带故障自诊断的水产养殖用超声波水位检测方法与装置与流程
[0001]
本发明涉及水产养殖和检测领域,具体是采用超声波技术对养殖池水位进行检测的装置和方法。
背景技术:
[0002]
在水产养殖过程中,对养殖池水位的实时监控至关重要。养殖池的水位高低影响了水底各个区域的温度,在自动化养殖环境中,水位检测的故障会导致水位不合理,降低各类水产品的产量。更严重的情况,一旦水位检测设备发生故障,测量的水位完全错误导致整个系统出错,水位控制过低会放空水池造成水产品大面积死亡,形成不可挽救的损失。
[0003]
现有的水产养殖水位检测一般都采用浮球式检测方法,例如中国专利号为201720681384.7文献中公开的水位装置是通过传感器检测浮球和铁块的位置来判断水位高低。中国专利号为201810615020.8文献中公开的装置是通过浮球和配套的机械结构完成对水位的控制。浮球式水位检测装置不具备自动检测故障的功能,装置长期运行在室外环境避免不了设备老化和损坏,发生故障将造成养殖池水位失控。
[0004]
超声波水位检测相较于传统的浮球式检测方法,具有不用直接接触,减少设备损耗,抗干扰能力强等优点。超声波水位不仅测量准确还可连续测量和详细记录水位高度,大大提高了监测的科学性。在水产品养殖基地,超声波装置大多数被安装在恶劣的室外环境下,经过长时间的阳光暴晒、风雨洗礼,极有可能造成内部电路的干扰甚至损坏。现有的超声波装置只具备运行电路异常报警功能,但不能判断测距功能是否正常。在自动化水产养殖系统中,整个水位控制系统没有人为干预,一旦超声波设备死机或者检测探头失灵,检测水位会一直保持不变,系统识别不了故障依旧照常运行。如果测量水位远远高于实际水位,自动养殖系统将会不断放水,当养殖池水位放空时,水产品会缺水死亡。如果测量水位远低于实际水位,自动养殖系统会不断给养殖池加水,水位过高会溢出养殖池,水产品将大量丢失。因此,设计一种具备故障自检测的超声波水位检测装置来防止自动养殖系统水位失控的情况极为重要。
技术实现要素:
[0005]
在现有技术存在不能自动检测水位测量故障的背景下,本发明提供一种带有自动检测故障功能的超声波水位检测方法与装置,在不改变现有测距装置结构的基础上实现故障自检测功能,保证了每次测距的准确性。
[0006]
为实现上述目的,本发明带故障自诊断的水产养殖用超声波水位检测装置所采用的技术方案是:水产养殖池塘的岸边固定垂直杆的下端,垂直杆上端固定连接一根水平空心杆的一端,水平空心杆的另一端延伸在水产养殖池塘的上方,水平空心杆的另一端设有超声波探头和控制器,水平空心杆的中间位置固定连接垂直固定杆的上端,垂直固定杆的下端固定一个水平支撑板,水平支撑板的上表面上装有舵机,舵机的输出轴同轴连接下方的舵盘,舵盘固定连接下方的金属探测板;金属探测板是长方形的板状,在偏向一端板面处
连接舵盘,超声波探头在金属探测板的上方;控制器经控制线分别连接超声波探头和舵机所述的带故障自诊断的水产养殖用超声波水位检测装置的检测方法所采用的技术方案是包括以下步骤:步骤a:控制器控制超声波探头发送测距声波,当前时间为t1,测距声波撞击水产养殖池塘的水面后反弹被超声波探头接收,当前时间为t2,计算出水位深度h=h-v(t2-t1)/2,h为超声波探头距离水产养殖池塘池底的距离,v是超声波传播速度;步骤b:控制器控制舵机顺时针转动固定角度90度,使金属探测板旋转至超声波探头下方且遮挡超声波探头的测量路径,控制超声波探头发送测量信号,测量到超声波探头到金属探测板的测量距离d;控制器控制舵机逆时针转动90度,带动金属探测板归位;步骤c:控制器将测量距离d与超声波探头和金属探测板之间的实际垂直距离l作比较,判断比较的差值是否在设定的误差范围,超过误差范围时则测距发生故障,如果没有超过误差范围,则水位深度h为准确水位数据。
[0007]
本发明与已有技术相比,具有如下优点:1、本发明检测装置实现了超声波水位检测的故障自诊断功能,避免检测装置发生死机导致液位检测值不变从而发生水产品大量死亡的现象。
[0008]
