测距装置、测距系统以及测距方法与流程
测距装置、测距系统以及测距方法
1.本技术享受以日本专利申请2020-45182号(申请日:2020年3月16日)为基础申请的优先权。本技术通过参照该基础申请而包含该基础申请的全部内容。
技术领域
2.本发明的实施方式涉及测距装置、测距系统以及测距方法。
背景技术:
3.以往,测距方式存在时间检测方式、频率差检测方式、相位检测方式等,但从安装的简便性考虑,采用了通过各装置间的通信来求出各装置间的距离的通信型相位检测方式的测距系统受到关注。
4.可以考虑将这样的测距系统组装到便携终端等所采用的数据通信装置中。但是,在将数据通信用的电路与测距用的电路进行了组合的情况下,电路规模会变大。
5.此外,在利用用于数据通信的信道来发送测距用的信号的情况下,由于通常用于数据通信的信道间隔比较大,因此存在能够测距的距离较短这样的缺点。
技术实现要素:
6.实施方式提供测距装置、测距系统以及测距方法,在能够进行测距以及数据通信的装置中共用收发电路来抑制电路规模增大,并且能够进行比较长距离的测距。
7.实施方式的测距装置采用了基于相位检测方式的通信型测距,该测距装置具备:发送电路,构成为能够通过用于数据通信的多个信道进行发送,发送对发送数据进行调制而得到的发送信号;以及控制部,对上述发送电路进行控制,使其产生同一信道内的具有相互不同的频率的多个连续波,作为在基于上述相位检测方式的测距中使用的连续波。
附图说明
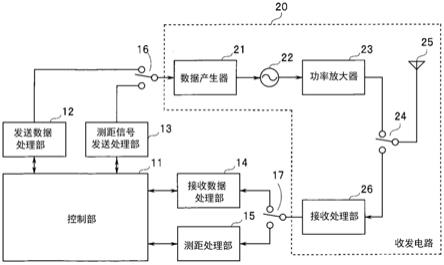
8.图1是表示本发明的一个实施方式的测距装置的框图。
9.图2是用于说明进行通信型测距的测距系统的一例的说明图。
10.图3是表示装置30、装置40的发送信号的例子的说明图。
11.图4是用于说明测距信号的频率成分的说明图。
12.图5是用于说明实施方式的动作的流程图。
13.图6是用于说明变形例的说明图。
具体实施方式
14.以下,参照附图对本发明的实施方式进行详细说明。
15.(实施方式)
16.图1是表示本发明的一个实施方式的测距装置的框图。本实施方式的测距装置兼作为采用了fsk(frequency shift keying:频移键控)调制的数据通信装置,是对于测距用
的电路部分和数据通信用的电路部分中的收发电路进行了共用的构成。此外,在本实施方式中,通过将在数据通信中使用的传输信道的1个信道内的频带中的多个cw(continuous wave:连续波)用于测距,由此能够进行比较长距离的测距。
17.在本实施方式中说明采用通信型测距的例子,该通信型测距采用使用了作为无调制载波的cw的相位检测方式,通过通信来求出装置间的距离。
18.图2是用于说明进行通信型测距的测距系统的一例的说明图。图2的测距系统为,通过测距装置30与测距装置40之间的通信来对装置30与装置40之间的距离进行测距。
19.装置30与装置40为相互相同的构成。装置30具备发送部32以及接收部33。发送部32产生用于测距的cw(以下,也称为测距信号)。来自发送部32的测距信号经由开关35而供给至天线34,并发送至装置40。此外,来自装置40的测距信号到达装置30的天线34。该测距信号经由开关35供给至接收部33而被接收。
20.此外,装置40的发送部42、接收部43、天线44以及开关45分别是与装置30的发送部32、接收部33、天线34以及开关35相同的构成。由此,来自装置30的测距信号在装置40中被接收,来自装置40的测距信号在装置30中被接收。
21.数字部31、41为相互相同的构成,分别对装置30或装置40的各部进行控制。即,数字部31使发送部32产生向装置40发送的测距信号,使接收部33接收来自装置40的测距信号。同样,数字部41使发送部42产生向装置30发送的测距信号,使接收部43接收来自装置30的测距信号。
22.(测距运算的一例)
