光学传感器的姿态调整装置及方法、自动物料运输系统与流程
1.本发明实施例涉及光学检测技术领域,尤其涉及一种光学传感器的姿态调整装置及方法、自动物料运输系统。
背景技术:
2.随着科技的发展,自动化技术逐渐应用于各行各业,尤其是在制造业中具有广泛的应用。例如自动物料运输系统能够将物料由上料口运输至下料口,以节省人力运输成本。
3.自动物料运输系统通常包括多台物料运输车,且物料运输车能够在相应的轨道中行驶,以使该物料运输车能够将相应的物料运输至该物料的目的地。通常会在物料运输车上设置障碍物检测光学传感器,以使物料运输车能够在轨道上行驶的过程中对前方的障碍物和其它物料运输车进行检测,以免发生碰撞。为确保设置在物料运输车上的障碍物检测光学传感器能够对障碍物和/或其它物料运输车进行准确检测,需要在将物料运输车投入使用前,调整该物料运输车上障碍物检测光学传感器的姿态。现有技术中,通常采用相应的检测装置进行检测后,以人工手动加垫片的方式调整物料运输车上障碍物检测光学传感器的姿态,如此会具有较高的人力成本,且调整效率低。
技术实现要素:
4.针对上述存在问题,本发明实施例提供一种光学传感器的姿态调整装置及方法、自动物料运输系统,以能够自动对光学传感器的姿态进行调整,降低人力成本,提高光学传感器姿态调整效率。
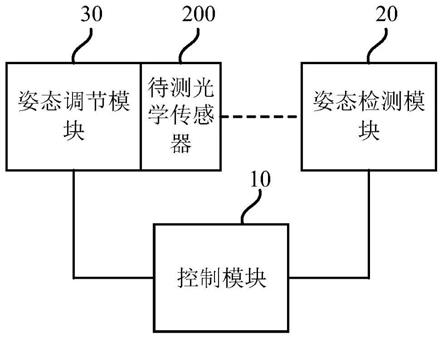
5.第一方面,本发明实施例提供了一种光学传感器的姿态调整装置,包括:控制模块、姿态检测模块和姿态调节模块;所述待测光学传感器固定于所述姿态调节模块上;
6.所述姿态检测模块用于接收待测光学传感器的发射光束,并根据所述发射光束检测所述待测光学传感器的姿态,发送姿态信息至所述控制模块;
7.所述控制模块用于根据所述姿态信息,控制所述姿态调节模块对所述待测光学传感器进行姿态调整。
8.第二方面,本发明实施例还提供了一种光学传感器的姿态调整方法,应用于上述光学传感器的姿态调整装置,包括:
9.所述姿态检测模块接收待测光学传感器的发射光束,并根据所述发射光束检测所述待测光学传感器的姿态,发送姿态信息;
10.所述控制模块根据所述姿态信息,控制所述姿态调节模块对所述待测光学传感器进行姿态调整。
11.第三方面,本发明实施例还提供了一种自动物料运输系统,包括:多个物料运输车和上述光学传感器的姿态调整装置;
12.每个所述物料运输车包括车体和通过所述姿态调整装置固定于所述车体上的光学传感器。
13.本发明实施例提供的光学传感器的姿态调整装置及方法、自动物料运输系统,通过姿态检测模块接收待测光学传感器的发射光束,并根据该发射光束发送姿态信息至控制模块,使得控制模块能够根据该姿态信息控制姿态调节模块对待测光学传感器进行姿态调整,以能够通过待测光学传感器的发射光束检测该待测光学传感器的当前姿态,并由该待测光学传感器的当前姿态,控制姿态调节模块对其进行姿态调整,直至该待测光学传感器的姿态为预设姿态,从而无需人工操作,即可自动调整待测光学传感器的姿态,有利于降低人力成本,提高姿态调整效率,同时通过闭环检测控制的方式,能够提高姿态调整的准确度,进而能够确保自动物料运输系统能够稳定运行。
附图说明
14.图1是本发明实施例提供的一种光学传感器的姿态调整装置的结构示意图;
15.图2是本发明实施例提供的一种姿态检测模块的光束接收区的结构示意图;
16.图3是本发明实施例提供的又一种光学传感器的姿态调整装置的结构示意图;
17.图4是本发明实施例提供的一种姿态调节模块的立体结构示意图;
18.图5是图4中姿态调节模块的一种主视结构示意图;
19.图6是图4中姿态调节模块的一种侧视结构示意图;
20.图7是本发明实施例提供的一种压电调节螺栓的结构示意图;
21.图8是本发明实施例提供的一种压电堆的等效电路结构示意图;
22.图9是本发明实施例提供的一种压电调节螺栓变长的时序图;
