一种雷达及交通工具的制作方法
1.本技术涉及到通信技术领域,尤其涉及到一种雷达及交通工具。
背景技术:
2.随着物联网和5g的发展,自动驾驶成为了未来的发展趋势,现阶段自动驾驶主要分为5个等级,如图1所示,其中长距扫描雷达是l3以上的必要手段,测试距离可以达到200米以上,且精度很高。
3.针对现有的激光雷达,技术分类如下所示,现阶段以机械扫描为主,但是结构笨重,成本高,工艺繁琐。而驱动机构以尺寸小,工艺简单成为下一代雷达最有竞争力的方案。
4.mems雷达的核心扫描组件为mems(micro-electro-mechanical system,微机械系统)转镜,相对于传统的通信应用的mems,其通光面积,fov(field of view,视场角)及机械强度的要求都更为苛刻。从理论模型上,以上三者互相制约,无法做到三个参数同时最优,造成雷达的性能受到影响。
技术实现要素:
5.本技术提供了一种雷达及交通工具,旨在改善雷达的性能。
6.第一方面,提供了一种雷达,该雷达应用于交通工具上,作为交通工具行驶时重要的探测工具,因此雷达的性能直接影响到交通工具的安全。本技术提供的雷达包括光源、第一衍射光束元件、第二衍射光束元件、反射组件及探测器。其中,光源用于发射探测的光线,第一衍射光束元件用于将光线衍射出至少两个第一光束,第二衍射光束元件用于将所述至少两个第一光束汇集到设定位置,之后通过反射组件反射到探测区。上述的反射组件包括用于将汇集到所述设定位置的至少两个第一光束反射到探测区的反射镜,以及用于驱动所述反射镜摆动的驱动机构。探测器用于接收从所述探测区反射回的至少两个第二光束。并将信号传递到后续的器件。在上述技术方案中,通过采用第一衍射光束元件和第二衍射光束元件的配合,将光源发射的光线衍射出至少两个第一光束,并可通过两个第一光束进行探测,提高了探测区的范围,同时采用一个光源即可实现扩展探测区,简化了整个雷达的结构,提高了雷达的性能。
7.在一个具体的可实施方案中,所述第一衍射光束元件用于将所述光线衍射出奇数个第一光束。通过衍射出不同个数的光线实现探测。
8.在一个具体的可实施方案中,所述第一衍射光束元件为分束器,所述第二衍射光束元件为合束器。通过采用分束器和合束器实现对光线的分散以及聚拢,方便反射组件进行反射。
9.在一个具体的可实施方案中,所述第二衍射光束元件在将所述至少两个第一光束汇集到所述设定位置时,每个第一光束的入射角不同。保证了每个第一光束可探测不同区域。
10.在一个具体的可实施方案中,所述设定位置为所述反射镜的反射面。提高了反射
的效果。
11.在一个具体的可实施方案中,所述反射镜还用于反射所述探测区反射回的至少两个第二光束;所述雷达还包括分束反射光阑,所述分束反射光阑位于所述第二衍射光束元件到所述反射组件之间的光路;所述分束反射光阑用于透过所述第二衍射光束元件汇聚的至少两个第一光束,且反射所述反射镜反射回的所述至少两个第二光束;
12.所述探测器用于接收所述分束反射光阑反射的所述至少两个第二光束。通过设置的分束反射光阑进一步提高了雷达的紧凑性,降低雷达的体积。
13.在一个具体的可实施方案中,所述分束反射光阑包括:主体,所述主体上设置有用于透过所述至少两个第一光束的透光结构;反射层,设置在所述主体靠近所述反射镜的一侧,且避让所述透光结构,所述反射层用于反射至少两个第二光束。提高了透光以及反光的效果。
14.在一个具体的可实施方案中,所述透光结构为设置在所述主体上的通孔;或,所述透光结构为所述主体的一部分透光区域。通过不同的结构透光。
15.在一个具体的可实施方案中,在所述透光结构为所述主体的部分透光区域时,所述透光区域靠近所述第二衍射光束元件的一侧设置有抗反层。降低入射光线的反射。
16.在一个具体的可实施方案中,所述分束反射光阑还包括吸光层,所述吸光层设置在所述主体靠近所述第二衍射光束元件的一侧,且所述吸光层避让所述透光结构。降低杂光的影响。
17.在一个具体的可实施方案中,还包括接收透镜,用于接收所述分束反射光阑反射的所述至少两个第二光束,并将所述至少两个第二光束汇聚到所述探测器。通过接收透镜实现对第二光束的聚拢,以便于探测器接收。
