一种腿臂复用式小天体附着取样一体化探测器的制作方法
[0001]
本发明涉及深空探测、空间机器人技术领域,具体涉及一种腿臂复用式小天体附着取样一体化探测器。
背景技术:
[0002]
小天体产生于太阳系形成初期,对小天体的研究将有助于揭示太阳系的演化过程及生命的起源,同时推进太空资源的开发与利用。对小天体研究的途径有多种,而最直接的途径是探测器着陆到小天体表面开展科学探测研究。由于小天体弱引力及表面特性不确定的限制,小天体表面着陆探测难度极大,因此目前小天体探测大多以绕飞或触碰探测为主。欧空局的rosetta探测器原计划于2014年在彗星表面进行固定探测,但最终固定失败。rosetta着陆机构采用可折展三腿式结构,探测器本体与着陆腿之间采用电磁阻尼缓冲单元,探测器设计有火工弹射鱼叉式锚固机构。日本的隼鸟1号、2号、美国的欧西里斯号均采样触碰方式在小行星表面进行了触碰采样。隼鸟1号、2号探测器采用射弹方式实现星表触碰采样,美国欧西里斯采用三自由度机械臂末端安装气吹采样头实现星表风化层采样。隼鸟1号、2号、欧西里斯号均不具备在小天体表面着陆缓冲、附着固定的能力。探测任务的科研成果在一定程度上与探测器在小天体表面停留时间成正比,另一方面与能否可靠获得小天体样品紧密相关。因此设计一种具有在小天体表面附着固定并具有采样功能的探测器平台具有重要意义。
[0003]
专利申请cn201210342842.6介绍了一种小行星取样器的自嵌入式锚固方法,该方法提出了采用切割方式实现在小行星表面的附着固定,但未对探测器的着陆缓冲及取样等关键关节进行考虑设计;专利申请cn201510861003.9介绍了一种可分离式小行星探测器,仅对探测器的组成及工作途径进行了描述,未对着陆缓冲、附着固定、取样封装等环节进行详细说明;专利申请cn201110080257.9介绍了一种小天体着陆器附着机构,其仅对着陆缓冲及附着进行了介绍,且附着采用锚固装置,不能实现在硬质岩石中的附着固定,其功能中不包含取样及封装。
技术实现要素:
[0004]
有鉴于此,本发明提供了一种腿臂复用式小天体附着取样一体化探测器,能够在小天体表面着陆缓冲、附着固定、取样、放样、封装,可用于具有着陆/固定/取样/移动等功能需求的航天器、机器人设计中。
[0005]
本发明的技术方案为:一种腿臂复用式小天体附着取样一体化探测器,包括:探测器本体、返回器、姿控发动机、机械臂和附着取样器;
[0006]
所述探测器本体外表面上均布两个以上相同的机械臂,每个机械臂一端与探测器本体固连,另一端安装有附着取样器,附着取样器能够在机械臂的驱动下进行附着和取样,且取样状态下附着取样器的底部能够附着在小天体表面;所述探测器本体的底部朝向小天体表面,顶部安装有返回器,用于收集附着取样器取样的样品;所述探测器本体的外表面上
均匀布置有一对以上姿控发动机,用于对探测器本体施加力或力矩,进而控制探测器本体的姿态。
[0007]
优选地,还包括:太阳翼3,所述探测器本体两相对侧布置有太阳翼,用于展开时吸收光能。
[0008]
优选地,所述附着取样器包括:样品封装容器、足垫、取样电机、毛刷、砂轮、破岩杆、破岩器进给丝杠、破岩器进给螺母、破岩器、破岩器进给电机、壳体、取样进给电机、磨削进给丝杠和磨削进给螺母;
[0009]
所述样品封装容器为圆环状空腔结构,其卡套在足垫的外表面上,样品封装容器的内圆周面上设有样品收集口,用于收集样品;壳体与足垫固定并连通,破岩器进给电机和取样进给电机的外壳分别固定在壳体的内壁面上;破岩器进给丝杠固定在破岩器进给电机的输出端,破岩器通过破岩器进给螺母与破岩器进给丝杠形成丝杠螺母副,破岩器端部安装有破岩杆,其作为钻头,朝向小天体表面,能够在破岩器进给电机的驱动下,随着破岩器向小天体内部钻进;磨削进给丝杠固定在取样进给电机的输出端,磨削进给丝杠和磨削进给螺母之间为丝杠螺母副配合,磨削进给螺母通过支架与取样电机的外壳固定连接,砂轮安装在取样电机的输出端,毛刷固定于砂轮的外圆周面上,取样进给电机动作能够驱动取样电机向小天体表面进给运动,并带动砂轮和毛刷随之向小天体表面进给运动;取样电机动作能够驱动毛刷与砂轮一起转动。