23.图10是本发明实施例提供的一种压电调节螺栓变短的时序图;
24.图11是本发明实施例提供的又一种光学传感器的姿态调整装置的结构示意图;
25.图12是本发明实施例提供的一种光学传感器的姿态调整方法的流程图;
26.图13是本发明实施例提供的一种对光学传感器进行姿态调节的具体流程图;
27.图14是本发明实施例提供的一种自动物料运输系统的结构框图;
28.图15是本发明实施例提供的自动物料运输系统的结构示意图。
具体实施方式
29.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
30.本发明实施例提供了一种光学传感器的姿态调整装置,该姿态调整装置能够自动调整光学传感器的姿态,以使光学传感器能够具有可靠的检测范围。图1是本发明实施例提供的一种光学传感器的姿态调整装置的结构示意图。如图1所示,该光学传感器的姿态调整装置包括控制模块10、姿态检测模块20和姿态调节模块30;其中,待测光学传感器200固定于姿态调节模块30上;姿态检测模块20能够接收待测光学传感器200的发射光束,并根据该发射光束检测待测光学传感器的姿态,发送姿态信息至控制模块10;该控制模块能够根据相应的姿态信息,控制姿态调节模块30对待测光学传感器200进行姿态调整。
31.具体的,光学传感器能够依据光学原理进行测距,以实现非接触、非破坏性测量,即光学传感器发出相应的发射光束,该发射光束在遇到障碍物时会返回至光学传感器,使
得光学传感器能够根据发射光束与接收光束之间的间隔时间以及光在介质中的传播速度,确定出该光学传感器所在位置与障碍物之间的距离;且在光学传感器的姿态发生变化时,该光学传感器发出的发射光线的传播方向随之改变,从而会影响光学传感器的检测范围,以及影响光学传感器对特定方向的障碍物的检测准确度。因此,当采用光学传感器对特定方向的障碍物进行检测时,需要检测并调整该光学传感器的姿态。
32.本发明实施例通过姿态检测模块20接收待测光学传感器200出射的发射光束,以检测该待测光学传感器200的姿态,该姿态例如可以为待测光学传感器200的当前位置以及该待测光学传感器200出射的发射光束的传播方向;其中,可在姿态检测模块20中设置有相应的反光板,若待测光学传感器200出射的发生光束打在姿态检测模块20的反光板上,则会有相应的反射光返回至待测光学传感器200中,可获知当前待测光学传感器200的姿态在预设姿态范围内;而当待测光学传感器200出射的发生光束未打在姿态检测模块20的反光板上时,可获知当前待测光学传感器200的姿态未在预设姿态范围内;此时,可将待测光学传感器200出射的发生光束是否打在姿态检测模块20的反光板上的状态作为姿态信息,并将该姿态信息反馈至控制模块10中。控制模块10能够根据该姿态信息控制姿态调节模块30调整该待测光学传感器200的姿态;其中,姿态调节模块30能够在控制模块10的控制下,带动待测光学传感器200沿某一方向移动,或者带动待测光学传感器200沿某个旋转轴旋转,以改变待测光学传感器200的姿态,使得待测光学传感器200发出的发射光线能够沿特定方向传播。相应的,在控制模块10控制姿态调节模块30对待测光学传感器200进行姿态调整过程中,姿态检测模块20会实时接收该待测光学传感器200发出的发射光束,并实时向控制模块10发送姿态信息,直至控制模块10根据姿态检测模块20发送的姿态信息获知待测光学传感器200的当前姿态为预设姿态时,控制模块10会控制姿态调节模块30停止对待测光学传感器200进行姿态调整。
