一种利用入瞳差分平场矫正检测镜头洁净度的方法与流程
[0001]
本发明涉及镜头检测方法,具体涉及一种利用入瞳差分平场矫正检测镜头洁净度的方法。
背景技术:
[0002]
洁净度是成像系统重要指标,直接关系到杂散光,鬼像,均匀性等成像关键因素。在镜头的制造过程中,表面缺陷的产生往往是不可避免的。一般而言,表面缺陷是产品表面局部物理或化学性质不均匀的区域,如夹杂、破损、污点等等,其会对产品的清洁度带来不良影响。因此,生产企业对镜头的清洁度检测非常重视,通过及时发现镜头的表面缺陷,有效控制产品质量,根据检测结果进一步分析生产工艺中存在的某些问题,从而杜绝或减少缺陷品的产生。
[0003]
成品镜头洁净度的检测,目前以目视为主,该方法存在抽检率低、准确性不高、实时性差、效率低、劳动强度大的缺点,且受限于检测员的工作经验、工作状态,而基于机器视觉的检测方法可以很大程度上克服上述弊端。
[0004]
机器视觉是一种无接触、无损伤的自动检测技术,是实现设备自动化、智能化和精密控制的有效手段,具有安全可靠、可在恶劣环境下长时间工作和生产效率高等突出优点。机器视觉检测系统通过适当的光源和图像传感器(ccd摄像机)获取产品的表面图像,利用相应的图像处理算法提取图像的特征信息,然后根据特征信息进行表面缺陷的定位、识别、分级等判别和统计、存储、查询等操作;视觉表面缺陷检测系统基本组成主要包括图像获取模块、图像处理模块、图像分析模块、数据管理及人机接口模块。
[0005]
图像获取模块由ccd摄像机、光学镜头、光源及其夹持装置等组成,其功能是完成产品表面图像的采集。在光源的照明下,通过光学镜头将产品表面成像于相机传感器上,光信号先转换成电信号,进而转换成计算机能处理的数字信号。目前工业用相机主要基于ccd或cmos(complementary metal oxide semiconductor)芯片的相机。ccd是目前机器视觉最为常用的图像传感器。光源直接影响到图像的质量,其作用是克服环境光干扰,保证图像的稳定性,获得对比度尽可能高的图像。目前常用的光源有卤素灯、荧光灯和发光二级管(led)。led光源以体积小、功耗低、响应速度快、发光单色性好、可靠性高、光均匀稳定、易集成等优点获得了广泛的应用。
[0006]
由光源构成的照明系统按其照射方法可分为明场照明与暗场照明、结构光照明与频闪光照明。由于明场信号本身带有大角度视场相对照度的信息,其会对成像效果产生不可忽视的影响,而如何抑制大角度视场低相对照度的影响,放大待检测杂质的可观测范围,进而有效提高杂质的检测效率,是目前本领域研究的重点。
技术实现要素:
[0007]
发明目的:针对现有技术存在的杂质可观测范围小、杂质检测效率低的问题,本发明的目的是提供一种利用入瞳差分平场矫正有效提高杂质检测效率的镜头洁净度检测方
法。
[0008]
技术方案:本发明所述的利用入瞳差分平场矫正检测镜头洁净度的方法,包括如下步骤:
[0009]
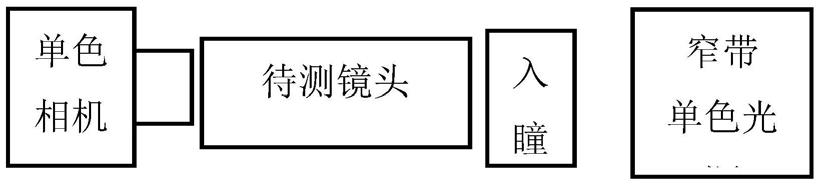
(1)搭建平场测试光路,所述平场测试光路包括光源、待测镜头和单色相机,优选的,所述光源为窄波段均匀面光源;将单色相机的感光面垂直于待测镜头的镜头光轴放置,并平移至待测镜头的出光位置;
[0010]
定义明场数据是视场中心最亮处值是饱和值的80%~90%时的数据,暗场数据是没有信号输入时的数据;固定曝光时间,调整光源亮度,进行明场、暗场图像数据采集。
[0011]
(2)在待测镜头和单色相机之间,设有可调入瞳,根据光源的调节范围,确定入瞳孔径的取值范围,选取不同孔径入瞳,测量不同孔径入瞳下的明场图像数据和暗场图像数据,所选取的若干入瞳的孔径均匀分布在所述取值范围内;可选的,入瞳位置在镜头外侧,或镜头内置可调入瞳。
[0012]
(3)针对每个像素,进行入瞳差分平场校正运算:
