基于平行光管的星图匹配半实物验证方法
1.本发明属于星图匹配算法正确性研究领域,特别涉及一种基于平行光管的星图匹配半实物验证方法。
背景技术:
2.在飞行器的飞行过程中,需要对飞行器的三轴姿态进行测量与校正,以保证飞行器的平稳飞行。目前主流的姿态测量装置有太阳敏感器、地磁敏感器、星敏感器三种。其中星敏感器较其他两种敏感器,测量精度最高,因此被广泛使用。
3.星敏感器内部的电子学系统包括:成像单元、数据处理单元、协议处理单元、供电单元。其中数据处理单元主要涉及星点像素的提取、星点质心的求取、星图匹配算法的设计以及坐标系变换关系。星敏感器的精度主要受星点质心的求取以及星图匹配算法的准确性影响较多。
4.为了保证星图匹配算法的正确性以及提升精度,在将算法写入嵌入式系统之前,需要进行严格的验证。目前主流的验证方法是利用给定的视轴和视场大小计算出视场内的恒星,得出恒星在图片中的成像位置,之后根据成像位置绘制星点模拟图,最后处理图像,得出匹配到的恒星在星库中的星号进行结果验证。但模拟出的单颗星星点像素以及对应的灰度值和真实情况相差较大,因此单纯靠仿真来验证算法的正确性说服力不足。
技术实现要素:
5.本发明的目的在于针对上述现有技术存在的问题,提供一种基于平行光管的星图匹配半实物验证方法,使用平行光管模拟出无穷远处的星点,结合真实的相机进行拍摄,达到与真实情况相差较小的地步,提高星图匹配算法验证方法的说服力。
6.实现本发明目的的技术解决方案为:一种基于平行光管的星图匹配半实物验证方法,所述方法包括以下步骤:
7.步骤1,基于tycho2星库,以恒星星等为条件筛选恒星,构建新的星库;
8.步骤2,从新的星库中随机挑选出满足相机视场大小的三颗恒星,并记录三颗恒星两两之间的角距;
9.步骤3,利用平行光管模拟出无穷远处恒星发出的单一点光源;
10.步骤4,基于所述单一点光源和三颗恒星两两之间的角距,利用经纬仪模拟出所述三颗恒星,之后利用相机拍摄模拟出的恒星;
11.步骤5,利用拍摄的图片验证星图匹配算法的正确性。
12.本发明与现有技术相比,其显著优点为:
13.对比真实拍摄星空图,优点为:1)不受拍摄时间的限制。由于本发明方法是室内的半实物验证方法,所以不必等到夜晚天空中有星星时才能进行拍摄验证。2)不受气节和天气的影响。拍摄真实星空图像时,由于在地表进行拍摄,会受到云层、光污染等外界的影响,无法达到在飞行器上进行拍摄的效果。而本发明完全可以避免这些影响,拍摄出更接近于
实际的星空图像。3)不受拍摄地点的影响。相比于真实拍摄条件下某一时刻只能定点的拍摄头顶星空图像。本发明方法可以模拟出任意拍摄地点头顶的星空图像,验证更全面。
14.对比纯仿真模拟星空图,优点为:1)拍摄平行光管发射出的点光源形成的像素点个数更接近于实际拍摄情况。纯仿真条件下,模拟出某个恒星所占的像素点个数仅为十几个,与真实条件下相差较多。拍摄平行光管发出的点光源形成的亮点所占像素点个数为50~100个,与真实条件相差较小。2)可以通过调节相机光圈达到模拟出星等差异的情况。纯仿真条件下,星等条件无法充分使用得当。本方法提供的半实物仿真可以模拟出星等差异条件。
15.下面结合附图对本发明作进一步详细描述。
附图说明
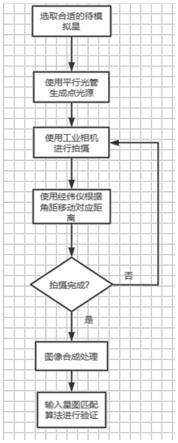
16.图1为一个实施例中基于平行光管的星图匹配半实物验证方法的流程图。
17.图2为一个实施例中平行光管整体图。
18.图3为一个实施例中平行光管工作原理图。
19.图4为一个实施例中星敏感器坐标系示意图。
20.图5为一个实施例中像平面坐标系示意图。
具体实施方式
21.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
22.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
23.另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
24.在一个实施例中,提供了一种基于平行光管的星图匹配半实物验证方法,所述方法包括以下步骤:
25.步骤1,基于tycho2星库,以恒星星等为条件筛选恒星,构建新的星库;
26.步骤2,从新的星库中随机挑选出满足相机视场大小的三颗恒星,并记录三颗恒星两两之间的角距;
27.其中角距(α)指的是在坐标系下,两个恒星各自在坐标系中的两个矢量(两个矢量的起点都是坐标系原点)形成的夹角度数。该度数不会随着星点在图片中的位置不同而发生改变。
28.步骤3,利用平行光管模拟出无穷远处恒星发出的单一点光源;
29.这里,结合图2,本发明所采用的平行光管包括以下结构装置:
30.表1平行光管整体结构
31.1可换分划板座2镜管3物镜座4光源5调焦座6调焦筒紧锁螺钉7调整支架
32.仪器的主要组成部分有带框物镜、带调整支座的镜管、各类不同的分划板以及带不同颜色滤光片的照明器等。全套分划板包括:a)十字分划板;b)玻罗板;c)分辨率板;d)星点板。