33.示例性的,图2是本发明实施例提供的一种姿态检测模块的光束接收区的结构示意图。结合图1和图2所示,姿态检测模块20可以包括一光束接收区201,该光束接收区201设置有姿态检测刻度,该姿态检测刻度的检测范围例如可以为[+5,-5];此时,待测光学传感器200的发射光束能够传播至姿态检测模块20的光束接收区201,且待测光学传感器200的姿态不同,该待测光学传感200的发射光束在姿态检测模块20的光束接收区201的位置不同,使得姿态检测模块20能够根据待测光学传感200的发射光束在光束接收区201的位置,确定出该待测光学传感器200的发射光束在光束接收区201的姿态检测刻度值,并生成相应的姿态信息,即姿态检测模块20能够根据待测光学传感器200发送的发射光束在光束接收区201的位置,生成姿态信息;当控制模块10获取到姿态检测模块20的姿态信息时,该控制模块10能够根据该姿态信息,确定待测光学传感器200的发射光束在光束接收区201的姿态检测刻度值,并当该姿态检测刻度值未在预设姿态检测刻度范围内时,能够根据该姿态检测刻度值控制姿态调节模块30对待测光学传感器200进行姿态调整;或者在所确定的姿态检测刻度值在预设姿态检测刻度范围内时,控制模块10会控制姿态调节模块30停止对待测光学传感器200的进行姿态调整。
[0034]
例如以预设姿态检测刻度范围为[-1,1]为例。如图2所示,当待测光学传感器200的发射光束m1打在光束接收区201的姿态检测刻度值2与3之间时,控制模块10在接收到该姿态信息时,会控制姿态调节模块30带动待测光学传感器200沿某一方向指向运动;直至当
待测光学传感器200的发射光束m2打在光束接收区201的姿态检测刻度值0与1之间时,控制模块10根据姿态信息可获知该待测光学传感器200在光束接收区201的姿态检测刻度值在预设姿态检测刻度范围内;此时,控制模块10会控制姿态调节模块30停止对待测光学传感器200的姿态调整。
[0035]
如此,本发明实施例通过姿态检测装置实时获取待测光学传感器的发射光束,并根据该发射光束发送姿态信息至控制模块,以使控制模块能够根据该姿态信息控制姿态调节模块将待测光学传感器的姿态调制至预设姿态,从而能够自动调节待测光学传感器的姿态,节省人力,提高调整效率;同时,将待测光学传感器调整至预设姿态后,能够提高待测光学传感器的检测准确度。
[0036]
可选的,图3是本发明实施例提供的又一种光学传感器的姿态调整装置的结构示意图。如图3所示,在上述实施例的基础上,待测光学传感器的姿态调整装置还包括电源模块40;该电源模块40可电连接于控制模块10和姿态调节模块30之间。电源模块40能够在控制模块30的控制下为姿态调节模块30提供供电电源。
[0037]
示例性的,电源模块40中可设置有电源和开关单元,控制模块10能够控制开关单元导通与断开;即控制模块10在控制开关单元导通时,电源通过导通的开关单元与姿态调节模块30导通,使得电源能够为姿态调节模块30提供供电电源,姿态调节模块30能够带动待测光学传感器200移动,以调节待测光学传感器200的姿态;而当控制模块10控制开关单元断开时,电源无法与姿态调节模块30导通,电源无法为姿态调节模块30提供供电电源,使得姿态调节模块30无法工作,此时姿态调节模块30无法带动待测光学传感器200运动,即姿态调节模块30停止对待测光学传感器200进行姿态调节。如此,通过在控制模块10与姿态调节模块30之间电连接电源模块40,通过控制模块10控制电源模块40为姿态调节模块30提供供电电源或停止为姿态调节模块30提供供电电源,从而达到对姿态调节模块30进行控制的目的。
[0038]
可选的,继续参考图3,姿态调节模块30可以包括活动支架、固定支架和多个压电调节螺栓;其中,待测光学传感器200可固定于姿态调节模块30的固定支架上,且活动支架通过压电调节螺栓与固定支架连接;控制模块10能够根据姿态检测模块20发送的姿态信息,控制电源模块10为各压电调节螺栓提供供电电源,调节压电调节螺栓的长度,以调整待测光学传感器的姿态。
[0039]
具体的,压电调节螺栓可以为设置有压电调节结构的螺栓,该压电调节结构例如可以为压电堆,该压电堆中可堆叠设置压电陶瓷片。通过向压电堆施加供电电源,使得该压电堆中的压电陶瓷片发生形变,且在停止向压电堆提供供电电源时,该压电堆中的压电陶瓷片会回复原状,以达到调节压电调节螺栓的长度的目的。