[0013]
p
i
p
j
入瞳差分=(入瞳p
i
的明场数据-入瞳p
i
的暗场数据)/(入瞳p
j
的明场数据-入瞳p
j
的暗场数据);
[0014]
其中,p
i
、p
j
分别是两种不同的入瞳,i∈[1,n],j∈[1,n];p是入瞳的个数;
[0015]
(4)将各个像素的入瞳差分结果的矩阵以图像形式显示,进行镜头洁净度的判断。
[0016]
进一步的,步骤(2)中,不同入瞳的暗场图像数据分别采集,即针对多个入瞳,单独测量每个入瞳下的暗场图像数据,获取每个像素在各个入瞳下的明场图像数据和暗场图像数据。
[0017]
进一步的,步骤(3)中,包括入瞳p1、入瞳p2、入瞳p3、
……
入瞳p
n-1
、入瞳p
n
,所述入瞳差分平场校正运算遍历上述n个入瞳的两两差分组合,获得n
×
(n-1)种入瞳差分组合。
[0018]
有益效果:与现有技术相比,本发明具有如下显著效果:1、检测过程中,整个光学系统并没有发生移动,只有入瞳大小发生了变化,适用于入瞳位置在镜头外侧,或镜头内置可调入瞳的情况。2、可以抑制大角度视场低相对照度的影响,提高大视场范围的信噪比,对杂质成像进行边缘增强。3、放大了待检测杂质的可观测范围。4、不同入瞳在ccd的成像偏移有一个确定的模式,差分后杂质成像的偏移相对光学中心成对称分布,统一了杂质的可观测模式,最小可分辨尺寸为探测器像素大小(um量级)。
附图说明
[0019]
图1为入瞳差分平场矫正测试系统图;
[0020]
图2为本发明实施例中三种入瞳的差分平场矫正结果的图像显示。
具体实施方式
[0021]
下面结合附图和具体实施例,详细阐述本发明的技术方案。
[0022]
一种利用入瞳差分平场矫正检测镜头洁净度的方法,包括如下步骤:
[0023]
步骤一、搭建平场测试光路,包括窄波段的均匀面光源,待测镜头,以及满足分辨率要求的单色相机。
[0024]
其中,相机像素大小是影响探测杂质尺寸的精度的主要因素,相机分辨率是影响
探测范围的主要因素,因此,需根据检测精度确定满足分辨率要求的单色相机。
[0025]
本实施例中,窄波段均匀面光源采用8英寸单色积分球,中心波长在520nm,半峰值宽度20nm。
[0026]
将待测镜头固定,本实施例采用视场角为120*120deg的大视场镜头,以v型块工装固定。
[0027]
将相机感光面垂直镜头光轴放置,并平移至所需检测的镜头出光位置。本例中相机采用像素大小5.5um,像素数8000*6000的感光面,放置在镜头后焦面。
[0028]
步骤二、将入瞳放置在待测镜头前方,测量该入瞳下的明场、暗场图像数据。
[0029]
定义明场数据是视场中心最亮处值是饱和值的80%~90%时的数据,暗场数据是没有信号输入时的数据。测量方法为,固定曝光时间,调整光源亮度使相机输出在于其范围内,即可进行图像数据采集。不同入瞳下的暗场图像数据分别采集,提高数据准确性。
[0030]
通过有效利用测试系统光源的调节范围,确定入瞳孔径的选取,孔径尺寸不宜过大,所选取的入瞳的数量和孔径应均匀分布在可选范围内,此处不再详细解释。
[0031]
本实施例中,入瞳a为孔径为3mm的小孔。待测镜头的设计入瞳位置在镜头前端面外侧,镜头外筒设计留有安装螺纹,可将入瞳a的小孔旋转安装在设计指定位置。
[0032]
本例中,固定相机曝光时间50ms,调整积分球输出520nm单色g光,输出量调整至0nits,即没有光输出,相机采集图像,作为暗场数据。调整积分球,输出520nm单色g光,输出量在50nits时,相机中心roi,本例中相机中心1000*1000像素平均值为最大量程的80%,本例中的相机工作在12位模式下,即平均灰度值在3300左右,采集图像,作为明场数据。
[0033]
步骤三、更换光学系统的入瞳,重复步骤二,测量不同入瞳下的明场、暗场图像数据。