[0010]
优选地,所述样品封装容器底部外圆周面上设有外翻边,用于与返回器配合,以使样品封装容器与足垫单向脱离。
[0011]
优选地,所述返回器包括:上盖和返回器壳体,返回器壳体一端开口,上盖设置在返回器壳体开口端。
[0012]
优选地,所述返回器壳体中设置有:支柱、恢复弹簧和挂钩;
[0013]
两个以上支柱的一端固定在返回器壳体的内底面上,另一端分别与挂钩的一端铰接,挂钩的另一端通过恢复弹簧固定在对应支柱的中部;返回器壳体的内底面上设置有能够与样品封装容器的底部相配合的凹槽,凹槽位于两个以上支柱之间,当附着取样器在机械臂的驱动下送入返回器壳体中时,样品封装容器能够从两个以上挂钩之间压入凹槽中,且其底部的外翻边能够被挂钩卡住,从而使足垫与样品封装容器分离。
[0014]
优选地,所述样品封装容器内部设置有柔性防反弹材料。
[0015]
优选地,所述机械臂的个数为四个,每个机械臂为四自由度机械臂,通过四个机械臂的协调既能够实现探测器本体的姿态调节,又能够实现夹持固定,同时,能够在小天体表面爬行,实现换点探测。
[0016]
有益效果:
[0017]
1、本发明的一体化探测器集多个机械臂协作着陆缓冲、附着取样器固定附着取样为一体,利用腿臂复用思想(即着陆前,机械臂复用为着陆腿;缓冲和固定完成后,机械臂复用为取样臂;取样完成后,机械臂复用为放样臂),将探测器的着陆缓冲、附着固定、取样、放样、封装功能融为一体,不仅使得探测器具备了附着固定和采样功能,而且能够进行触碰取样,确保探测器未进行固定或固定失败的情况下也能够取样,多个附着取样器之间能够实现附着和取样功能互相备份,同一个附着取样器固定式取样和触碰式取样能够实现取样方式的异构备份,极大提高了一体化探测器附着的采样能力。
[0018]
2、本发明中附着取样器的具体设置,既能实现对探测器的固定,又可对小天体进行取样;既能固定取样,又能触碰取样;既具有磨削取样功能,又具有清扫取样功能,确保对特性未知介质均具有取样能力。
[0019]
3、本发明中机械臂中设置的电磁阻尼缓冲单元,能够主动控制产生缓冲阻尼,进而实现着陆腿变阻尼缓冲,相比于传统的着陆腿采用蜂窝率缓冲的方案效果更好。
[0020]
4、本发明中样品封装容器利用清扫或磨削时样品的飞溅特性进行收集,样品封装容器结构简单,内部设计有柔性防反弹材料,样品收集可靠。
[0021]
5、本发明的一体化探测器利用多自由度机械臂既能够实现探测器的姿态调节,又能够实现夹持固定,同时,利用四个机械臂之间的协调工作还能够在小天体表面爬行,实现换点探测。
附图说明
[0022]
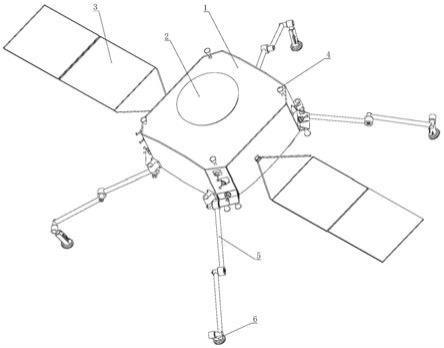
图1为本发明一体化探测器的结构示意图。
[0023]
图2为本发明附着取样器的结构示意图。
[0024]
图3为本发明返回器的结构示意图。
[0025]
图4为图3的剖视图。
[0026]
图5为本发明一体化探测器的放样状态示意图。
[0027]
其中,1、探测器本体,2、返回器,2-1、支柱,2-2、恢复弹簧,2-3、挂钩,3、太阳翼,4、姿控发动机,5、机械臂,6、附着取样器,6-1、样品封装容器,6-1-1、样品收集口,6-2、足垫,6-3、取样电机,6-4、毛刷,6-5、砂轮,6-6、破岩杆,6-7、破岩器进给丝杠,6-8、破岩器进给螺母,6-9、破岩器,6-10、破岩器进给电机,6-11、壳体,6-12、取样进给电机,6-13、磨削进给丝杠,6-14、磨削进给螺母。
具体实施方式
[0028]
下面结合附图并举实施例,对本发明进行详细描述。
[0029]
本实施例提供了一种腿臂复用式小天体附着取样一体化探测器,能够在小天体表面着陆缓冲、附着固定、取样、放样、封装,可用于具有着陆/固定/取样/移动等功能需求的航天器、机器人设计中。
[0030]