[0040]
示例性的,图4是本发明实施例提供的一种姿态调节模块的立体结构示意图,图5是图4中姿态调节模块的一种主视结构示意图,图6是图4中姿态调节模块的一种侧视结构示意图。结合图3、图4、图5和图6所示,姿态调节模块30的活动支架可以包括第一活动板311、第二活动板312和第三活动板313;而多个压电调节螺栓可以包括第一压电调节螺栓331、第二压电调节螺栓332、第三压电调节螺栓333、第四压电调节螺栓334、第五压电调节螺栓335、第六压电调节螺栓336、第七压电调节螺栓337和第八压电调节螺栓338;其中,第一活动板311和第二活动板312位于待测光学传感器200相对的两侧;且第一活动板311通过
第一压电调节螺栓331和第二压电调节螺栓332与固定支架32连接;第二活动板312通过第三压电调节螺栓333和第四压电调节螺栓334与固定支架32连接;第三活动板313通过第五压电调节螺栓335和第六压电调节螺栓336与第一活动板311连接;第三活动板313还通过第七压电调节螺栓337和第八压电调节螺栓338与第二活动板312连接。
[0041]
其中,当同时将第五压电调节螺栓335、第六压电调节螺栓336、第七压电调节螺栓337和第八压电调节螺栓338的长度变长时,可使固定支架32带动待测光学传感器200沿第一直线方向z的负向移动;而当同时将第五压电调节螺栓335、第六压电调节螺栓336、第七压电调节螺栓337和第八压电调节螺栓338的长度变短时,可使固定支架32带动待测光学传感器200沿第一直线方向z的正向移动;当将第一压电调节螺栓331和第二压电调节螺栓332的长度变长,以及同时将第三压电调节螺栓333和第四压电调节螺栓334的长度变短时,可使固定支架32带动待测光学传感器200沿第二直线方向x的正向移动;而当第一压电调节螺栓331和第二压电调节螺栓332的长度变短,以及同时将第三压电调节螺栓333和第四压电调节螺栓334的长度变长时,可使固定支架32带动待测光学传感器200沿第二直线方向x的负向移动;当将第三压电调节螺栓333和第二压电调节螺栓332的长度变长,以及同时将第四压电调节螺栓334和第一压电调节螺栓的长度变短时,可使固定支架32带动待测光学传感器200以第一直线方向z为轴逆时针转动;而当将第三压电调节螺栓335和第二压电调节螺栓332的长度变短时,以及同时将第四压电调节螺栓334和第一压电调节螺栓的长度变长,可使固定支架32带动待测光学传感器200以第一直线方向z为轴顺时针转动;当将第八压电调节螺栓338和第六压电调节螺栓336的长度变长,以及同时将第七压电调节螺栓337和第五压电调节螺栓335的长度变短时,可使固定支架32带动待测光学传感器200以第二直线方向x为轴逆时针转动;而当将第八压电调节螺栓338和第六压电调节螺栓336的长度变短,以及同时将第七压电调节螺栓337和第五压电调节螺栓335的长度变长时,可使固定支架32带动待测光学传感器200以第二直线方向x为轴顺时针转动;当将第五压电调节螺栓335和第六压电调节螺栓336的长度变短,以及同时将第七压电调节螺栓337和第八压电调节螺栓338的长度变长,可使固定支架32带动待测光学传感器200以第三直线方向y为轴逆时针转动;而将第五压电调节螺栓335和第六压电调节螺栓336的长度变长,以及同时将第七压电调节螺栓337和第八压电调节螺栓338的长度变短,可使固定支架32带动待测光学传感器200以第三直线方向y为轴顺时针转动。
[0042]
如此,通过调节第一压电调节螺栓331、第二压电调节螺栓332、第三压电调节螺栓333、第四压电调节螺栓334、第五压电调节螺栓335、第六压电调节螺栓336、第七压电调节螺栓337和第八压电调节螺栓338的长度,使得固定支架32带动待测光学传感器200沿各个方向直线运动或转动,以达到调节待测光学传感器200的姿态的目的。
