一种捷联式海洋重力仪主机减摇装置的制作方法
[0001]
本发明涉及海洋重力测量设备领域,具体而言,涉及所述的一种捷联式海洋重力仪主机减摇装置。
背景技术:
[0002]
海洋重力仪是舰船上或潜艇内使用的重力测量装置。测量船在海洋中保持匀速航行,连续地进行重力测量,由于仪器安放在运动的船体上,船体在航行中受海浪影响必然会有横摇、纵摇旋转角输入以及垂向、水平向的线加速度。修睿在《导航与控制》2019年第18卷第1期中发表的文章《海空重力仪的技术现状及新应用》中综合比较了国内外海空重力仪发现现状,其中平台式原理的美国l&riii、德国kss海洋重力仪,在恶劣海况中测量精度分别为1.0mgal和2.0mgal,国内捷联式海洋重力仪在稳定海况环境下精度可达0.7mgal。然而捷联式海洋重力仪在此高海况环境下,重力仪主机传感器与重力垂线产生较大偏角,将会明显影响到重力测量精度。因此,需要一套减摇装置,用以为重力仪主机提供稳定环境,屏蔽舰船等载体的运动干扰,使得捷联式海洋重力仪传感器方向始终保持在重力垂线附近,从而有效提高海洋重力仪的测量精度。减摇装置的引入弥补了捷联原理重力仪在大偏角输入下重力解算误差的缺点。随着捷联算法发展,未来捷联重力仪搭配减摇装置的组合在测量精度,稳定性上将大幅提高,并取代平台式重力仪。
技术实现要素:
[0003]
本发明解决的技术问题是:克服现有技术的不足,提出一种捷联式海洋重力仪主机减摇装置,通过降低外界角度输入、隔离垂向、径向上的干扰线加速度,提高重力测量精度。
[0004]
本发明解决技术的方案是:一种捷联式海洋重力仪主机减摇装置,包括内框架、中框架、外框架、横摇转动组件、纵摇转动组件;
[0005]
横摇转动组件,由一对同一轴线上两只轴承组成,该轴线平行于水平面横轴,用于屏蔽隔离船体横摇轴上的旋转;
[0006]
纵摇转动组件,由另一对同一轴线上两只轴承组成,该轴线平行于水平面纵轴,用于屏蔽隔离船体纵摇轴上的旋转;
[0007]
内框架,用于与重力仪主机固连,安装重力仪之后的内框架与纵摇转动组件两只轴承的内圈固定连接;
[0008]
中框架,纵向与纵摇转动组件两只轴承的外圈连接;横向与横摇转动组件两只轴承的内圈固定连接;
[0009]
外框架,固定在船体上,横向与横摇转动组件的外圈固定连接。
[0010]
上述捷联式海洋重力仪主机减摇装置还包括隔振单元;
[0011]
隔振单元,由至少四只三轴等刚度金属隔振器组成,金属隔振器一端与外框架固定连接,另一端与船体固定连接,用于屏蔽隔离船体垂向、径向上的线加速度。
[0012]
上述捷联式海洋重力仪主机减摇装置还包括配重单元,配重单元位于内框架下端,与内框架固定连接中,通过改变配重块重量,调整系统重心,进而调整减摇装置转动频率。
[0013]
所述配重单元用于来控制重力仪与减摇装置组成的系统的重心,控制减摇装置转动频率,用以避开船体摇摆频率,进而适用不同船体使用环境。
[0014]
所述减摇装置转动频率根据如下公式确定:
[0015][0016]
其中,f为系统转动频率,m为重力仪、内框架、外框架和配重单元的总重量,s为系统重心与旋转中心距离,i为转动惯量。
[0017]
所述内框架、中框架、外框架三个框架均由铝合金材质制成。
[0018]
本发明与现有技术相比的有益效果是:
[0019]
(1)、本发明通过利用横摇转动组件,纵摇转动组件隔离这两个方向轴上的旋转角,保证了重力仪主机没有大转角输入,从而提高重力测量精度。
[0020]
(2)、本发明通过隔振单元隔离垂向、径向上的线加速度,将垂向、径向振动冲击进行有效隔离,减小了外界干扰,提高重力测量精度。
[0021]
(3)、本发明具有易于拆装,纯机械式结构可靠性高等特点。
附图说明
[0022]
为更清楚地说明本发明实施例的技术方案,下面将对实施例中所需使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0023]
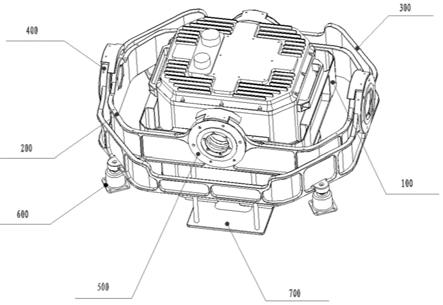
图1为本发明较佳实施例提供的海洋重力仪减摇装置的结构示意图。
[0024]
主要元件符号说明:内框架100,中框架200,外框架300,横摇转动组件400,纵摇转动组件500,隔振单元600,配重单元700。
[0025]
图2为本发明较佳实施例内框架的结构示意图。
[0026]
图3为本发明较佳实施例中框架结构示意图。
