步骤包括:启动测量主体校准模式,使用准直光源垂直于所述测量主体的投屏发出准直光束,使所述准直光束在所述投屏上形成标参光斑,标记所述标参光斑的位置作为初始坐标;启动测量主体工作模式,使用视觉设备监测所述投屏,当所述视觉设备发现投屏上有来袭光斑,记录来袭光斑持续时间,若所述持续时间超过临界时间值,测量来袭光斑位置作为动态坐标;若持续时间未超过临界时间,所述视觉设备继续监测所述投屏;根据来袭光斑的动态坐标和标参光斑的初始坐标,解算目标物相
对于所述受保护平台的方位;其中,所述来袭光斑由所述目标物发出的来袭光束入射所述测量主体形成;所述标参光斑和所述来袭光斑均包括第一束斑和第二束斑;所述第一束斑为入射测量主体的光束经分束镜透射至所述投屏形成;所述第二束斑为入射测量主体的光束经分束镜反射,再经反射镜反射至所述投屏形成;所述临界时间由所述测量主体设定。
9.具体地,将所述分束镜与所述投屏呈夹角45
°
放置,将所述分束镜与所述反射镜平行设置。
10.进一步地,所述标记所述标参光斑位置方法包括:在所述投屏上建立二维标靶坐标系;标定视觉设备的内外参数;使用所述视觉设备测量所述标参光斑的第一束斑和第二束斑在所述标靶坐标系的位置坐标。
11.本发明还提供一种基于来袭光束的目标物方位测量装置,该测量装置包括准直光源和测量主体;所述准直光源,用于发出准直光束以校准所述测量主体;所述测量主体固定安装在受保护平台,所述测量主体包括校准模式和工作模式两种状态,所述测量主体用于接收准直光束或来袭光束并计算发出所述来袭光束的目标物的方位;所述测量主体包括底座、分束镜、反射镜、投屏、视觉设备和信息处理单元;所述底座与所述受保护平台固定连接,所述分束镜、反射镜、投屏和视觉设备固定在所述底座上,所述信息处理单元与所述视觉设备电性连接;所述分束镜与所述反射镜平行设置;入射光束经所述分束镜透射至所述投屏形成第一束斑;所述入射光束经所述分束镜反射,再经所述反射镜反射,至所述投屏形成第二束斑;
12.所述视觉设备,为单目视觉设备或多目视觉设备,当所述测量主体在校准模式时,所述视觉设备用于测量标参光斑在所述投屏上的位置坐标并输出给所述信息处理单元,当所述测量主体在工作模式时,所述视觉设备用于监测所述投屏,判断所述投屏上的来袭光斑的持续时间,若所述持续时间大于临界时间值,所述视觉设备测量来袭光斑在所述投屏上的二维坐标并输出给信息处理单元,否则,所述视觉设备继续监测所述投屏;
13.所述信息处理单元用于接收并存储标参光斑和来袭光斑的坐标数据并计算所述目标物相对于所述受保护平台的方位。
14.优选地,所述分束镜与所述投屏夹角为45
°
。
15.优选地,所述测量主体还包括壳体,所述壳体固定于所述底座上,所述壳体设有入射孔,所述入射孔用于接收入射光束。
16.本发明采用上述技术方案达到的有益效果是:
17.通过视觉技术测量来袭光斑相对标参光斑的二维坐标位置变化,解算来袭光束的立体方位,本发明提供的测量装置结构简单,装配灵活,可以将一个或多个该装置安装在坦克、武装车辆以及其它受保护平台上,该装置能够快速准确获取发出来袭光束的目标物的方位,提升对敌方小型隐蔽武器的侦查力和受保护平台的抗打击力。
附图说明
18.图1为本发明提供的基于来袭光束的目标物方位测量方法流程图;
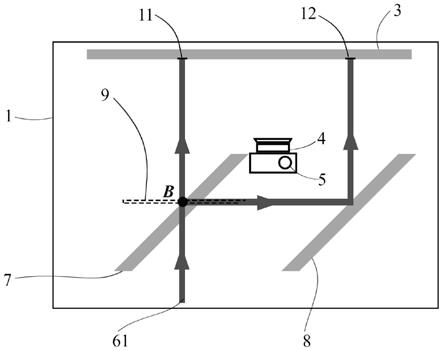
19.图2为本发明实施例的单目视觉的测量主体结构示意图;
20.图3为本发明的标参光斑和来袭光斑的坐标示意图。
21.图中各标号表示:
22.1、底座;3、投屏;4、视觉设备;5、信息处理单元;61、准直光束;62、来袭光束;7、分束镜;8、反射镜;9、基准面;10、虚拟基准点投影;11、第一束斑;12、第二束斑。
具体实施方式
23.为了使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例对本发明的具体实施方式作进一步详细描述。应该理解,此处所描述的实施例仅用于解释本发明,但不用于限制本发明的范围。
24.如图1为本发明提供的基于准直光束62的目标物方位测量方法流程图,一种基于准直光束62的目标物方位测量方法,该方法包括:
25.s1:启动测量主体校准模式,使用准直光源垂直于所述测量主体的投屏3发出准直光束61,使所述准直光束61在所述投屏3上形成标参光斑,标记标参光斑的位置作为初始坐标,标记方法具体包括:在所述投屏3上建立二维标靶坐标系;标定视觉设备4的内外参数;使用所述视觉设备4测量所述标参光斑的第一束斑11和第二束斑12在所述标靶坐标系的位置坐标。
26.s2:启动测量主体工作模式,视觉设备4监测所述投屏3。
27.s3:当发现投屏3上有来袭光斑,记录来袭光斑持续时间,若所述持续时间超过临界时间值,执行s4;若持续时间未超过临界时间,返回s2。
28.s4:使用视觉设备4测量来袭光斑位置作为动态坐标,根据来袭光斑的动态坐标和标参光斑的初始坐标,解算目标物相对于所述受保护平台的方位。