18.在一个具体的可实施方案中,所述探测器直接接收所述探测区中反射的所述至少两个第二光束。探测区反射的第二光束可直接照射到探测器,简化了雷达的器件。
19.在一个具体的可实施方案中,所述探测器与所述反射镜并排设置。方便器件设置。
20.在一个具体的可实施方案中,所述至少两个第一光束中,相邻的第一光束对应的探测区域部分重叠。避免出现遗漏,提高了探测的准确性。
21.在一个具体的可实施方案中,还包括准直结构,所述准直结构用于准直所述光源发射到所述第一衍射光束元件的光线。方便了第一衍射光束元件对光线进行分束。
22.第二方面,提供了一种交通工具,该交通工具包括信息处理模块,以及与所述信息处理模块连接的上述任一项所述的雷达。在上述技术方案中,通过采用第一衍射光束元件和第二衍射光束元件的配合,将光源发射的光线衍射出至少两个第一光束,并可通过两个第一光束进行探测,提高了探测区的范围,同时采用一个光源即可实现扩展探测区,简化了整个雷达的结构,提高了雷达的性能。
附图说明
23.图1为本技术实施例提供的雷达的应用场景示意图;
24.图2为本技术实施例提供的雷达的光路系统示意图;
25.图3为本技术实施例提供的雷达的结构示意图;
26.图4为本技术实施例提供的第一种光栅结构示意图;
27.图5为本技术实施例提供的第二种光栅结构示意图;
28.图6为本技术实施例提供的第三种光栅结构示意图;
29.图7为本技术实施例提供的第四种光栅结构示意图;
30.图8为本技术实施例提供的第五种光栅结构示意图;
31.图9为本技术实施例提供的分束反射光阑的结构示意图;
32.图10为本技术实施例提供的第二种雷达的结构示意图。
具体实施方式
33.下面将结合附图对本技术实施例作进一步描述。
34.雷达应用于交通工具上,上述的交通工具包括但不限定以非可再生能源或新能源作为驱动的交通工具,其中非可再生能源驱动的交通工具可以包括以汽油、柴油、乙醇等燃料驱动的汽车、公交车、卡车等。新能源作为驱动的交通工具可以包括以电能作为驱动的汽车、公交车、卡车等。
35.雷达用于探测交通工具周边环境,并将探测的数据反馈给交通工具的中控电脑,以给中控电脑提供判断信息的数据。如图1示出了雷达在设置在汽车时的示意图,图1中的虚线示意的是雷达100与信息处理模块200的数据交互,并不代表雷达100与信息处理模块200的实际连接线缆。在汽车行驶过程中,雷达100可探测其探测区域内的外界环境,并将探测的信息反馈给信息处理模块200,信息处理模块200通过雷达100探测数据进行判断。信息处理模块200可为汽车上的中控电脑或者其他具有信号处理功能的芯片,上述的雷达100可为激光雷达或其他类型的雷达。激光雷达是自动驾驶中不可缺少的技术,相对于摄像头的优势在于3d模型的准确建立及夜间行驶,可提供更丰富且准确的数据,更轻松建造模拟环境。帮助判断周围车辆及物体的互动。同时,激光雷达也是当前交通标志识别、自适应巡航控制(adaptive cruise control,简称acc)、盲点检测、防撞系统和车道偏离警告等系统中的关键组件。目前市场的激光雷达fov(field of view,视场角)相对较小,而相对大的fov通常是用多个光源堆叠实现,工艺复杂,造价高,在竞争力上很难做到性能与成本的平衡。为此本技术实施例提供了一种雷达。下面结合具体的附图以及实施例对雷达进行详细的说明。
36.首先说明本技术实施例设计到的“第一光束”和“第二光束”,第一光束为探测光线,第二光束为第一光束照射到被探测物后反射后的光线。
37.图2示出了本技术实施例提供的一种雷达的光路系统。雷达包含光发射系统10、光扫描系统30及光接收系统20。
38.发射系统10发射出光线照射到光扫描系统30,光扫描系统30控制光线在探测区40内扫描,被探测物反射的光线反射到光扫描系统30,再反射到光接收系统20,光接收系统20将光信号转换成电信号,完整雷达的探测功能。雷达还可包括控制及数据处理模块50,控制及数据处理模块50分别与光发射系统10及光接收系统20连接,用于控制光发射系统10发射激光,并可接收光接收系统20中的光线并将其转换成的电信号。