23.接着,使用日本专利公开公报2018-155724号(以下,称为现有技术文献)中记载的方法对测距运算的一例进行说明。
24.装置30与装置40相互发送且接收频率f
l
的无调制载波即测距信号(cw),并相互发送且接收频率f
h
的无调制载波即测距信号(cw)。使用由装置30、40的未图示的振荡器生成的振荡信号的角频率ω
b
、ω
c
,设为频率2πf
l
=ω
c-ω
b
,并表现为2πf
h
=ω
c
+ω
b
。装置30、40的未图示的振荡器的振荡信号的频率严格来说不会成为相同。考虑到该偏差,装置30发送角频率为ω
c1
+ω
b1
的发送信号和角频率为ω
c1-ω
b1
的发送信号这2个波的发送信号。同样,装置40发送角频率为ω
c2
+ω
b2
的发送信号和角频率为ω
c2-ω
b2
的发送信号这2个波的发送信号。装置30、40接收相互的发送信号。
25.此外,设为,装置30的角频率为ω
c1
的振荡信号的初始相位为θ
c1
,频率为ω
b1
的振荡信号的初始相位为θ
b1
,装置40的角频率为ω
c2
的振荡信号的初始相位为θ
c2
,频率为ω
b2
的振荡信号的初始相位为θ
b2
。
26.将在装置40中延迟τ1后接收到从装置30向装置40发送的发送信号中的角频率ω
c1
+ω
b1
的发送信号之前产生的相移量设为θ
h1
(t),将在装置40中接收到角频率ω
c1-ω
b1
的发送信号之前产生的相移量设为θ
l1
(t)。
27.同样,将在装置30中延迟τ2后接收到从装置40向装置30发送的发送信号中的角频率ω
c2
+ω
b2
的发送信号之前产生的相移量设为θ
h2
(t),将在装置30中接收到角频率ω
c2-ω
b2
的发送信号之前产生的相移量设为θ
l2
(t)。
28.在该情况下,在现有技术文献中示出下述(1)式成立。
29.{θ
h1
(t)-θ
l1
(t)}+{θ
h2
(t)-θ
l2
(t)}
30.=(θ
τh1-θ
τl1
)+(θ
τh2-θ
τl2
)
……
(1)
31.其中,
32.θ
τh1
=(ω
c1
+ω
b1
)τ1……
(2)
33.θ
τh2
=(ω
c2
+ω
b2
)τ2……
(3)
34.θ
τl1
=(ω
c1-ω
b1
)τ1……
(4)
35.θ
τl2
=(ω
c2-ω
b2
)τ2……
(5)
36.装置30、装置40间的电波的延迟τ1、τ2与行进方向无关而相同,因此根据(1)式能够得到下述(6)式。
37.{θ
h1
(t)-θ
l1
(t)}+{θ
h2
(t)-θ
l2
(t)}
38.=(θ
τh1-θ
τl1
)+(θ
τh2-θ
τl2
)
39.=2
×
(ω
b1
+ω
b2
)τ1……
(6)
40.当将电波的速度设为c,装置30与装置40之间的距离设为r,延迟时间设为τ时,τ=r/c。将其代入(6)式,能够得到下述(7)式。
41.(1/2)
×
{(θ
τh1-θ
τl1
)+(θ
τh2-θ
τl2
)}
42.=(ω
b1
+ω
b2
)
×
(r/c)
……
(7)
43.根据该(7)式可知,能够根据角频率ω
b1
、ω
b2
、以及由装置30接收到的2个频率求出的相位差和由装置40接收到的2个频率求出的相位差的相加结果,计算出装置30与装置40之间的距离r。
44.另外,上述(7)式是在装置30、40中同时进行收发的处理的情况下的例子。但是,根据日本电波法的规定,存在无法同时进行收发的频带。因此,在现有技术文献中公开了与时间序列收发的情况对应的例子。
45.图3是用箭头表示该情况下的装置30、装置40的发送信号的例子的说明图。在图3所示的序列中,下述(8)式成立。此处,t0、d、t表示图3所示的延迟时间。
46.θ
h1
(t)+θ
h2
(t+t0)+θ
h1
(t+t0+d)+θ
h2
(t+d)
[0047]-{θ