[0043]
可选的,图7是本发明实施例提供的一种压电调节螺栓的结构示意图。如图7所示,压电调节螺栓可以包括固定螺杆301、活动螺杆302以及驱动杆303;其中,驱动杆303的一端与活动螺杆302连接,驱动杆303的另一端活动设置于固定螺杆301内;固定螺杆301内还设置有第一夹持臂3014、第二夹持臂3015、第一压电堆3011、第二压电堆3012和第三压电堆3013,且第一压电堆3011、第三压电堆3013以及第二压电堆3012顺次排列,同时第二压电堆3012位于第三压电堆3013靠近活动螺杆302的一侧;该第一压电堆3011在未接收到供电电源时,控制第一夹持臂3014夹紧驱动杆303,以及在接收到供电电源时,控制第一夹持臂
3014松开驱动杆303,以使驱动杆303带动活动螺杆302发生位移或保持静止状态;第二压电堆3012在未接收到供电电源时,控制第二夹持臂3015夹紧驱动杆303,以及在接收到供电电源时控制第二夹持臂3015松开驱动杆303,以使驱动杆303带动活动螺杆302发生位移或保持静止状态;第三压电堆3013在接收到供电电源时,控制第一压电堆3011和/或第二压电堆3012发生位移,以使驱动杆303带动活动螺杆302发生位移或保持静止状态。其中,每个压电堆可以包括多个堆叠设置的压电陶瓷片。此外,压电调节螺栓还可以包括固定板305和螺母304,以使压电调节螺栓与活动支架的活动板固定连接;且在压电调节螺栓固定螺杆内还设置有弹簧垫片3016和3017,以为压电堆提供变形余量。
[0044]
示例性的,图8是本发明实施例提供的一种压电堆的等效电路结构示意图。结合图7和图8所示,设置于压电调节螺栓中固定螺杆301内的第一压电堆3011、第二压电堆3012和第三压电堆313中均可以包括多个压电陶瓷片3001和设置于压电陶瓷片两端的电极3003,即可以包括n(n≥1,且n为整数)个压电陶瓷片。电源模块40中可以包括电源41和开关42,当开关42断开时,电源41与压电堆组成的电路为断路状态,压电堆中的压电陶瓷片3001保持原有的状态;而当开关闭合时,电源41与压电堆形成回路,压电堆中的压电陶瓷片3001发生形变(发生形变后的状态例如可以为附图标记3002),相应的压电陶瓷片两端的电极3003也为随之发生位移(电极3003位移后为3004),以此能够使压电堆变长;而当开关42再次断开时,压电陶瓷片会恢复原状。
[0045]
示例性的,图9是本发明实施例提供的一种压电调节螺栓变长的时序图,图10是本发明实施例提供的一种压电调节螺栓变短的时序图。结合图7和图9所示,压电调节螺栓变长的过程包括第一伸长阶段t1、第二伸长阶段t2、第三伸长阶段t3、第四伸长阶段t4和第五伸长阶段t5。在第一伸长阶段t1,向第一压电堆3011提供供电电源,控制第一压电堆3011中的压电陶瓷片变形,使得第一压电堆3011整体伸长,第一夹持臂3014松开对驱动杆303的夹持;在第二伸长阶段t2,继续保持向第一压电堆3011提供供电电源,同时向第三压电堆3013提供供电电源,第三压电堆3013中的压电陶瓷片发生形变,使得第三压电堆3013整体伸长,第三压电堆3013会挤压第二压电堆3012左移,由于此时还未向第二压电堆3012提供供电电源,因此第二压电堆3012会控制第二夹持臂3015夹紧驱动杆303,使得第二压电堆3012左移的同时带动驱动杆303一起左移,驱动杆303会带动活动螺杆302左移,使得压电调节螺栓变长;在第三伸长阶段t3,保持向第三压电堆3013提供供电电源,停止向第一压电堆3011提供供电电源,同时向第二压电堆3012提供供电电源,第一压电堆3011逐渐恢复原状,第一夹持臂3014逐渐夹紧驱动杆303,第二压电堆