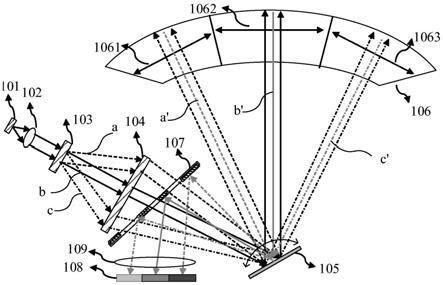
39.图3示出了本技术实施例提供的一种雷达的结构示意图。本技术实施例提供的雷达包括:光源101、第一衍射光束元件103、第二衍射光束元件104、反射组件105及探测器108等部件。其中,光源101、第一衍射光束元件103、第二衍射光束元件104作为光发射系统,反
射组件105作为光扫描系统,探测器108作为光接收系统。
40.光源101用于发射探测的光线,该光线为非可见光,如波长大于760nm的光线。光源101可选用不同的光源,如led灯、激光发射器或其他可发射平行光的光源件。在一个可选的方案中,光源101采用激光发射器,发射的激光具有相干性好、平行度好以及亮度高等优点,适合进行探测。
41.作为一个可选的方案,在光源101发射的光线是发散光线时,光发射系统还包括一个准直结构102,用于准直光源101发射到第一衍射光束元件103的光线。准直结构102设置在光源101与第一衍射光束元件103之间的光路上。光源101发射的光线照射到准直结构102后,通过准直结构102折射成平行的光线(对光线进行准直)后再照射到第一衍射光束元件103。准直结构102可采用不同的结构实现,示例性的,准直结构102可以采用单一的透镜,也可采用透镜组合。具体的,准直结构102可采用单面凸透镜、双面凸透镜或者棱镜等常见的将发散光线折射成平行光线的透镜;或者,准直结构102可采用凸透镜与凹透镜的组合、凸透镜与凸透镜的组合、凸透镜与棱镜的组合等不同的透镜组合,以将发散的光线折射成平行的光线。
42.上述的准直结构102作为一个可选的部件,在光源101发射的光线为平行光线时,可不采用上述的准直结构102,光源101发射的光线可直接照射到第一衍射光束元件103。
43.第一衍射光束元件103用于将光线衍射出至少两个第一光束。示例性的,如图3中所示的光线在穿过第一衍射光束元件103时,被衍射成三个第一光束,光线在经过第一衍射光束元件103后被分为第一光束a、第一光束b及第一光束c。第一光束a、第一光束b及第一光束c均可作为扫描的光线。在通过反射组件105进行扫描时,第一光束a、第一光束b及第一光束c可扫描不同的区域。
44.应当理解的是,本技术实施例提供的第一衍射光束元件103衍射的第一光束的个数不仅限于图3中所示的三个,可根据具体的实际情况选择需要衍射的第一光束的个数。示例性的,可通过第一衍射光束元件103将一束光线衍射成两个、三个、四个、五个等不同个数的第一光束。
45.在一个可选的方案中,第一衍射光束元件103用于将光线衍射出奇数个第一光束。在采用奇数个第一光束时,对应的探测区106划分为奇数个区域,位于探测区106中间的区域,可通过一个第一光束进行扫描,如图3中所示的第一光束b。
46.在具体对探测区106进行扫描时,可采用奇数个第一光束,也可采用偶数个第一光束。两者相比,采用偶数个的第一光束进行扫描,对探测区106中的中间区域需要两个第一光束扫描后拼接形成图形;而采用奇数个第一光束扫描时,探测区106正中间的位置仅通过一个第一光束扫描,可改善对探测区106的中间区域探测的效果。
47.第二衍射光束元件104用于将至少两个第一光束汇集到设定位置,以便于反射组件105进行反射。如图3中示例,第一光束a、第一光束b及第一光束c在经过第二衍射光束元件104时,第一光束b的入射角度垂直于第二衍射光束元件104的入射面,第一光束b直接穿过,传播方向未变;第一光束a和第一光束c以一定的入射角(小于90
°
)照射到第二衍射光束元件104的入射面。在从第二衍射光束元件104中射出时,第一光束a和第一光束c的传播方向朝向第一光束b靠拢,第一光束a、第一光束b和第一光束c汇聚到的设定位置可为反射组件105的反射面。第一光束a、第一光束b及第一光束c照射到反射面时,可汇聚成一个点,或
