输电线路金具的带电上线检测系统的制作方法
[0001]
本发明涉及电力检测装置,特别是输电线路金具的检测系统。
背景技术:
[0002]
高压输电线路在长期运行过程中,由于雷击、覆冰、风偏等外界因素影响以及自身材料、制造、安装工艺存在的问题,容易出现金具氧化腐蚀、接头松动等缺陷,从而威胁输电系统的安全运行。长期以来,对于输电线路线夹等部件的内部材料、机械结构类的缺陷缺乏有效的检测手段,难以准确评估其对与线路运行的危害性。
[0003]
x射线无损检测技术是一种可以实时成像的新型检测技术,能够在不停电、不解体的情况下,通过多方位x射线透视成像,配合专用的图像处理与识别技术,实现输电线路部件内部材料、结构的可视化与运行状态的快速诊断,可极大地提高故障定位与判别的准确性。但是目前,一般需要停电人工攀塔将设备带上去进行固定检测,不仅存在高空作业风险,检测成本也较高。
技术实现要素:
[0004]
本发明要解决的技术问题是:在于提供一种输电线路金具的带电上线检测系统,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
[0005]
本发明解决其技术问题的解决方案是:输电线路金具的带电上线检测系统,包括攀爬装置与检测装置,所述攀爬装置包括安装座,所述检测装置固定在安装座上。
[0006]
本发明的有益效果是:本发明通过利用攀爬装置将检测装置送到输电铁塔上,然后利用检测装置对输电线路线夹等部件进行检测,及早发现输电线路上的缺陷,维护电力供给的正常。而且检测装置带电自主上线,无需停电即可进行检测作业,避免了人员的高空作业风险,也减少了因为停电造成的经济损失和供电可靠性问题,该技术在电力系统内具有广阔的推广应用前景。
[0007]
作为上述技术方案的进一步改进,所述攀爬装置包括底座,所述底座上设有牵引机构,所述牵引机构包括两个卷带机,两个所述卷带机相对设置,两个所述卷带机之间设有攀爬带,所述攀爬带的两端分别与两个所述的卷带机连接。本方案中,利用两个卷带机的收卷作用,使得挂在输电线上的攀爬带的两端被同时收卷,然后使得底座能相对输电线向上攀爬。
[0008]
作为上述技术方案的进一步改进,所述卷带机包括直流电机、减速箱与带筒,所述攀爬带缠绕在带筒上,所述直流电机通过减速箱与所述带筒驱动连接。卷带机采用无线的直流电机,保证了使用的便捷性。当直流电机工作的时候,通过减速箱驱动带筒正转或翻转,从而实现收卷或放卷。收卷的时候,卷带机带动底座相对靠近电缆,而放卷的时候,卷带机带动底座相对远离电缆。
[0009]
作为上述技术方案的进一步改进,所述卷带机上还设有挡边与导轮,所述挡边位于所述带筒的外侧,所述攀爬带先绕过导轮再缠绕在带筒上。利用挡边,可以防止攀爬带在
收卷的时候跑偏,而利用导轮,可以使得收卷的动作更加顺畅。
[0010]
作为上述技术方案的进一步改进,所述攀爬装置还包括挂线机构,所述挂线机构安装在所述底座上,所述挂线机构包括活动座,所述活动座与所述底座活动连接,所述活动座上设有槽轮。当底座向上攀爬到位后,利用挂线机构动作,槽轮挂在了电缆上,从而使得整个攀爬装置通过槽轮能更牢固地挂在电缆上,方便后序的作业。
[0011]
作为上述技术方案的进一步改进,所述活动座的底部与所述底座铰接,所述槽轮安装在所述活动座的顶部,所述挂线机构还包括伸缩杆,所述伸缩杆的一端与所述底座铰接,所述伸缩杆的另外一端与所述活动座铰接。当底座向上攀爬到位后,伸缩杆动作,使得活动座发生转动,以此带动槽轮摆正在电缆的上方。伸缩杆优选为电动伸缩杆。
[0012]
作为上述技术方案的进一步改进,所述活动座上还设有顶升杆,所述顶升杆上设有夹紧轮,所述夹紧轮与所述槽轮的位置相对。当槽轮挂在了电缆上后,夹紧轮被顶起,抵住电缆的下方,利用槽轮以及夹紧轮,使得攀爬装置可以牢牢地挂在电缆上。
[0013]
作为上述技术方案的进一步改进,所述挂线机构还包括驱动机构,所述驱动机构与所述槽轮驱动连接。驱动机构带动槽轮转动,而当槽轮转动的时候,攀爬装置可以在电缆上行走。
[0014]
作为上述技术方案的进一步改进,所述检测装置包括机架,所述机架安装在所述安装座上,所述机架的两端分别设有射线机与成像板,所述射线机对着所述成像板。本检测装置利用x射线检测,可以准确地获取输电线路线夹等部件的实际情况。
[0015]