l1
(t+t)+θ
l2
(t+t0+t)+θ
l1
(t+t0+d+t)+θ
l2
(t+d+t)}
[0048]
=2{(θ
τh1-θ
τl1
)+(θ
τh2-θ
τl2
)}=4
×
(ω
b1
+ω
b2
)τ1……
(8)
[0049]
即,在图3的序列中,装置30在规定定时发送角频率为ω
c1
+ω
b1
的发送波(以下,称为发送波h1a)。装置40在接收到发送波h1a紧后发送角频率为ω
c2
+ω
b2
的发送波(以下,称为发送波h2a)。进而,装置40在发送了发送波h2a之后再次发送角频率为ω
c2
+ω
b2
的发送波(以下,称为发送波h2b)。装置30在接收到第2次的发送波h2b之后再次发送角频率为ω
c1
+ω
b1
的发送波(以下,称为发送波h1b)。
[0050]
进而,装置30发送角频率为ω
c1-ω
b1
的发送波(以下,称为发送波l1a)。装置40在接收到发送波l1a紧后发送角频率为ω
c2-ω
b2
的发送波(以下,称为发送波l2a)。进而,装置40在发送了发送波l2a之后再次发送角频率为ω
c2-ω
b2
的发送波(以下,称为发送波l2b)。装置30在接收到第2次的发送波l2b之后再次发送角频率为ω
c1-ω
b1
的发送波(以下,称为发送波l1b)。
[0051]
如此,如图3所示,装置40在从规定的基准时间0起的规定时间取得基于发送波h1a的相位θ
h1
(t),在从时间t0+d起的规定时间取得基于发送波h1b的相位θ
h1
(t+t0+d),在从时间t起的规定时间取得基于发送波l1a的相位θ
l1
(t+t),在从时间t0+d+t起的规定时间取得
基于发送波l1b的相位θ
l1
(t+t0+d+t)。
[0052]
此外,装置30在从时间t0起的规定时间取得基于发送波h2a的相位θ
h2
(t+t0),在从时间d起的规定时间取得基于发送波h2b的相位θ
h2
(t+d),在从时间t0+t起的规定时间取得基于发送波l2a的相位θ
l2
(t+t0+t),在从时间d+t起的规定时间取得基于发送波l2b的相位θ
l2
(t+d+t)。
[0053]
装置30或40中的至少一方向另一方发送相位信息、即所求出的4个相位、或2个相位差、或相位差的上述(8)式的运算结果。接收到相位信息的装置30或40的控制部通过上述(8)式的运算来计算距离。
[0054]
(构成)
[0055]
图1表示图2的装置30(或40)的具体构成的一例。收发电路20与图2的发送部32、42以及接收部33、43对应。此外,在图1中,通过控制部11、发送数据处理部12、测距信号发送处理部13、接收数据处理部14、测距处理部15、开关16、17构成图2的数字部31、41。
[0056]
控制部11对图1的测距装置的各部进行控制。控制部11可以由使用了cpu(central processing unit:中央处理单元)、fpga(field programmable gate array:现场可编程门阵列)等的处理器构成,可以按照存储于未图示的存储器的程序进行动作来控制各部,也可以通过硬件的电子电路来实现功能的一部分或全部。
[0057]
发送数据处理部12和接收数据处理部14分别由用于数据通信的发送数据处理电路、接收数据处理电路构成,测距信号发送处理部13和测距处理部15分别由用于测距的测距信号发送处理电路和测距处理电路构成。收发电路20是在数据通信以及测距中被共同使用的电路。
[0058]
发送数据处理部12的输出以及测距信号发送处理部13的输出经由开关16供给至收发电路20。开关16由控制部11控制,将发送数据处理部12的输出或者测距信号发送处理部13的输出选择性地赋予给收发电路20。
[0059]
发送数据处理部12由控制部11控制,产生发送数据并输出到开关16。开关16在数据通信时选择发送数据处理部12的输出并输出到收发电路20。