33.分划板能方便地更换,且定位可靠。分划板的中心在出厂前已经经过严格的校正。镜管内壁涂黑色消光漆并且装有消光光栏,它能有效地防止漫射光的干扰,以使物镜成像质量不收损害。镜管后部有供调焦用的移动机构,当仪器有视差或者使用不同颜色的滤光片时,可方便地得以调节。
34.结合图3,是平行光管的工作原理图。作为目标的分划板被光源3-1通过各色滤光片3-2均匀的照明,如果分划板3-3正确地位于物镜3-4的焦平面上,那么从物镜射出的光即为平行光束,亦即相当于来自无穷远的光束。
35.本发明中使用的分划板是星点板,经过实际的拍摄并处理后,可以得出一个φ0.1(直径0.1mm)的星点板所占像素点的个数为50~100个,基本满足真实条件下的要求。
36.步骤4,基于所述单一点光源和三颗恒星两两之间的角距,利用经纬仪模拟出所述三颗恒星,之后利用相机拍摄模拟出的恒星;
37.步骤5,利用拍摄的图片验证星图匹配算法的正确性。
38.进一步地,在其中一个实施例中,步骤1所述基于tycho2星库,以恒星星等为条件筛选恒星,构建新的星库,具体过程包括:
39.步骤1-1,从tycho2星库中提取恒星的赤经、赤纬和星等信息;
40.步骤1-2,提取出星等小于预设阈值t的恒星,构建第一星库;
41.这里优选地,所述预设阈值t为6.0。
42.步骤1-3,分别以第一星库中的每一个恒星为主星,计算其与其他每个副星之间的角距,记录角距满足相机视场大小的副星,构建第二星库作为最终的新的星库。
43.进一步地,在其中一个实施例中,步骤4所述基于所述单一点光源和三颗恒星两两之间的角距,利用经纬仪模拟出所述三颗恒星,之后利用相机拍摄模拟出的恒星,具体过程包括:
44.假设步骤2中三颗恒星的星号为1、2、3;
45.步骤4-1,确定相机的像平面坐标系如图5所示,该坐标系以感光面的左上角顶点oj为坐标原点,原点从左向右的水平方向为x轴,从上向下的垂直方向为y轴,记为ojxy坐标系;
46.步骤4-2,将模拟的星点调整至像平面坐标系的中心位置,拍摄一张图片,假设中
心位置的星点星号为1,并记录下此时经纬仪的经纬度;之后向左转动经纬仪,转动的角度为星号为1的恒星和星号为2的恒星之间的角距jj_1_2,则单一的点光源会在像坐标系中向右移动jj_1_2度,此时拍摄下图片,假设此时图片中的星点是星号为2的恒星形成的图像,记录下此时经纬仪的经纬度;
47.步骤4-3,将经纬仪回退到星号1对应的经纬度,然后将经纬仪向上、下、左、右四个方向各移动jj_1_3度,jj_1_3为星号为1的恒星和星号为3的恒星之间的角距;在每次移动后拍摄图片,且每次拍摄完成后都需要先回退到星号1对应的经纬度,才能进行下次移动;
48.步骤4-4,将经纬仪移动到星号2对应的经纬度,然后将经纬仪向上、下、左、右四个方向各移动jj_2_3度,jj_2_3为星号为2的恒星和星号为3的恒星之间的角距;在每次移动后拍摄图片,且每次拍摄完成后都需要先回退到星号2对应的经纬度,才能进行下次移动。
49.进一步地,在其中一个实施例中,步骤5所述利用拍摄的图片验证星图匹配算法的正确性,具体过程包括:
50.步骤5-1,对步骤4拍摄的图片进行合成,获得一张合成后的图片;
51.步骤5-2,在合成后的图片上,以星号1在图片上形成的光点为圆心,以jj_1_3为半径绘制一个圆;再以星号2在图片上形成的光点为圆心,以jj_2_3为半径绘制一个圆;
52.步骤5-3,求取两个圆的相交位置即星号3在图片中形成的光点位置;特殊地,两个圆可能存在两个交点,任取其中一个交点作为光点位置;
53.步骤5-4,将图片中除星号1、星号2、星号3之外的其他光点全部去除;
54.步骤5-5,将步骤5-4处理后的图片输入星图匹配算法,求解出在所述新的星库中匹配的三颗恒星;
55.步骤5-6,判断步骤5-5求解出的三颗恒星是否与步骤2中挑选出的三颗恒星一致,若一致,则表明星图匹配算法正确,否则表明不准确。
56.这里,利用星图匹配算法求解时,会涉及到坐标系的转换,从像平面坐标系转换至星敏感器坐标系。结合图4,星敏感器坐标系为:以星敏感器的投影中心o(即成像器件的光心)为坐标原点,其到成像平面的距离为焦距f,星敏感器坐标系的横轴xj轴和像平面坐标系的x轴同向,纵轴yj轴与像平面坐标系的y轴同向。zj为光轴,整个星敏感器坐标系记为oxjyjzjo。显然星敏感器坐标系下,星点竖坐标zj值都等于-f。
57.假设模拟出的星点为s,其理想成像为s',则当已知它在星敏感器坐标系中的坐标(xb,yb,-f)时,可以计算出观测星在星敏感器坐标系中的方向余弦矢量为:
[0058][0059]
式中,v
x
、vy、vz为某个恒星在星敏感器中的三轴分量,f为相机的焦距,xb为成像点在像平面坐标系下的横轴坐标,yb为成像点在像平面坐标系下的纵轴坐标。
[0060]
本发明使用平行光管模拟出无穷远处的星点,结合真实的相机进行拍摄,达到与真实情况相差较小的地步,提高了验证星图匹配算法的方法的说服力。
[0061]
以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进
都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1