2、本发明在每次完成水位检测之后,控制器驱动舵机,通过舵机带动金属探测板转动到超声波探头下方,进行固定距离检测来判断检测装置是否发生故障,实现检测装置是否发生故障的诊断功能,保证了每次测距的准确性,有效弥补了人工定期检测的低效率和实时性差等问题。
[0009]
3、本发明检测装置由于没有对原有超声波探头做任何改装,适用于各种精度和外形的超声波设备,而且保护壳的可拆装结构易于检修和更换不同设备。4、本发明检测装置中的控制器通过无线通讯模块与上位机连接,能实现异地监测和控制。
[0010]
3、考虑到使用寿命和故障几率,本发明检测装置加装了金属舵机保护壳和金属控制器保护壳来阻挡外界对设备的破坏和干扰。
附图说明
[0011]
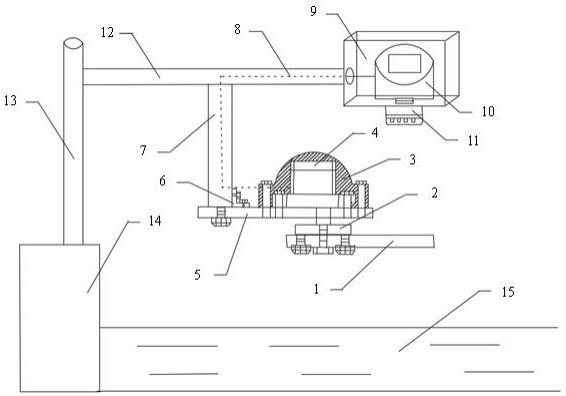
图1是本发明带故障自诊断的水产养殖用超声波水位检测装置的结构示意图;图2是图1中垂直固定杆7、水平支撑板5和金属舵机保护壳3的装配结构放大图;图3是图1中是舵机4的仰视放大图;图4是图1中舵盘2的俯视放大图;图5是图1中金属探测板1的俯视放大图;图6是图1所示超声波水位检测装置的检测方法流程图。
[0012]
图中:1.金属探测板;2.舵盘;3.金属舵机保护壳;4.舵机;5.水平支撑板;6.l型固定支架;7.垂直固定杆;8.舵机控制线;9.金属控制器保护壳;10.控制器;11.超声波探头;12.水平空心杆;13.垂直杆;14.岸边;15.水产养殖池塘;101.中心螺丝孔;102.固定螺丝孔;201.中心通孔;202.固定螺丝孔;206.母齿;301.固定螺丝;401、402.固定螺丝孔;403.固定螺丝孔;404.舵机输出轴;405.公齿;501.固定螺丝。
具体实施方式
[0013]
参见图1-2,本发明带故障自诊断的水产养殖用超声波水位检测装置安装在水产养殖池塘15的岸边14,在岸边14加装垂直杆13,垂直杆13的下端固定在岸边14,垂直杆13的上端通过焊接固定连接一根水平空心杆12的一端,水平空心杆12的另一端延伸在水产养殖池塘15的上方。水平空心杆12保持水平位置,确保超声波探头11处于垂直位置。在水平空心杆12的另一端处设有超声波探头11和控制器10,控制器10装在金属控制器保护壳9内部,水平空心杆12的另一端通过焊接固定连接金属控制器保护壳9,金属控制器保护壳9对控制器10起保护作用。控制器10下方的安装超声波探头11,控制器10控制线连接超声波探头11,超声波探头11伸出在金属控制器保护壳9的外部下方,使金属控制器保护壳9和超声波探头11形成一体。保持金属控制器保护壳9在上下面水平位置,确保超声波探头头11在垂直状态,确保水位测量准确。在水平空心杆12的中间位置固定连接垂直固定杆7的上端,垂直固定杆7的下端由固定螺丝501固定一个水平支撑板5,垂直固定杆7和水平支撑板5在水平空心杆12的下方,在水平支撑板5和垂直固定杆7的连接处加装l型固定支架6,保证两者的稳固。
[0014]
在水平支撑板5的上表面安装舵机4,舵机4外部罩着一个金属舵机保护壳3,金属舵机保护壳3由两侧的固定螺丝301固定安装在水平支撑板5上,金属舵机保护壳3对核心部件舵机4进行保护。在水平支撑板5的下方是舵盘2和金属探测板1,舵机4的输出轴同轴固定连接下方的舵盘2,舵盘2连接下方的金属探测板1,使舵机4经舵盘2连接金属探测板1,带动金属探测板1转动。
[0015]
水平支撑板5在超声波探头1的下方但不能遮挡超声波探头11的正常测量。但金属探测板1旋转后要能遮挡超声波探头11的正常测量,金属探测板1安装后处于水平位置,超声波探头11的水平长度是固定的,确保其水平长度足够能够遮挡超声波探头11的检测路径。
[0016]
垂直固定杆7的垂直长度决定超声波探头11和探测板1之间的垂直距离l,超声波探头11和金属探测板1之间的实际垂直距离为l,固定不变。
[0017]
金属控制器保护壳9和水平空心杆12连接处开有圆形小孔,连接于控制器10的舵机控制线8,穿过水平空心杆12、垂直固定杆7、金属舵机保护壳3与舵机4相连,实现控制器10对舵机4的控制。同时,控制器10还经控制线连接超声波探头11,控制超声波探头11的工作,控制器10还经无线通讯模块连接上位机,将其处理结果传送到上位机。