如图1所示,该一体化探测器包括:探测器本体1、返回器2、太阳翼3、姿控发动机4、机械臂5和附着取样器6;其中,机械臂5为四自由度机械臂;如图3和4所示,返回器2包括:上盖和返回器壳体,返回器壳体中设置有:支柱2-1、恢复弹簧2-2和挂钩2-3;如图2所示,附着取样器6包括:样品封装容器6-1、足垫6-2、取样电机6-3、毛刷6-4、砂轮6-5、破岩杆6-6、破岩器进给丝杠6-7、破岩器进给螺母6-8、破岩器6-9、破岩器进给电机6-10、壳体6-11、取样进给电机6-12、磨削进给丝杠6-13和磨削进给螺母6-14。
[0031]
该一体化探测器的连接关系为:探测器本体1四周均布四个完全相同的机械臂5,每个机械臂5一端与探测器本体1固连,另一端安装有附着取样器6,附着取样器6能够在机械臂5的驱动下进行附着和取样,且取样状态下附着取样器6的底部能够附着在小天体表面;探测器本体1的底部朝向小天体表面,顶部安装有返回器2,用于收集附着取样器6取样的样品;探测器本体1两相对侧布置有太阳翼3,以便于展开时能够吸收光能,进而为该探测
器供能;探测器本体1的外表面上均匀布置有四个姿控发动机4,用于对探测器本体1施加力或力矩,以便于控制探测器本体1的姿态;
[0032]
其中,机械臂5通过壳体6-11与附着取样器6固连,样品封装容器6-1为圆环状空腔结构,其套装并卡紧在足垫6-2的外表面上,样品封装容器6-1的内圆周面上设有样品收集口6-1-1,用于收集样品,样品封装容器6-1底部外圆周面上设有外翻边,用于与返回器2配合,以便于使样品封装容器6-1与足垫6-2单向脱离;壳体6-11与足垫6-2固定并连通,破岩器进给电机6-10和取样进给电机6-12的外壳分别固定在壳体6-11的内壁面上;破岩器进给丝杠6-7固定在破岩器进给电机6-10的输出端,破岩器6-9通过破岩器进给螺母6-8与破岩器进给丝杠6-7形成丝杠螺母副,破岩器6-9端部安装有破岩杆6-6,其作为钻头,朝向小天体表面,能够在破岩器进给电机6-10的驱动下,随着破岩器6-9向小天体内部逐渐钻进;磨削进给丝杠6-13固定在取样进给电机6-12的输出端,磨削进给丝杠6-13和磨削进给螺母6-14之间为丝杠螺母副配合,磨削进给螺母6-14通过支架与取样电机6-3的外壳固定连接,砂轮6-5安装在取样电机6-3的输出端,毛刷6-4固定于砂轮6-5的外圆周面上,取样进给电机6-12动作能够驱动取样电机6-3向小天体表面进给运动,并带动砂轮6-5和毛刷6-4随之向小天体表面进给运动;取样电机6-3动作能够驱动毛刷6-4与砂轮6-5一起转动;
[0033]
返回器壳体一端开口,上盖设置在返回器壳体开口端,能够实现返回器2的封装,四个支柱2-1的一端固定在返回器壳体的内底面上,另一端分别与挂钩2-3的一端铰接,挂钩2-3的另一端通过恢复弹簧2-2(其为压簧,能够被压缩,且没有压缩力时能够撑开挂钩2-3)固定在对应支柱2-1的中部;返回器壳体的内底面上设置有能够与样品封装容器6-1的底部相配合的凹槽,凹槽位于四个支柱2-1之间,当附着取样器6在机械臂5的驱动下送入返回器壳体中时,样品封装容器6-1能够从四个挂钩2-3之间被压入四个支柱2-1之间的凹槽中,且其底部的外翻边能够被挂钩2-3卡住,从而机械臂5能够将足垫6-2与样品封装容器6-1分离,使足垫6-2、壳体6-11及其内部各个部件在机械臂5的驱动下继续与下一个样品封装容器6-1套装,以便于为下一次取样做准备。
[0034]
该一体化探测器的工作原理为:如图5所示,该一体化探测器发射前,机械臂5处于折叠;着陆前,机械臂5展开为着陆构型,充当着陆腿;着陆过程中,机械臂5的上位机通过感知附着取样器6与小天体表面接触力的大小,能够协调四个机械臂5以进行自适应柔顺反驱控制,通过四个机械臂5之间的柔顺反驱控制,实现对该一体化探测器着陆能量的耗散,防止其在小天体表面反弹,实现稳定着陆;着陆完成后(可利用机械臂5之间的协作运动,对探测器本体1的姿态进行调整,调整到设定位置后每个机械臂5构型锁定),附着取样器6开始工作,破岩器进给电机6-10动作,驱动破岩器进给丝杠6-7转动,带动破岩器进给螺母6-8沿着破岩器进给丝杠6-7的轴向运动,从而带动破岩器6-9与破岩杆6-6一起向小天体表面进给、接触破碎以及向破碎点进给;其中,破岩器6-9驱动破岩杆6-6转动/振动实现对接触点的破碎;