作为上述技术方案的进一步改进,所述安装座上设有升降机构,所述机架安装在所述升降机构上;所述机架上还设有翻转机构,所述射线机与成像板安装在所述翻转机构上。
附图说明
[0016]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单说明。显然,所描述的附图只是本发明的一部分实施例,而不是全部实施例,本领域的技术人员在不付出创造性劳动的前提下,还可以根据这些附图获得其他设计方案和附图。
[0017]
图1是本发明的整体结构示意图;
[0018]
图2是本发明的卷带机的结构示意图;
[0019]
图3是本发明的挂线机构的立体示意图;
[0020]
图4是本发明的检测装置的立体示意图;
[0021]
图5是本发明的检测装置的另外一个视角的立体示意图。
具体实施方式
[0022]
以下将结合实施例和附图对本发明的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本发明的目的、特征和效果。显然,所描述的实施例只是本发明的一部分实施例,而不是全部实施例,基于本发明的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形
象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
[0023]
在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0024]
在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
[0025]
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。同时,本发明创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合。
[0026]
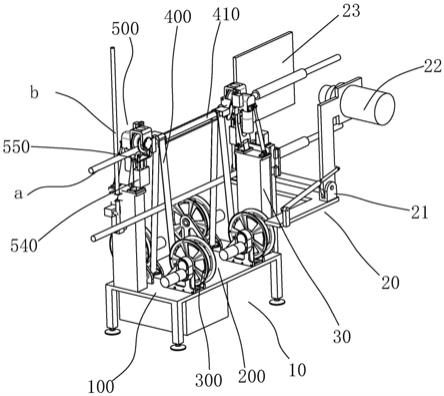
参照图1~图5,输电线路金具的带电上线检测系统,包括攀爬装置10与检测装置20,所述攀爬装置10包括安装座30,所述检测装置20固定在安装座30上。
[0027]
进一步作为优选的实施方式,所述攀爬装置10包括底座100,所述底座100上设有牵引机构200,所述牵引机构200包括两个卷带机300,两个所述卷带机300相对设置,两个所述卷带机300之间设有攀爬带400,所述攀爬带400的两端分别与两个所述的卷带机300连接。
[0028]
进一步作为优选的实施方式,所述卷带机300包括直流电机310、减速箱320与带筒330,所述攀爬带400缠绕在带筒330上,所述直流电机310通过减速箱320与所述带筒330驱动连接。
[0029]
进一步作为优选的实施方式,所述卷带机300上还设有挡边340与导轮350,所述挡边340位于所述带筒330的外侧,所述攀爬带400先绕过导轮350再缠绕在带筒330上。
[0030]
进一步作为优选的实施方式,所述攀爬装置10还包括挂线机构500,所述挂线机构500安装在所述底座100上,所述挂线机构500包括活动座510,所述活动座510与所述底座100活动连接,所述活动座510上设有槽轮520。
[0031]
进一步作为优选的实施方式,所述活动座510的底部与所述底座100铰接,所述槽轮520安装在所述活动座510的顶部,所述挂线机构500还包括伸缩杆530,所述伸缩杆530的一端与所述底座100铰接,所述伸缩杆530的另外一端与所述活动座510铰接。
[0032]
进一步作为优选的实施方式,所述活动座510上还设有顶升杆540,所述顶升杆540上设有夹紧轮550,所述夹紧轮550与所述槽轮520的位置相对。
[0033]
进一步作为优选的实施方式,所述挂线机构500还包括驱动机构560,所述驱动机构560与所述槽轮520驱动连接。
[0034]
进一步作为优选的实施方式,所述检测装置20包括机架21,所述机架21安装在所述安装座30上,所述机架21的两端分别设有射线机22与成像板23,所述射线机22对着所述成像板23。
[0035]
进一步作为优选的实施方式,所述安装座30上设有升降机构40,所述机架21安装在所述升降机构40上;所述机架21上还设有翻转机构50,所述射线机22与成像板23安装在
所述翻转机构50上。
[0036]