3012中的压电陶瓷片发生形变,使得第二压电堆3012整体伸长,第二夹持臂3015逐渐松开对驱动杆303的夹持,且在第二压电堆3012伸长时,会挤压第三压电堆3013向第一压电堆3011的方向移动;在第四伸长阶段t4,保持向第二压电堆3012提供供电电源,同时停止向第三压电堆3013提供供电电源,使得第三压电堆3013恢复原状,同时第二压电堆3012向第三压电堆3013的一侧移动;在第五伸长阶段t5,停止向第二压电堆3012提供供电电源,使得第二压电堆3012恢复原状,并控制第二夹持臂3015夹紧驱动杆303,此时第二夹持臂3015的夹紧位置右移,使得压电调节螺栓保持伸长状态。
[0046]
结合图7和图10所示,压电调节螺栓变短的过程包括第一缩短阶段t1'、第二缩短阶段t2'、第三缩短阶段t3'、第四缩短阶段t4'和第五缩短阶段t5'。在第一缩短阶段t1',向
第二压电堆3012提供供电电源,使得第二压电堆3012中压电陶瓷片发生形变,第二压电堆3012的长度整体伸长,第二夹持臂3015松开对驱动杆303的夹持;在第二缩短阶段t2',保持向第二压电堆3012提供供电电源,同时向第三压电堆3013提供供电电源,使得第三压电堆3013中的压电陶瓷片发生形变,第三压电堆3013整体伸长,并挤压第一压电堆3011右移,由于此时未向第一压电堆3011提供供电电源,因此第一压电堆3011会控制第一夹持臂3014夹紧驱动杆303,使得第一压电堆3011右移的同时带动驱动杆303一起右移,驱动杆303会带动活动螺杆302右移,使得压电调节螺栓变短;在三缩短阶段t3',保持向第三压电堆3013提供供电电源,停止向第二压电堆3012提供供电电源,同时向第一压电堆3011提供供电电源,使得第二压电堆3012逐渐恢复原状,第二夹持臂3015逐渐夹紧驱动杆303,且第二夹持臂3015的夹紧位置左移,第一压电堆3011中的压电陶瓷片发生形变,使得第一压电堆3011整体伸长,第一夹持臂3011逐渐松开对驱动杆303的夹持;在第四缩短阶段t4',保持向第一压电堆3011提供供电电源,同时停止向第三压电堆3013提供供电电源,使得第三压电堆3013恢复原状,同时第一压电堆3011向第三压电堆3013的一侧移动;在第五伸长阶段t5,停止向第一压电堆3011提供供电电源,使得第一压电堆3011恢复原状,并控制第一夹持臂3014夹紧驱动杆303,此时第一夹持臂3011的夹紧位置左移,使得压电调节螺栓保持缩短状态。
[0047]
如此,分阶段控制压电调节螺栓中各压电堆伸长或缩短,能够实现对压电调节螺栓长度的调节,且在停止向压电调节螺栓中各压电堆提供供电电源时,还能够使压电调节螺栓保持伸长或缩短的状态,有利于降低姿态调整装置的功耗,达到节能的效果。
[0048]
可选的,图11是本发明实施例提供的又一种光学传感器的姿态调整装置的结构示意图。如图11所示,在上述实施例的基础上,该光学传感器的姿态调整装置还包括增益模块50;该增益模块50电连接于控制模块10和姿态检测模块20之间;该增益模块50能够将姿态检测模块20发送的姿态信息进行信号放大后传输至控制模块10。如此,在姿态检测模块20与控制模块10之间电连接增益模块50,能够提高姿态检测模块20对待测光学传感器200的姿态检测精度,进一步提高光学传感器的姿态调整装置对待测光学传感器200的姿态调整准确度和精度。
[0049]
本发明实施例还提供一种光学传感器的姿态调整方法,该光学传感器的姿态调整方法可应用于本发明实施例提供的光学传感器的姿态调整装置,因此该光学传感器的姿态调整方法具备本发明实施例提供的光学传感器的姿态调整装置的有益效果,相同之处可参照上述对本发明实施例提供的光学传感器的姿态调整装置的描述,在此不再赘述。图12是本发明实施例提供的一种光学传感器的姿态调整方法的流程图。如图12所示,该姿态调整方法包括:
[0050]