[0035]
破岩杆6-6进入小天体表面设定深度后,四个附着取样器6的破岩杆6-6共同使探测器本体1固定于小天体表面上,固定后机械臂5上提附着取样器6,机械臂5的上位机通过感知上提过程中的力或力矩判断破岩杆6-6是否可靠固定,若可靠固定,则固定操作结束;其中,探测器本体1固定完成前,其顶部的姿控发动机4一直处于工作状态,对探测器本体1施加下压力,防止探测器本体1反弹或飘走;探测器本体1固定完成后,附着取样器6开始对
着陆点进行固定式样品采集;
[0036]
破岩杆6-6破碎过程中产生碎屑,碎屑经样品封装容器6-1上的样品收集口6-1-1进入样品封装容器6-1内部,能够实现碎屑样品的收集;此外,探测器本体1固定完成后,毛刷6-4和砂轮6-5在取样进给电机6-12、磨削进给丝杠6-13、磨削进给螺母6-14共同作用下产生朝向小天体表面的进给运动(具体为:取样进给电机6-12动作,带动磨削进给丝杠6-13转动,从而通过磨削进给螺母6-14推动取样电机6-3、毛刷6-4和砂轮6-5向小天体表面进给),取样电机6-3能够驱动毛刷6-4与砂轮6-5一起转动,旋转的毛刷6-4和砂轮6-5能够对固定点进行磨削或清扫,其中,毛刷6-4能够对固定点风化层进行清扫取样,砂轮6-5能够对固定点硬度高的介质进行磨削取样;
[0037]
样品封装容器6-1取样完成后,破岩杆6-6在破岩器进给电机6-10的反向驱动下收回,与小天体表面解除固定关系,机械臂5将附着取样器6送到返回器2的上方,返回器开盖,附着取样器6的样品封装容器6-1被机械臂5压入返回器2内底面的凹槽中,在支柱2-1、恢复弹簧2-2、挂钩2-3作用下,样品封装容器6-1与足垫6-2脱开并被限位在返回器2内底面的凹槽中,实现了样品封装容器6-1在返回器2内部的单向剥离,即完成放样,随后该机械臂5复位,带动与其对应的足垫6-2或另外三个机械臂5中的一个机械臂5对应的足垫6-2套装在下一个样品封装容器6-1,以便于为下一次取样做准备;
[0038]
该一体化探测器还能够利用附着取样器6对小天体表面进行触碰式取样,此时,探测器本体1未进行固定或固定失败,为了确保能收集到样品,触碰式取样前,四个机械臂5展开,探测器本体1在姿控发动机4的作用下逐渐靠近小天体表面,直至附着取样器6与小天体表面接触,接触后,一个以上机械臂5末端的附着取样器6内部的毛刷6-4和砂轮6-5高速转动,高速转动的毛刷6-4和砂轮6-5对接触点进行清扫和磨削,清扫和磨削的样品被送入样品封装容器6-1内部;随后该一体化探测器飞离小天体,机械臂5将样品封装容器6-1放入返回器2内部,完成触碰式取样。
[0039]
进一步地,该一体化探测器可利用机械臂5在小天体表面进行爬行换点探测。
[0040]
进一步地,样品封装容器6-1内部设置有柔性防反弹材料,防止进入样品封装容器6-1内的样品反弹出去。
[0041]
进一步地,四个机械臂5之间的协调动作能够实现对凸起地形的夹持,进而实现对该一体化探测器的固定。
[0042]
进一步地,四个机械臂5之间的协调动作能够对探测器本体1提供一定的推力,从而辅助该一体化探测器飞离小天体表面,达到节省燃料的目的。
[0043]
进一步地,该一体化探测器取样时,每个着陆点可采用一个附着取样器6进行取样,也可用两个以上附着取样器6进行取样;两个以上着陆点分别采用一个附着取样器6进行取样时,能够保证各个着陆点的样品独立封装。
[0044]
进一步地,机械臂5能够根据地形主动调节着陆构型,地形适应性强;机械臂5通过柔顺控制可实现着陆时的主动电磁阻尼缓冲,缓冲效果好;电磁缓冲阻尼可重复使用,使得该探测器可进行多点多次附着取样。
[0045]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1