[0060]
收发电路20进行如下处理:通过fsk调制来生成发送信号,并且对接收信号进行fsk解调而生成基带信号。即,收发电路20的数据产生器21经由开关16而被赋予发送数据。数据产生器21基于发送数据来产生用于fsk调制的数据并输出到振荡器22。振荡器22根据所输入的数据使振荡频率变化。
[0061]
如此,发送数据被fsk调制而从振荡器22得到发送信号。另外,振荡器22能够产生与多个信道对应的多个频率的发送信号。控制部11能够控制振荡器22所产生的发送信号的频率(信道)。
[0062]
振荡器22的输出被赋予给功率放大器23。功率放大器23对发送信号进行放大并经由开关24输出至天线25。开关24由控制部11控制,在发送时将功率放大器23与天线25连接,在接收时将天线25与接收信号取得部26进行连接。如此,在发送时,天线25发送来自功率放大器23的发送信号。
[0063]
天线25在接收时对接收信号进行接收,并经由开关24赋予给接收处理部26。接收处理部26对接收信号进行fsk解调处理,并输出解调信号。
[0064]
来自收发电路20的接收处理部26的解调信号被供给至开关17。开关17由控制部11
控制,将接收处理部26的输出选择性地赋予给接收数据处理部14或测距处理部15。开关17在数据通信时将来自接收处理部26的接收信号输出到接收数据处理部14。接收数据处理单元14从所输入的接收信号中恢复接收数据。
[0065]
在本实施方式中,测距信号发送处理部13由控制部11控制,产生用于输出上述2个频率的测距信号的信号。在本实施方式中,考虑到fsk调制方式下的传输,测距信号发送处理部13例如连续地产生并输出与逻辑值“1”对应的高电平(“h”)。另外,在以下的说明中,将连续的“1”或“h”的连续称为“连续1”。
[0066]
在测距时,控制部11使开关16选择测距信号发送处理部13的输出,通过开关17将接收处理部26的输出供给至测距处理部15。来自测距信号发送处理部13的连续1经由开关16赋予给数据产生器21。收发电路20的动作在测距时也与数据通信时相同。数据产生器21为,当被输入连续1时,从振荡器22输出与连续1对应的频率的振荡输出。
[0067]
即,在测距时,振荡器22的发送信号成为无调制载波即cw。例如,在相对于逻辑值“1”的频移被设定为200khz的情况下,当连续1被输入到收发电路20时,从振荡器22输出相对于规定的传输信道的中心频率+200khz的频率的cw。另外,来自振荡器22的发送信号的传输信道由控制部11设定。
[0068]
然而,可以考虑,利用使第1波与连续1对应地产生的方法,使第2波也与连续1对应地产生。例如,使用2个传输信道来产生与连续1对应的2个cw。
[0069]
然而,在使用了2个波的测距中,能够测距的距离为{光速c/(f
h-f
l
)}
×
(1/2)。在使用2个信道来产生2个cw的情况下,能够测距的距离受到信道间隔的限制。例如,在传输信道的信道间隔为3mhz的情况下,测距结果在大约50m折返,因此能够测距的距离为大约50m。
[0070]
因此,在本实施方式中,以在同一信道中产生2个波的测距信号的方式进行控制。即,控制部11对测距信号发送处理部13进行控制而使其产生连续1,并且连续地产生并输出与逻辑值“0”对应的低电平(“l”)的信号。另外,将连续的“0”或“l”的连续称为“连续0”。
[0071]
数据产生器21为,当被输入连续0时,从振荡器22输出与逻辑值“0”对应的频率的振荡输出。即,该情况下的来自振荡器22的发送信号也成为无调制载波即cw。例如,在相对于逻辑值“0”的频移被设定为-200khz的情况下,当连续0被输入到收发电路20时,从振荡器22输出相对于规定的传输信道的中心频率-200khz的频率的cw。
[0072]