者汇聚到一个区域。
48.第二衍射光束元件104在将至少两个第一光束汇集到设定位置时,每个第一光束的入射角不同。如图3中所示,第一光束a、第一光束b及第一光束c在照射到反射面时,第一光束a、第一光束b及第一光束c照射到反射面时的入射角均不相同,以保证第一光束a、第一光束b及第一光束c在经反射面反射时,可以以不同的角度反射,并照射到探测区中不同的探测位置。
49.反射组件105用于实现雷达探测扫描,可包含反射镜以及驱动机构。反射镜具有用于反射汇集到设定位置的至少两个第一光束的反射面,反射面即为上述描述的反射组件105的反射面。上述的设定位置即为反射镜的反射面,第一光束a、第一光束b及第一光束c可在反射面上汇聚成一个点,或者汇聚在一个区域内。
50.第一光束照射到反射面时,可通过反射面反射到探测区106。以图3中所示的第一光束a、第一光束b及第一光束c为例。第一光束a、第一光束b及第一光束c照射到反射面时,第一光束a、第一光束b及第一光束c照射到反射面时的入射角不相同,以使得第一光束a、第一光束b及第一光束c可以照射到探测区106的不同区域。为方便描述将探测区106划分成三个子区:第一子区1061、第二子区1062、第三子区1063。其中,第一子区1061与第一光束a对应,第一子区1061为第一光束a在反射镜摆动时,第一光束a扫描的区域;第二子区1062与第一光束b对应,第二子区1062为第一光束b在反射镜摆动时,第一光束b扫描的区域;第三子区1063与第一光束c对应,第三子区1063为第一光束c在反射镜摆动时,第一光束c扫描的区域。通过第一光束a、第一光束b及第一光束c在对应的第一子区1061、第二子区1062及第三子区1063中扫描,实现了雷达对整个探测区106的扫描。
51.图3中的探测区的划分仅为一个示例,在第一衍射光束元件103分束出多个第一光束时,对应的探测区106也划分为多个子区,且子区的个数与第一光束的个数一一对应。
52.上述的反射镜可为平面镜、凹面镜或者凸面镜等不同的反射镜,只需可满足将第一光束a、第一光束b及第一光束c反射到上述的探测区106即可。
53.驱动机构用于提供反射镜摆动的动力。驱动机构与反射镜连接,并位于反射镜背离反射面的一侧。驱动机构可采用常见的可实现摆动的机构,如四连杆机构、凸轮机构、间歇运动机构等,或者采用mems(micro-electro-mechanical system,微机械系统)。驱动机构在使用时,驱动反射镜绕一轴线沿图3中所示的箭头方向摆动,反射镜在摆动时,第一光束a、第一光束b及第一光束c照射到反射面的入射角不断改变,出射角也不断改变,以实现对上述三个子区的扫描。
54.在一个可选的方案中,至少两个第一光束中,任意相邻的第一光束对应的探测区域部分重叠,以避免扫描时出现遗漏,提高了探测的准确性。示例性的,第一光束a扫描的第一子区1061和第一光束b扫描的第二子区1062之间具有重叠的区域。在第一光束a与第一光束b扫描时,第一光束a和第一光束b均扫描第一子区1061和第二子区1062重叠的区域。第一光束b扫描的第二子区1062和第一光束c扫描的第三子区1063之间具有重叠区域。在第一光束b和第一光束c扫描时,第一光束b和第一光束c均扫描第二子区1062和第三子区1063重叠的区域。在采用上述方案时,避免子区之间的边界处被遗漏,通过重复扫描子区边界的重叠区域,之后再通过后期数据处理,可将第一子区1061、第二子区1062和第三子区1063的信息拼接成完整的探测区106信息。上述数据处理可为常见的图像拼接处理,在此不再详细赘
述。
55.第一光束a、第一光束b及第一光束c照射到探测区106后,探测区106中的被探测物将光束反射回。反射的光束为第二光束,以上述三个第一光束为例,对应的反射光束为:第一光束a的反射光束为第二光束a',第一光束b的反射光束为第二光束b',第一光束c的反射光束为第二光束c'。在光束照射到被探测物时,可以在不同方向进行反射,因此每个第一光束均对应多个第二光束。探测器108只需接收到一个方向的第二光束即可实现对被探测物的探测。