本检测系统利用x射线在介质中传播时的衰减特性,当将强度均匀的x射线从被检设备的一侧产生并发射后,由于缺陷部位与被检设备基体材料对射线的衰减特性不同,透过被检设备后的x射线强度将会不再均匀,用成像设备在另一侧检测透过被检设备后剩余的x射线强度,即可判断被检设备表面或内部是否存在缺陷,并能根据产生的x射线图像对缺陷类型与性质进行判断。
[0037]
x射线数字成像技术有数字射线成像(digital radiography,简称dr)和计算机射线成像(computed radiography,简称cr)两种。两者信号采集与处理不同,dr技术直接转换成数字图像,cr技术需要用扫描仪将图像从ip板等扫描成数字图像。
[0038]
本方案中,采用攀爬装置10自动上线技术将无损探伤检测装置20携带至导线上待测位置,能够在不停电、不解体的情况下,通过x射线透视成像,配合专用的图像处理与识别技术(上述的专用图像处理和识别技术不属于本专利申请所请求保护的内容,因此,在此不做详细的展开论述),实现输电线路部件内部材料、结构的可视化与运行状态的快速诊断,可极大地提高故障定位与判别的准确性。
[0039]
本输电线路金具的带电上线检测系统还包括控制系统,控制系统又包括主控制系统、通信系统、图形处理平台和电源管理系统。地面控制端通过433/2.4g信号实现对攀爬装置10及无损探伤检测装置20的无线遥控。
[0040]
x射线数字成像无损检测适用于输电线路的封闭不可视金属部件,包括线夹、导线等。
[0041]
其中,检测装置20包括:
[0042]
由前端设备、现场检测工装、操控及图形处理平台、设备健康状态图像数据平台构成。
[0043]
前端设备主要包括射线机22、数字平板成像器,采用国内外主流厂家的x射线数字成像产品。考虑到输电线路设备x射线检测的实际需求,射线机采用脉冲机,便携式设计,有效降低x光发射剂量,实现远距离安全控制,交流/电池双供电模式,适应各种工作环境的需要;射线管最大电压270kv,可穿透钢厚:1
″
(25.4mm)。数字平板23成像器吸收x射线并转换为光,然后将光转换为电荷。x射线照射过程中,电荷不断积累,由集成电路读出,并完成模数转换,产生数字图像。
[0044]
检测工装包括升降机构40、翻转机构50,实现对前端设备的各种平移、升降、旋转等机械控制,根据要求快速完成设备定位。检测设备根据超高压多分裂导线的实际环境和尺寸,检测设备x发射机到成像板的距离为30cm(小于相邻导线间距40cm,也小于导线与均压环间距60cm)。且整个装置设计重量不超过2公斤,便于高空吊装工作的合理施展。
[0045]
操控及图形处理平台远程操控机械传动装置及前端设备,完成设备位置控制及x射线的成像控制。接收前端设备回传的图像信息,实现智能分析,缺陷识别,检测报告。操控及图形处理平台具备一键式图像采集及处理功能;提供成像过程的影像记录,可用于巡检工作的回放、查找工作;根据监测设备不同计算合适的射线计量选定可穿透的最小管电压,根据射线机和成像板之间的距离自动计算射线发散的角度,同时具备这些图像采集参数的自动设置和远程人工调整能力;提供图像变换、增强、边缘检测、图像恢复、图像分割等一系列图像处理方法,提高x射线图像相对质量,以便有效提取信息;以x射线检测图像为基础,
结合检测参数设置、检测设备与被检测设备的相对位置、设备原始图纸尺寸,可进行尺寸量化及缺陷定位。
[0046]
射线机、数字平板成像器、检测工装均自带电池,操控及图形处理平台通过无线方式与射线机、数字平板成像器、检测工装进行通信,完成远程操作和控制。设备健康状态图像数据平台用于搜集设备全寿命周期局放及x射线图像数据,建立设备健康档案,对设备状态及其变化趋势进行持续的跟踪和分析,从而更加及时的发现设备缺陷及隐患。
[0047]
而其中攀爬装置10使用专用的微型放线无人机,用于协助将攀爬装置10的攀爬带400悬挂至高空输电导线上。
[0048]
该无人机由人工手持界面操作盒完成。首先,通过对飞控系统的控制精度及稳定性、载荷能力、抗干扰能力、续航时间、整机尺寸、遥控距离等方面的技术需求研究,搭建一套适合跨越输电线路导线飞行的微型无人机。结合fpv可视化技术,辅助观察无人机空中位置,保障作业安全性。放线装置置于飞行平台下方,遥控器控制接收机的舵机通道pwm占空比,通过调节增大或减少占空比从而控制舵机旋转,通过机构设计,形成装置抛投功能。
[0049]