在本实施方式中,以如下方式进行控制:作为测距信号的2个波中的第1波,例如使用与连续1对应地在规定的信道中产生的cw,作为第2波,例如使用与连续0对应地在与第1波相同的信道中产生的cw。
[0073]
在测距时,控制部11使开关16选择测距信号发送处理部13的输出,通过开关17将接收处理部26的输出供给至测距处理部15。来自测距信号发送处理部13的连续1或连续0经由开关16而赋予给数据产生器21。收发电路20的动作在测距时也与数据通信时相同。数据产生器21为,当被输入连续1时,从振荡器22输出与连续1对应的频率的振荡输出,当被输入连续0时,从振荡器22输出与连续0对应的频率的振荡输出。即,在测距时,振荡器22的发送信号成为无调制载波即cw,2个波的发送信号频率之差与对应于逻辑值“1”、“0”而设定的频移量对应。
[0074]
例如,在相对于逻辑值“1”的频移被设定为200khz的情况下,当连续1被输入到收发电路20时,从振荡器22输出相对于规定的传输信道的中心频率+200khz的频率的cw。在本
实施方式中,该情况下的cw用作为上述测距信号的2个波中的频率f
h
的信号。
[0075]
此外,在本实施方式中构成为,将相对于逻辑值“0”的频移设定为-200khz,当连续0被输入到收发电路20时,从振荡器22输出相对于具有频率f
h
的传输信道的中心频率-200khz的频率的cw。在本实施方式中,将该情况下的cw用作为上述测距信号的2个波中的频率f
l
的信号。
[0076]
接着,参照图4和图5对如此构成的实施方式的动作进行说明。图4是用于说明测距信号的频率成分的说明图,图5是用于说明实施方式的动作的流程图。
[0077]
图4的横轴为频率,表示用于数据通信的规定的n个信道(ch)的传输频带,向上的箭头表示各信道的中心频率。在本实施方式中,使用图4所示的n个传输信道进行数据通信以及测距。图4的传输信道表示每个信道具有3mhz的频带(信道间隔为3mhz)的例子,但信道间隔没有特别限定。
[0078]
此外,在图4的例子中,将规定的1个信道的频带放大而在下段表示,向上的虚线箭头与邻接的2个信道的中心频率对应。示出振荡器22如下构成的例子:产生与数据“1”对应的频移为200khz、与数据“0”对应的频移为-200khz的振荡输出。
[0079]
在图5的步骤s1中,控制部11判定是被设定为测距模式还是被设定为数据通信模式。例如,控制部11也可以根据来自未图示的主机的请求,对测距模式和数据通信模式进行设定。例如,主机也可以根据用户操作来指定测距模式和数据通信模式。
[0080]
控制部11为,在判定为未设定为测距模式的情况下,进行与数据通信模式相应的处理(步骤s2)。即,控制部11对发送数据处理部12以及接收数据处理部14进行控制而进行数据通信。发送数据处理部12产生发送数据。该发送数据经由开关16被供给至收发电路20的数据产生器21。数据产生器21基于发送数据产生用于fsk调制的数据而使振荡器22的振荡频率变化。由此,从振荡器22产生与发送数据相应的fsk被调制信号。来自振荡器22的fsk被调制信号(发送信号)在由功率放大器23放大之后,经由开关24向天线25供给而进行发送。
[0081]
在天线25中感应出的接收信号经由开关24供给至接收处理部26。接收处理部26对接收信号进行fsk解调而得到解调信号。在数据通信模式时,该解调信号经由开关17供给至接收数据处理单元14。通过接收数据处理单元14从所输入的接收信号恢复接收数据。如此,在数据通信模式下,进行数据的收发。
[0082]
控制部11在判定为被设定为测距模式的情况下,将处理从步骤s1转移到步骤s3。例如,用户在想要求出包括图1的测距装置在内的终端与他机之间的距离的情况下,指定测距模式。当指定测距模式时,控制部11在步骤s3中判定是否成为第1波发送定时,在判定为“否”的情况下,在步骤s6中判定是否成为第2波发送定时,当在此判定为“否”的情况下,在步骤s9中判定是否成为接收定时。