[0027]
图4为本发明较佳实施例外框架结构示意图。
[0028]
图5为本发明较佳实施例横摇转动组件结构示意图。
[0029]
图6为本发明较佳实施例纵摇转动组件结构示意图。
[0030]
图7为本发明较佳实施例隔振单元结构示意图。
[0031]
图8为本发明较佳实施例配重单元结构示意图。
具体实施方式
[0032]
下面结合实施例对本发明作进一步阐述。
[0033]
下面将结合本发明实施例中附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因
此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
请参阅图1,是本发明较佳实施例提供的一种海洋重力仪主机减摇装置,所述海洋重力仪主机减摇装置包括内框架100,中框架200,外框架300,横摇转动组件400,纵摇转动组件500,隔振单元600和配重单元700。
[0035]
横摇转动组件400,由一对同一轴线上两只轴承组成,该轴线平行于水平面横轴,用于屏蔽隔离船体横摇轴上的旋转。轴承如图5所示。
[0036]
纵摇转动组件500,由另一对同一轴线上两只轴承组成,该轴线平行于水平面纵轴,用于屏蔽隔离船体纵摇轴上的旋转。轴承如图6所示。
[0037]
内框架100,用于与重力仪主机固连,安装重力仪之后的内框架与纵摇转动组件两只轴承的内圈固定连接;具体为:重力仪主机通过螺钉固连在内框架安装台阶上,纵摇转动组件插入内框架安装孔与之固连。
[0038]
中框架200,纵向与纵摇转动组件两只轴承的外圈连接;横向与横摇转动组件两只轴承的内圈固定连接;具体为:纵摇转动组件插入中框架与内框架的安装孔,实现纵摇转动组件、内框架、中框架三者之间的固连。
[0039]
外框架300,用于固定连接中框架200及横摇转动组件400,及与船体固连;具体为:横摇转动组件插入中框架与外框架的安装孔,实现纵摇转动组件、中框架、外框架三者之间的固连。外框架通过螺钉与隔振单元固连。
[0040]
隔振单元600,由至少四只三轴等刚度金属隔振器组成,金属隔振器一端与外框架固定连接,另一端与船体固定连接,用于屏蔽隔离船体垂向、径向上的线加速度。
[0041]
配重单元700,位于内框架下端,与内框架固定连接中,通过改变配重块重量,调整系统重心,进而调整减摇装置转动频率。
[0042]
上述减摇装置,横摇转动组件、纵摇转动组件,在重力的作用下通过两组轴承实现主机传感器始终保持在重力垂线上附近,屏蔽隔离掉外界大角度转角的输入。横摇转动组件、纵摇转动组件,可通过轴承选型调整系统旋转的阻尼系数,进而控制重力仪主机从摇摆状态至稳定状态的周期,适应不同船体使用环境,轴承阻尼系数越大其周期越短。
[0043]
所述隔振单元由多只(至少四只)三轴等刚度金属隔振器组成,可以有效降低垂向、径向上干扰加速度的输入。隔振器选型应严格与系统总重匹配,以达到最佳隔振效率。尽可能减小径向安装应力,保证隔振器在最佳使用状态。金属隔振器的形状与构造如图7所示。
[0044]
所述配重单元用于来控制重力仪与减摇装置组成的系统的重心,控制减摇装置转动频率,此转动频率应避开舰船在航行过程中摇摆频率,避免出现摆动频率共振,进而适用不同船体使用环境。配重单元的形状与构造如图8所示。
[0045]
所述减摇装置转动频率根据如下公式确定:
[0046][0047]
其中,f为系统转动频率,m为重力仪、内框架、外框架和配重单元的总重量,s为系统重心与旋转中心距离,i为转动惯量。
[0048]
如图2、图3、图4所示,所述内框架、中框架、外框架三个框架均由铝合金材质制成,通过合理布置加强筋结构,实现框架在较轻质量的状态下获得较高刚强度,保证结构稳定性。
[0049]
综上,本发明实施例提供的一种海洋重力仪主机减摇装置,在内、中、外框架连接支撑的作用下,通过利用横摇转动组件,纵摇转动组件,屏蔽重力仪主机由于舰船等载体的横摇、纵摇轴上的角运动造成重力仪主机的传感器与重力垂线的偏转角;通过隔振单元作用,对船体在垂向、径向上的振动冲击进行有效隔离。最终使得海洋重力仪不受外界力矩干扰,从而提高海洋重力仪的测量精度。并且该海洋重力仪主机减摇装置具有易于拆装,纯机械式结构可靠性高等特点。
[0050]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1