微型放线无人机由微型无人机与放线装置相结合。通过微型放线无人机可将绝缘牵引绳投放后搭在目标导线上,从而能让地面端人员使用此绝缘牵引绳通过1级线牵引攀爬带,实现攀爬带从线缆a上方绕过。
[0050]
此时,实现了攀爬带400的放置。攀爬带400的两端自由下垂。而为了防止攀爬带400在工作的时候,对电缆产生损害,可以在线缆a上设置挂线架410。
[0051]
此时,将攀爬带400的两端卷入在卷带机300的带筒330中。同时,攀爬装置10的底座上还设有陀螺仪,同时还包括自动控制系统,由陀螺仪监控攀爬装置的倾斜角度后将数据发送到微处理器,然后微处理器控制各个卷带机的电机的启停与速度,从而实现将攀爬装置10平稳地攀爬至高压线上。优选地,牵引机构200有两组,两组的牵引机构200总共四个的卷带机,利用两组的牵引机构200,在带动底座100上升的时候,更加稳定。
[0052]
攀爬装置10的工作流程如下:
[0053]
①
在地面准备好后,人员在远离机器的地方通过遥控控制箱给攀爬装置发送挂接指令,攀爬开始自动上线;
[0054]
②
上升过程中微电脑通过陀螺仪传回的姿态信息,通过对比计算,得出补偿量,自动调节各个卷带机的电机的转动速度,使平台上升的过程始终保持相对平衡状态;
[0055]
③
在自动平衡上升到快接近线缆a时,先接近线缆a的机器一端会触发到限位感应器,微电脑接收到信号后自动控制该端两侧的攀爬电机停止,此时另一端依旧会继续攀爬,直至其也触发到限位感应器而停止,此时挂线机构500的槽轮520略高于线缆a;然后伸缩杆530动作,使得活动座510向前翻转,从而使得槽轮520正对着线缆a;
[0056]
④
待活动座510到位后,软件控制所有攀爬的卷带机的电机同步反转出一定长度的攀爬带,使槽轮520的凹槽可以卡入线缆a中;接着,顶升杆540将加紧轮550抬高,抵住线缆a的下表面。此时,即可完成攀爬作业。
[0057]
而挂线架410通过穿入其中的攀爬带上线缆a上,通过两侧攀爬带拉扯的不同组合方式实现地面挂接或者取下挂线架410。具体的挂线架上架方式如下:
[0058]
①
将挂线架410设计成带卡槽的结构形状;
[0059]
②
将攀爬带400按照特定顺序穿入挂线架410后,将特定的一侧用牵引绳牵引至攀
爬带越过线缆(例如是采用无人机);
[0060]
③
拉扯挂线架410上升方向一侧的攀爬带的同时放开挂线架410,让其跟随攀爬带一起上升至线缆高度,然后在地面将未拉扯的一侧交叉后继续拉扯上升方向那侧的攀爬带400,便可将挂线架扣入线缆a;
[0061]
④
作业过程中保持攀爬带400的两端同时受力便可保证挂线架410不脱离线缆;
[0062]
⑤
作业完后先反向拉扯攀爬带便可将挂线架拉脱离线缆,从而实现人员不上塔挂接挂线架。
[0063]
同时,还设有驱动机构560,通过在挂线机构500上设置可以行走的机构,能在架空输电线路不同线径上稳定行走,且有一定的爬坡能力,以及良好的续航能力,机构本身具备良好的机械性能及低故障率。
[0064]
还有,对于超高压对周围空气的电离,装置上线过程中进入电离范围后,且未达到与高压输电线等电位状态时,高压输电线线会对电离层范围内的导电进行电弧放电。电弧放电过程中,产生的高压冲击会直接破坏电子电路元器件,同时高压冲击产生的多次谐波会干扰电路及电源的正常运行。
[0065]
为此,本系统还采用如下的结构:在电控设备快进入高压电场范围时,在装置上端加装等电位棒b,快速与高压线路接触,实现设备与高压线的等电位。此时装置再进入电场中,电场则不会对装置内的电控设备发生放电,保证电子电路的正常运行。又或者,通过确保电路板和电线的绝缘性能良好,减少焊接点及分叉点,不得不焊接或分寸的位置必须加强绝缘性能保护。电路板使用多重绝缘措施,电路板在焊接完成后,使用环氧树脂封装,在确保绝缘性能的同时也可以减少尘埃附着带来的静电影响。对电路板周围使用空间及电线包裹屏蔽上导电性能良好的金属铝外壳,消除电线及电路板外围的静电势差,降低外界金属体对电线及电路板放电的可能。
[0066]
以上对本发明的较佳实施方式进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可作出种种的等同变型或替换,这些等同的变型或替换均包含在本申请权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1