[0083]
例如,控制部11也可以进行控制,以便在数据通信中的规定的数据包中执行测距模式,而进行测距信号的发送以及接收。控制部11为,如果在步骤s3中检测到成为第1波的发送定时,则使测距信号发送处理部13产生连续1(步骤s4)。
[0084]
来自测距信号发送处理部13的连续1经由开关16供给到数据产生器21。数据产生器21从振荡器22产生与连续1对应的振荡输出、即振荡频率为信道的中心频率+200khz的无调制载波即cw,作为第1波输出(步骤s5)。例如,数据产生器21从振荡器22产生图4的第n信
道(ch)的中心频率+200khz的测距信号cw1,作为第1波。该第1波在由功率放大器23放大之后,经由开关24向天线25供给而进行发送。
[0085]
接着,控制部11为,当在步骤s3中判定为不是第1波的发送定时的情况下,在步骤s6中,判定是否成为第2波的发送定时。控制部11为,如果判定为成为第2波的发送定时,则进行测距信号的第2波的发送。
[0086]
在本实施方式中,控制部11为了在与第1波相同的信道中产生第2波的测距信号,而使测距信号发送处理部13产生连续0(步骤s7)。来自测距信号发送处理部13的连续0经由开关16供给到数据产生器21。数据产生器21从振荡器22产生与连续0对应的振荡输出、即振荡频率为包含第1波的信道的中心频率-200khz的无调制载波即cw,作为第2波输出(步骤s5)。例如,在第1波为图4的测距信号cw1的情况下,数据产生器21从振荡器22产生第n信道(ch)的中心频率-200khz的测距信号cw2,作为第2波。该第2波在由功率放大器23放大之后,经由开关24向天线25供给而进行发送。
[0087]
如此,从收发电路20输出同一信道内的2个波的测距信号。在图4的例子中,这些测距信号即cw1、cw2的频率间隔为400khz。因而,在该情况下,测距结果在大约375m折返,因此能够将能够测距的距离延长至大约375m。另外,在将2个波的测距信号设为邻接的信道的cw1、cw3的情况下,如上所述,能够测距的距离仅为大约50m。
[0088]
控制部11为,当在步骤s6中判定为不是第2波的发送定时的情况下,在步骤s9中判定是否成为接收定时。控制部11为,如果判定为成为接收定时,则控制开关24,将在天线25中感应出的接收信号供给至接收处理部26,通过fsk解调而得到解调信号。测距处理部15经由开关17取入解调信号,而检测相位。测距处理部15使用相位的检测结果,进行求出本机与他机之间的距离的测距运算。
[0089]
另外,在采用现有技术文献的方法的情况下,本机或者他机需要将相位的检测结果向对方设备传输。控制部11例如也可以通过使用了发送数据处理部12的数据通信,将该相位信息传输到对方设备。或者,控制部11也可以通过数据通信接收来自对方设备的相位信息。
[0090]
如此,在本实施方式中能够构成为,将采用了fsk调制的数据通信用的电路部分和测距用的电路部分中的收发电路进行共用,能够抑制电路规模增大。此外,在本实施方式中,将用于数据通信的传输信道的1个信道内的频带中的多个cw用于测距信号,能够进行比较长距离的测距。
[0091]
此外,在本实施方式中,在1个传输信道内产生2个波的cw,与仅使用连续1在1个传输信道内仅产生1个cw的情况相比,能够增多能够利用于测距信号的cw的数量,能够提高测距精度。
[0092]
另外,在图1中示出了包括测距以及数据通信中的发送装置和接收装置双方的装置,但也可以将发送装置与接收装置分体地构成,能够通过图1的控制部11、发送数据处理部12、测距信号发送处理部13、开关16、数据产生器21、振荡器22、功率放大器23以及天线25来构成测距用发送装置。同样,能够通过图1的控制部11、接收数据处理部14、测距处理部15、开关17、接收处理部26以及天线25来构成测距用接收装置。