56.图3中示例了出了在采用同轴接收的探测器放置方式。反射组件105中的反射镜还用于反射探测区106反射回的至少两个第二光束。以图3中所示的三个第二光束为例,第二光束a'、第二光束b'、第二光束c'的照射路径与第一光束a、第一光束b及第一光束c相反。第二光束a'、第二光束b'、第二光束c'从探测区106后射出后,先照射到反射组件105中的反射镜,通过反射镜反射后沿与第一光束a、第一光束b及第一光束c照射方向相反的方向照射。为避免第二光束a'、第二光束b'及第二光束c'照射回第二衍射光束元件104。本技术实施例提供的雷达设置了一个分束反射光阑107,分束反射光阑107位于第二衍射光束元件104到反射组件105之间的光路。在设置到该位置时,分束反射光阑107应不影响上述的至少两个第一光束的传播,同时也应该避免反射回的第二光束照射到第二衍射光束元件104。因此本技术实施例提供的分束反射光阑107可透过第二衍射光束元件104汇聚的至少两个第一光束,同时可反射反射镜反射回的至少两个第二光束。
57.在一个可选的方案中,分束反射光阑107的反射面朝向反射镜,且反射面与光路(第二衍射光束元件104与反射组件105之间的光路)之间呈设定夹角。以改变第二光束的传播路径,使反射后的第二光束可照射到探测器108。示例性的,分束反射光阑107的反射面与光路的夹角为60
°
、45
°
、30
°
等不同的角度,分束反射光阑107的反射面与光路的夹角与探测器108相匹配,以使得分束反射光阑107反射的光线可照射到探测器108。
58.探测器108用于接收分束反射光阑107反射的至少两个第二光束,为接收所有的第二光束,探测器108的接收面也对应划分了多个区域,每个区域对应接收一个第二光束。以第二光束a'、第二光束b'及第二光束c'为例。探测器108的接收面划分为第一接收区、第二接收区及第三接收区。其中,第一接收区用于接收第二光束a',第二接收区用于接收第二光束b',第三接收区用于接收第二光束c'。
59.在一个可选的方案中,雷达还包括接收透镜109,用于接收分束反射光阑107反射的至少两个第二光束,并将至少两个第二光束汇聚到探测器108。接收透镜109设置在分束反射光阑107与探测器108之间,并用于调整照射到探测器108内的第二光束。接收透镜109可采用不同的结构实现,既可以采用单一的透镜,也可采用透镜组合。示例性的,接收透镜109可采用单面凸透镜、双面凸透镜或者棱镜等常见的将发散光线折射成平行光线的透镜;或者,接收透镜109还可采用凸透镜与凹透镜的组合、凸透镜与凸透镜的组合、凸透镜与棱镜的组合等不同的透镜组合,以将发散的光线折射成平行的光线
60.上述的接收透镜109作为一个可选的部件,可不采用上述的接收透镜109,此时,分束反射光阑107反射的第二光束可直接照射到探测器108。
61.由上述描述可看出,在本技术通过采用第一衍射光束元件103和第二衍射光束元件104,实现了将一个光源101发射出多个光束,并通过一个反射组件105即可实现多个光束
的扫描,增大了雷达的探测区106范围。同时,采用一个光源101即可实现扩展探测区106,简化了整个雷达的结构。提高了雷达的性能。另外,采用分束反射光阑107反射第二光束,使得整个雷达的结构可更佳紧凑,减少雷达的占用面积。
62.上述第一衍射光束元件103和第二衍射光束元件104,一个用于分波,一个用于合波。作为一个具体的示例,第一衍射光束元件103可为分束器,第二衍射光束元件104可为合束器。分束器和合束器的本质都是光栅结构,下面结合附图列举几种具体的光栅。
63.图4示出了第一种光栅,该光栅300为矩形光栅,矩形光栅具有单排排列的矩形凸起301。矩形光栅可应用于第一衍射光束元件中,在第一衍射光束元件衍射出奇数个第一光束时,可采用图4所示的第一种光栅。图4所示的第一种光栅还可应用于第二衍射光束元件中。