29.下面以本发明提供的具体装置为例,详细说明使用本发明提供的测量装置实现目标物方位的测量方法。
30.本发明实施例提供一种采用单目视觉的准直光束62目标物方位测量装置,包括:准直光源和测量主体,该测量主体固定安装在受保护平台,用于接收准直光束61或准直光束62并计算发出准直光束62的目标物的方位;请参阅图2,图2为本发明实施例的单目视觉的测量主体结构示意图,由图可知,测量主体包括底座1、分束镜7、反射镜8、投屏3、视觉设备4和信息处理单元5;底座1与受保护平台固定连接,分束镜7、反射镜8、投屏3和视觉设备4固定在底座1上,信息处理单元5与视觉设备4电性连接;
31.该实施例中,分束镜7与反射镜8平行设置,且均与投屏3呈夹角为45
°
设置,在其他实施例中,该角度可以为其他角度。目标物发出的准直光束62入射测量主体形成来袭光斑;标参光斑和来袭光斑均包括第一束斑11和第二束斑12;第一束斑11为入射测量主体的光束经分束镜7透射至投屏3形成;第二束斑12为入射测量主体的光束经分束镜7反射,再经反射镜8反射至投屏3形成;
32.该实施例中,采用单目视觉拍摄第一束斑11和第二束斑12,记录准直光束61和准直光束62在投屏3上的二维坐标,输出数据至信息处理单元5,解算目标物方位的具体步骤如下:
33.以分束镜7与投屏3交线的平行方向为y轴方向,以投屏3的法线方向为z轴,以投屏3上任一点为原点如图3所示建立标靶坐标系o-xyz。校准模式下,假设准直光束61的第一束斑11初始位置n1和第二束斑12初始位置n2在标靶坐标系oxy平面的坐标分别为(x1,y1)和(x2,y2),n1与n2的距离设为d。准直光束61与分束镜7的交点设为基准点b,过基准点b平行于
投屏3的平面设为基准面9,基准面9与投屏3的垂直距离设为d1。基准点b在标靶坐标系oxy平面的投影坐标为(x0,y0)。在测量主体的工作模式下,准直光束62与基准面9的交点设为虚拟基准点b
′
,虚拟基准点投影10坐标为(x
′0,y
′0),准直光束62的第一束斑11位置n1
′
和准直光束62的第二束斑12位置n2
′
的坐标分别为(x
′1,y
′1)和(x
′2,y
′2),假设准直光束62相对于标靶坐标系z轴的偏转方位为则由三角几何关系,对准直光束62和准直光束61的第一束斑11有
[0034][0035]
同理,对准直光束62和准直光束61第二束斑12有
[0036][0037]
其中δx
i
=x
′
i-x
i
,δy
i
=y
′
i-y
i
,(i=0,1,2)。长距离d=d+d1。(1)式与(2)式结合,并利用准直光束61的第一束斑11和第二束斑12之间的关系,可以得到准直光束62相对于测量主体的偏转方位:
[0038][0039]
其中,另外,如果选择适当的基准点b,使d=d1时,可以得到虚拟平移量为:
[0040][0041]
从以上推导可以看出,通过测量准直光束62与准直光束61的光斑二维坐标的变化,获取准直光束62相对于测量主体的方位,包括平移量和偏转角。且通过增大接收屏分辨率、亚像素提取等手段提高光斑坐标读数的提取精度,可以对细微的准直光束62偏转角度进行感知。
[0042]
该实施例中,解算发射准直光束62的目标物相对被保护平台的方位,具体步骤如下:
[0043]
以准直光束61为z轴建立世界坐标系,则其光矢量可表示为向量v0=(0,0,1)。当检测到准直光束62,假设准直光束62相对于世界坐标系发生角度偏转则准直光束62在标靶坐标系中的光矢量方向为:根据rodriguez旋转公式,可知v0到v1的旋转矩阵为
[0044][0045]
对应于在世界坐标系下用欧拉角表示的旋转矩阵,可求解出目标物相对于世界坐标系的角度偏转的欧拉表达式:
[0046][0047]
本发明提供的另一个实施例,测量主体还包括壳体,壳体固定于底座1上,壳体设有入射孔,入射孔用于接收入射光束。
[0048]
本发明实施例可以自动截获、定向、分析和储存各种侦察到的信号,以便详细、快速查明对方光电辐射源的性质和位置,并选择最佳干扰方式,引导施放干扰或实施对抗动作。
[0049]
在高分辨率投屏3和视觉相机的应用下,假设投屏3分辨率为千万像素,在图像处理技术辅助下,投影光斑中心提取精度能够达到亚像素级,如0.1像素,则光束在小范围内的微小移动和偏转角度能够被准确定量测量。光束偏转角度测量精度最高能够达到10角秒以内,光斑位移测量精度可达10微米以内。
[0050]
结合计算机图像处理技术,激光光斑中心提点算法能够被写入嵌入式设备中,大大提升了光斑偏移距离的计算速度,从而快速计算入射光束的平移量、偏转角度。测量速度能够达到500hz~1000hz。
[0051]
最后所应说明的是,以上具体实施方式仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1