[0034]
一般来讲,一个光学系统的暗场数据是通用的。本方案中,涉及到了光学系统入瞳的切换,为消除潜在负面影响,每切换一次入瞳,都单独进行一次暗场数据测量。
[0035]
测量步骤与上述入瞳a类似。将积分球固定相机曝光时间50ms,更换入瞳b,其小孔直径为5mm,调整积分球输出量,采集暗场和明场数据。
[0036]
更换入瞳c,其小孔直径为6mm,调整积分球输出量,采集暗场和明场数据。
[0037]
步骤四、针对各入瞳明场图像数据、暗场图像数据,分别用其他入瞳下的明场、暗场数据进行平场矫正运算。
[0038]
具体运算方法如下:
[0039]
p
i
p
j
入瞳差分=(入瞳p
i
的明场数据-入瞳p
i
的暗场数据)/(入瞳p
j
的明场数据-入瞳d
j
的暗场数据);
[0040]
其中,p
i
、p
j
分别是两种不同的入瞳,i∈[1,n],j∈[1,n];p是入瞳的个数;
[0041]
对于入瞳p1、入瞳p2、入瞳p3、
……
入瞳p
n-1
、入瞳p
n
等n种入瞳,最多有n*(n-1)种入瞳差分组合,如表1所示:
[0042]
表1入瞳差分平场矫正的组合排列
[0043] 入瞳p1入瞳p2入瞳p3入瞳p4...入瞳p
n
入瞳p1(空)p1p2差分p1p3差分p1p4差分...p1p
n
差分入瞳p2p2p1差分(空)p2p3差分p2p4差分...p2p
n
差分入瞳p3p3p1差分p3p2差分(空)p3p4差分...p3p
n
差分
入瞳p4p4p1差分p4p2差分p4p3差分(空)...p4p
n
差分...............(空)...入瞳p
n
p
n
p1差分p
n
p2差分p
n
p3差分p
n
p4差分...(空)
[0044]
不同入瞳组合得到结果,因杂质的物理性质,包括并不限于尺寸,三维形状,透过率,折射率等而有差异,因此遍历各种入瞳组合,丰富探测信息,提高判断效率。
[0045]
本实施例中,通过上述步骤一至步骤三,分别得到abc三种入瞳的明场以及暗场共六组数据,即相机每个像素都有对应的独立于其他像素的六个数据,这些数据是以矩阵的形式存在的。针对每个像素,进行平场校正运算,每个像素的数据处理过程是独立的,不同像素之间数据没有相互影响。得到如下六种差分运算结果:
[0046]
ab入瞳差分结果=(a入瞳明场数据-暗场数据)/(b入瞳明场数据-暗场数据);
[0047]
ac入瞳差分结果=(a入瞳明场数据-暗场数据)/(c入瞳明场数据-暗场数据);
[0048]
ba入瞳差分结果=(b入瞳明场数据-暗场数据)/(a入瞳明场数据-暗场数据);
[0049]
bc入瞳差分结果=(b入瞳明场数据-暗场数据)/(c入瞳明场数据-暗场数据);
[0050]
ca入瞳差分结果=(c入瞳明场数据-暗场数据)/(a入瞳明场数据-暗场数据);
[0051]
cb入瞳差分结果=(c入瞳明场数据-暗场数据)/(b入瞳明场数据-暗场数据);
[0052]
将所得入瞳差分结果的矩阵直接以图2的形式显示,进行镜头洁净度的判断。
[0053]
从结果中可以看到,差分平场矫正的结果受图像本身强度分布的影响较小,可以抑制大角度视场低相对照度的影响;同一个杂质出现了两个位置,一个数据小于周围像素,图像中呈现为暗点,另一个数据大于周围像素,图像中呈现为亮点,从正反两个方向对杂质信息进行提取放大,明暗两点的分布有统一的规律;在同一杂质的两位置(明暗两个位置)有相互重叠的情况,其重叠处的边缘呈现出明显的对比,有边缘增强的效果。
[0054]
整个检测过程,光学系统并没有发生移动,只有入瞳大小发生了变化。本方法适用于入瞳位置在镜头外侧,或镜头内置入瞳的情况。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1