64.图5示出了第二种光栅,该光栅300为等腰梯形光栅,腰梯形光栅具有单排排列的梯形凸起302。等腰梯形光栅可应用于第一衍射光束元件中,在第一衍射光束元件衍射出奇数个第一光束时,可采用图5所示的第一种光栅。
65.第一衍射光束元件在衍射奇数个第一光束时,采用的光栅300不仅限于图4级图5所示的两种光栅。其他的对称凸起的光栅也可应用到第一衍射光束元件中。
66.图6示出了第三种光栅,该光栅300为斜矩形光栅,斜矩形光栅具有单排排列的倾斜的矩形凸起303,且倾斜的矩形凸起沿光栅的轴线o对称。斜矩形光栅可应用于第一衍射光束元件中,在第一衍射光束元件衍射出偶数个第一光束时,可采用图6所示的光栅结构。当然其他对称类型(凸起相对轴线o对称)的光栅也可以应用在第一衍射光束元件。
67.图7示出了第四种光栅300,该光栅为斜矩形光栅,斜矩形光栅具有单排排列的倾斜的矩形凸起304,且倾斜的矩形凸起朝一个方向倾斜。斜矩形光栅300可应用于第二衍射光束元件中。
68.图8示出了第五种光栅,该光栅300为梯形光栅,梯形光栅具有单排排列的梯形凸起305,梯形凸起305可为直角梯形凸起。梯形光栅可应用于第二衍射光束元件中。
69.上述图4~图8仅仅示例出了几种具体的光栅结构,本技术实施例提供的第一衍射光束元件和第二衍射光束元件还可采用其他满足其功能的光栅。
70.图9示出了分束反射光阑的结构。分束反射光阑107包括一个主体1071,主体1071为板状结构,具有相背的两个表面:第一表面和第二表面。第一表面朝向第二衍射光束元件并为第一光束的入射面,第二表面朝向反射组件并为第二光束的反射面。
71.主体1071上设置有用于透过至少两个第一光束的透光结构1072,第一光束通过透光结构1072可穿过主体1071从第二表面射出。透光结构1072的个数与第一光束的个数一一对应,或者一对多。示例性的,第一光束a、第一光束b及第一光束c分别对应一个透光结构1072,每个透光结构1072的形状与第一光束的形状匹配,以使得第一光束可穿过;或者,采用一个透光结构1072可同时透过第一光束a、第一光束b及第一光束c;或者,采用一个透光结构1072透过第一光束a和第一光束b,另一个透光结构1072透过第一光束c等情况。在具体设置时可根据实际的情况而定。
72.透光结构1072可采用不同的结构,示例性的,在主体1071为透光材质制备而成时,透光结构1072即为主体1071的部分透光区域。如主体1071的材质为玻璃、透光树脂、透光塑料等材质,
73.在一个可选的方案中,在主体1071靠近第二衍射光束元件的一侧(第一表面)设置吸光层1075,该吸光层1075避让透光结构1072,即在吸光层1075上挖孔,使得主体1071的第一表面外露部分区域,透光结构1072即为主体1071的一部分透光区域,该透光区域作为第一光束的入射区域。第一光束照射到透光区域后即可透过主体1071。在采用吸光层1075时,可避免杂光照射入分束反射光阑107,减少了光线的串扰,提高了检测的准确性。
74.示例性的,吸光层1075可以采用cr,cr+介质,或者其他材料而成,上述材质为已有的材质,因此在本技术不再详细赘述。
75.在一个可选的方案中,透光区域靠近第二衍射光束元件的一侧设置有抗反层1074。抗反层1074用于降低入射到透光区域的第一光束的反射,以使得更多的第一光束入射到透光区域中。示例性的,抗反层1074可采用sio2、ta2o5、al2o3等材料构成的多层介质膜。上述材质为已有的材质,因此在本技术不再详细赘述。
76.在具体设置抗反层1074和吸光层1075时,抗反层1074和吸光层1075可同层设置,也可位于不同层。
77.透光结构1072还可为设置在主体1071上的通孔。通孔贯穿主体1071,通孔的开口分别位于第一表面和第二表面。在透光结构1072采用通孔时,无需对主体1071的材质做限定,主体1071既可以采用透光材料,也可以采用非透光材料。在主体1071采用非透光材料时,无需设置吸光层1075,通过主体1071的材质即可防止其他光线的串扰;在主体1071采用透光材料时,可在第一表面设置吸光层1075,吸光层1075避让通孔。