s110、姿态检测模块接收待测光学传感器的发射光束,并根据发射光束检测待测光学传感器的姿态,发送姿态信息至控制模块;
[0051]
s120、控制模块根据姿态信息,控制姿态调节模块对待测光学传感器进行姿态调整。
[0052]
本发明实施例通过姿态检测模块接收待测光学传感器的发射光束,并根据该发射光束发送姿态信息至控制模块,使得控制模块能够根据该姿态信息控制姿态调节模块对待测光学传感器进行姿态调整,以能够通过待测光学传感器的发射光束检测该待测光学传感器的当前姿态,并由该待测光学传感器的当前姿态,控制姿态调节模块对其进行姿态调整,
直至该待测光学传感器的姿态为预设姿态,从而无需人工操作,即可自动调整待测光学传感器的姿态,有利于降低人力成本,提高姿态调整效率,同时通过闭环检测控制的方式,能够提高姿态调整的准确度,进而能够确保自动物料运输系统能够稳定运行。
[0053]
可选的,图13是本发明实施例提供的一种对光学传感器进行姿态调节的具体流程图。如图13所示,姿态调节模块包括活动支架、固定支架和多个压电调节螺栓,且待测光学传感器固定于固定支架上,活动支架通过压电调节螺栓与固定支架连接时,控制模块控制姿态调节模块对待测光学传感器进行姿态调节的具体方法为:
[0054]
s121、实时获取姿态检测模块发送的姿态信息;
[0055]
s122、根据该姿态信息,判断发射光束的姿态检测刻度值是否在预设姿态检测刻度范围内;若否,则执行s123;若是,则执行s124;
[0056]
s123、控制电源模块为姿态调节模块的压电调节螺栓提供供电电源,调节压电调节螺栓的长度,以使待测光学传感器在第一直线方向、第二直线方向、第一旋转方向、第二旋转方向以及第三旋转方向中的至少一个方向上发生位移;其中,第一直线方向与第二直线方向垂直,第三直线方向与沿第一直线方向延伸的直线和沿第二直线方向延伸的直线构成的平面垂直;第一旋转方向为以沿第一直线方向延伸的直线为轴的旋转方向;第二旋转方向为以沿第二直线方向延伸的直线为轴的旋转方向;第三旋转方向为以沿第三直线方向延伸的直线为轴的旋转方向;
[0057]
s124、控制电源模块停止为姿态调节模块的压电调节螺栓提供供电电源。
[0058]
本发明实施例中,姿态检测装置实时获取待测光学传感器的发射光束,并根据该发射光束发送姿态信息至控制模块,而控制模块通过实时获取姿态调整装置发送的姿态信息,并根据该姿态信息判断当前待测光学传感器的发射光束的位置是否在预设姿态检测刻度范围;并在待测光学传感器的发射光束的位置未在预设姿态检测刻度范围时,控制相应的压电调节螺栓的长度,实现对待测光学传感器的姿态调节,而在待测光学传感器的发射光束的位置在预设姿态检测刻度范围时,停止对待测光学传感器进行姿态调节,从而自动调节待测光学传感器的姿态,节省人力,提高调整效率;同时,将待测光学传感器调整至预设姿态后,能够提高待测光学传感器的检测准确度。
[0059]
可选的,压电调节螺栓包括固定螺杆、活动螺杆以及驱动杆,且驱动杆的一端与活动螺杆连接,驱动杆的另一端活动设置于固定螺杆内;固定螺杆内设置有第一夹持臂、第二夹持臂、第一压电堆、第二压电堆和第三压电堆;第一压电堆、第三压电堆以及第二压电堆顺次排列,且第二压电堆位于第三压电堆靠近活动螺杆的一侧,调节压电调节螺栓的长度包括第一伸长阶段、第二伸长阶段、第三伸长阶段、第四伸长阶段和第五伸长阶段。
[0060]
结合图7和图9所示,在第一伸长阶段t1,向第一压电堆3011提供供电电源,控制第一压电堆3011伸长,以使第一夹持臂3014松开驱动杆303,驱动杆303保持静止状态;在第二伸长阶段t2,向第三压电堆3013提供供电电源,控制第三压电堆3013向靠近第二压电堆3012的一侧伸长,以使第二压电堆3012带动驱动杆303向远离第一压电堆3011的一侧发生位移,驱动杆303带动活动螺杆302向远离固定螺杆301的一侧发生位移;在第三伸长阶段t3,停止向第一压电堆3011提供供电电源,以及向第二压电堆3012提供供电电源,控制第一压电堆3011缩短,以及控制第二压电堆3012向靠近第一压电堆3011的一侧伸长,以使第一夹持臂3014夹紧驱动杆303,第二夹持臂3015松开驱动杆303,驱动杆303保持静止状态;在