[0093]
此外,不仅是控制部11,对于发送数据处理部12、测距信号发送处理部13、接收数据处理部14以及测距处理部15,也可以由使用了cpu、fpga等的处理器构成,也可以按照存
储于未图示的存储器的程序进行动作来控制各部,也可以通过硬件的电子电路来实现功能的一部分或者全部。
[0094]
(变形例)
[0095]
在上述实施方式中,对在1个传输信道内产生2个波的测距信号的例子进行了说明,但也可以在不同的传输信道中产生2个波的测距信号。例如,也可以将图4的(n-1)信道内的cw3和n信道内的cw2作为2个波的测距信号。
[0096]
在该情况下,也能够将能够测距的距离延长一些。
[0097]
(变形例)
[0098]
图6是用于说明变形例的说明图。在图6中,横轴为距离,纵轴为相位,表示出2个测距结果。
[0099]
由于无法检测到超过了2π的检测相位差,因此在测距结果中产生折返,相对于计算出的检测相位差存在多个距离的候补。在上述实施方式中,产生同一信道内的2个波的cw(测距信号),能够加长折返的距离。但是,可以认为使用了同一信道内的2个波的cw的测距结果的测距精度比较低。因此,在本变形例中,同一信道内的2个波的cw仅用于折返的修正,使用其他的cw的组来得到测距结果。
[0100]
在图6中,通过实线表示基于同一信道内的2个波的cw的组(以下,称为折返修正用cw的组)以外的2个波的cw的组(以下,称为测距用cw的组)的测距结果。测距用cw的组以2个cw的频率之差变得比较大的方式选择传输信道。因而,在使用了测距用cw的组的测距中折返的距离比较短,但测距精度比较高。
[0101]
在图6中,将上述(7)式的左边设为θ
det
而表示距离r与θ
det
之间的关系。图6的实线是使用了测距用cw的组的情况下的例子,虚线是使用了折返修正用cw的组的例子。另外,虽然在上述(7)式中计算出的检测相位差之和θ
det
还可以取-π(rad)与π(rad)之间以外的值,但图6所示的检测相位差之和θ
det
转换成-π(rad)与π(rad)之间。这是因为,一般在范围[-π(rad),π(rad)]内显示相位角。
[0102]
如图6的实线所示,可知在使用了测距用cw的组的情况下,与检测相位差之和θ
det
的变化相对的距离的变化较小,因此能够得到较高的测距精度。当假设在使用了测距用cw的组的情况下能够得到检测相位差之和θ
det0
时,如图6所示,作为测距结果的距离的候补而存在r1、r2、r3。
[0103]
另一方面,图6的虚线表示使用折返修正用cw的组而得到的检测相位差之和与距离之间的关系。图6的虚线表示折返的距离比较长的情况。为了从r1、r2、r3中选择正确的距离作为测距结果,只要选择这些距离中的根据使用了折返修正用cw的组而得到的检测相位差之和所得到的距离附近的距离即可。例如,在使用折返修正用cw的组检测到θ
det1
的情况下,能够将使用测距用cw的组而得到的距离r2判断为正确的测距结果。如此,同一信道内的2个波的cw的组用于测距结果的折返的修正。
[0104]
此外,在图6中示出了作为测距用cw的组而仅使用1组的例子,但也可以使用多组。此外,作为测距用cw的组,可以采用与连续1对应的规定信道的cw和与连续0对应的其他信道的cw的组,也可以采用与连续1彼此或连续0彼此对应的相互不同信道的cw的组。
[0105]
对本发明的几个实施方式进行了说明,但这些实施方式是作为例子而提示的,并不意图对发明的范围进行限定。这些新的实施方式能够以其他各种方式加以实施,在不脱
离发明的主旨的范围内能够进行各种省略、置换、变更。这些实施方式及其变形包含于发明的范围及主旨中,并且包含于权利要求所记载的发明和与其等同的范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1