[0018]
如图3所示,舵机4经两侧的固定螺丝孔401、402固定在支撑板5上。舵机4的输出轴404侧壁上设有一圈公齿405,正中间开有固定螺丝孔403。如图4所示,舵盘2是圆盘开状,其中心通孔201与舵机输出轴404上的固定螺丝孔403同轴心,舵盘2的内壁上设有一圈母齿206,当舵机4与舵盘2连接时,通过舵机输出轴404上的公齿405与舵盘2上的母齿206相啮合。在舵盘2的盘面上开有几个固定螺丝孔202,通过固定螺丝孔202连接其下方的金属探测板1。如图5所示,金属探测板1是长方形的板状,在偏向一端的板面上开有中心螺丝孔101,该中心螺丝孔101与舵盘2的中心通孔201以及舵机输出轴404上的固定螺丝孔403同轴心,在中心螺丝孔101四周开有几个固定螺丝孔102,该固定螺丝孔102与舵盘2的盘面上的固定螺丝孔202相对应,用于将金属探测板1和舵盘2两者固定连接。金属探测板1、舵盘2、舵机4的中心由一个螺丝依次穿过固定螺丝孔102、中心通孔201固定螺丝孔403自下而上固定连接在一起。当舵机4运行时,舵机输出轴404转动,依靠公齿405带动母齿206,母齿206与舵盘
2同时转动,从而由舵盘2再带动与之固定连接的金属探测板1转动,使金属探测板1改变位置,金属探测板1在偏向一端板面处连接舵盘2,偏向另一端处能遮挡上方的超声波探头11。由于金属探测板1是长方形结构,所以其转动后共有两个位置,两个位置相差90度,一个位置处于超声波探头11的正下方遮挡超声波探头11,由于金属探测板1和超声波探头11的实际垂直距离l是固定的,所以可以通过比较固定距离l和超声波探头11测量的水位距离来确认是否发生故障。金属探测板1另外一个位置是超声波探头11再顺时针旋转90度,这个位置让开超声波探头11,不会遮挡超声波探头11的正常水位测量。
[0019]
参见图1-6所示,本发明带故障自诊断的水产养殖用超声波水位检测装置工作时,由上位机发送超声波检测命令,命令经过控无线通讯模块发送给控制器10,并判断是否是检测水位命令,如果是检测命令,控制器10接收到测距命令后,控制超声波探头11进行水位检测,如果不是检测命令,则不操作继续等待。
[0020]
控制器10进行水位检测时,控制超声波探头11发送一次测量信号,即发送测距声波,同时记录下当前时间t1,发送的测距声波撞击水产养殖池塘15的水面后反弹被超声波探头11接收,立刻记录下当前时间t2。根据超声波的传播速度v可以计算出目前水位的深度h,计算公式为:h=h-v(t2-t1)/2,其中,h为超声波探头1距离水产养殖池塘15池底的距离,在检测之前预先测量到,是固定距离。计算完成后控制器10保存该次测量的水位深度h,完成了正常水位测量。水位深度h这一数据表明检测装置内部的电路正常没有异常情况,但并不能判断测距功能是否正常,因此需要判断此次测量数据是否准确。
[0021]
在完成正常水位测量后,设备进行故障自检测,如果先进行故障检测再进行水位测量可能会发生在操作过程中装置发生故障的情况,造成误判。首先,控制器10控制舵机4运行,顺时针转动固定角度90度,使金属探测板1旋转固定角度至超声波探头11下方,遮挡超声波探头11的测量路径,确保此次测量的是超声波探头11到金属探测板1之间的距离。控制器10控制超声波探头11发送一次测量信号,测量到超声波探头11到金属探测板1的测量距离为d。控制器10控制舵机逆时针转动90度,带动金属探测板1归位,使金属探测板1不再阻挡超声波探头11对水位的测量,以便下一次正常水位测量。
[0022]
控制器10将测量距离d与超声波探头11和金属探测板1之间的实际垂直距离为l作比较,判断比较的差值是否在设定的误差范围,一旦超过误差范围,则说明装置测距发生故障,控制器10点亮故障灯并通过无线通讯模块发送故障信息进行故障警报,等待处理。如果没有超过误差范围,说明水位检测正常,之前测到的水位深度h即为准确数据,将水位深度h上传至上位机,上位机接收以后保存到数据库并实时显示,供检测人员观察。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1