第四伸长阶段t4,停止向第三压电堆3013提供供电电源,控制第三压电堆3013向靠近第一压电堆3011的一侧缩短,以使第二压电堆3012向靠近第一压电堆3011的一侧发生位移,驱动杆保持静止状态;在第五伸长t5阶段,停止向第二压电堆3012提供供电电源,控制第二压电堆3012缩短,以使第二夹持臂3015夹紧驱动杆303,固定驱动杆303的位置。
[0061]
相应的,结合图7和图10所示,调节压电调节螺栓的长度还可以包括第一缩短阶段t1'、第二缩短阶段t2'、第三缩短阶段t3'、第四缩短阶段t4'和第五缩短阶段t5';在第一缩短阶段t1',向第二压电堆3012提供供电电源,控制第二压电堆3012伸长,以使第二夹持臂3015松开驱动杆302,驱动杆303保持静止状态;在第二缩短阶段t2',向第三压电堆3013提供供电电源,控制第三压电堆3013向靠近第一压电堆3011的一侧伸长,以使第一压电堆3011带动驱动杆303向远离第二压电堆3012的一侧发生位移,驱动杆303带动活动螺杆302向靠近固定螺杆301的一侧发生位移;在第三缩短阶段t3',停止向第二压电堆3012提供供电电源,以及向第一压电堆3011提供供电电源,控制第二压电堆3012缩短,以及控制第一压电堆3011向靠近第二压电堆3012的一侧伸长,以使第二夹持臂3015夹紧驱动杆303,第一夹持臂303松开驱动杆303,驱动杆303保持静止状态;在第四缩短阶段t4',停止向第三压电堆3013提供供电电源,控制第三压电堆3013向靠近第二压电堆3012的一侧缩短,以使第一压电堆3011向靠近第二压电堆3012的一侧发生位移,驱动杆303保持静止状态;在第五缩短阶段t5',停止向第一压电堆3011提供供电电源,控制第一压电堆3011缩短,以使第一夹持臂3014夹紧驱动杆303,固定驱动杆303的位置。
[0062]
如此,通过分阶段控制压电调节螺栓中各压电堆伸长或缩短,能够实现对压电调节螺栓长度的调节,且在停止向压电调节螺栓中各压电堆提供供电电源时,还能够使压电调节螺栓保持伸长或缩短的状态,有利于姿态调整装置的功耗,达到节能的效果。
[0063]
本发明实施例还提供一种自动物料运输系统,该自动物料运输系统包括多个物料运输车和本发明实施例提供的光学传感器的姿态调整装置,因此该自动物料运输系统也具备本发明实施例提供的光学传感器的姿态调整装置有益效果,相同之处可参照上述对光学传感器的姿态调整装置的描述,在此不再赘述。
[0064]
示例性的,图14是本发明实施例提供的一种自动物料运输系统的结构框图,图15是本发明实施例提供的自动物料运输系统的结构示意图。结合图14和图15所示,该自动物料运输系统多个物料运输车310和本发明实施例提供的光学传感器的姿态调整装置100。每个物料运输车包括车体3101和通过姿态调整装置30固定于车体3101上的光学传感器200,该光学传感器200即为待测光学传感器;姿态检测装置20能够接收该固定于车体上的光学传感器200的发射光束,并发送姿态信息至控制模块,以使控制模块控制姿态调节模块对光学传感器200的姿态进行调节,从而能够自动调节物料运输车中光学传感器200的姿态,提高自动调节物料运输车中光学传感器200检测准确度。
[0065]
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整、相互结合和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1