78.在透光结构1072采用通孔时,第一光束在穿过透光结构1072时,不会产生反射,因此无需设置抗反层1074,第一光束可直接穿过透光结构1072。
79.分束反射光阑107还包括反射层1073,反射层1073设置在主体1071靠近反射镜的一侧(第二表面),反射层1073用于反射至少两个第二光束。反射层1073在设置时避让透光区域,具体的,反射层1073上设置有与透光区域对应的通孔。无论透光结构采用任何形式,反射层1073均需要设置与其对应的通孔,以保证第一光束可穿过主体1071后射出。
80.示例性的,反射层1073可采用al、au或其他具有良好反射效果的材质制备的反射层。上述材质为已有的材质,因此在本技术不再详细赘述。
81.反射层1073可采用不同的结构形式,示例性的,反射层1073与主体1071为一体结构,此时反射层1073可以为第二表面,通过将第二表面加工成镜面,实现对第二光束的反射。或者反射层1073与主体1071为独立的结构,反射层1073可粘接在第二表面或者直接形成在第二表面。
82.图10示出了本技术实施例提供的另一种雷达。图10中的部分标号可参考图3中的相同标号。在本技术中不同图示之间的相同标号代表同一部件。
83.图10中的光源101、第一衍射光束元件103、第二衍射光束元件104、反射组件105的结构以及连接关系可参考上述关于第一种雷达的相关描述,在此不再详细赘述。
84.图10所示的雷达与图3中所示的雷达的区别在于探测器201的摆放位置。在图10所示的雷达中,探测器201直接接收探测区106中反射的至少两个第二光束。设置时,探测器201与反射镜并排设置,探测器201可接收照射到其他区域(除反射镜外的区域)的第二光束。如图10所示的,第二光束a'、第二光束b'及第二光束c'从探测区106反射后直接入射到探测器201中,无需反射组件105反射,也无需设置分束反射光阑。简化了整个雷达的结构。
85.探测器201的具体功能以及结构可参考图3中的雷达中关于探测器201的相关描述,在此不再详细赘述。
86.应当理解的是,图10所示的探测器201的设置位置,仅仅为探测器201设置位置的一个具体示例,本技术实施例提供的雷达中的探测器201可根据需要检测的第二光束的位置设置探测器201。
87.在一个可选的方案中,图10所示的雷达也可包括准直结构102以及接收透镜202,其具体结构可参考上述关于第一种雷达的描述,在此不再详细赘述。
88.在一个具体的可实施方案中,探测区106反射的第二光束可直接照射到探测器201,此时,无需接收透镜202,简化了雷达的器件。
89.通过上述图3及图10所示的雷达可看出,本技术实施例提供的雷达通过第一衍射光束元件、第二衍射光束元件及反射组件件的配合实现了一个光源对多个区域探测的效果。对于探测器,可采用不同的方式设置,只需满足探测器可接收探测区反射回的至少两个第二光束即可。至于探测器是直接接收,还是间接接收,在本技术实施例中不做具体限定。
90.本技术实施例还提供了一种交通工具,上述的交通工具包括但不限定以非可再生能源或新能源作为驱动的交通工具,其中非可再生能源驱动的交通工具可以包括以汽油、柴油、乙醇等燃料驱动的汽车、公交车、卡车等。新能源作为驱动的交通工具可以包括以电能作为驱动的汽车、公交车、卡车等。
91.如1所示,交通工具包括信息处理模块200,以及上述任一项的雷达100。信息处理模块200可为汽车上的中控电脑或者其他具有信号处理功能的芯片。信息处理模块200分别与雷达100中的光源以及探测器连接,以控制雷达100工作,具体的控制方式为常见的控制方式,在此不再赘述。在上述技术方案中,通过采用第一衍射光束元件和第二衍射光束元件的配合,将光源发射的光线衍射出至少两个第一光束,并可通过两个第一光束进行探测,提高了探测区的范围,同时采用一个光源即可实现扩展探测区,简化了整个雷达100的结构,提高了雷达100的性能。
92.显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1