一种应用于驱动轴的称重拉拔检测装置的检测方法与流程
[0001]
本申请涉及驱动轴检测的领域,尤其是涉及一种应用于驱动轴的称重拉拔检测装置的检测方法。
背景技术:
[0002]
汽车驱动轴是汽车上必不可少的零件之一,为了保证每个驱动轴符合生产要求,需要对驱动轴的重量、总长进行检测,以判断是否符合使用规格,由于汽车驱动轴可以拉伸收缩,且具有一定的拉拔力,为了检验驱动轴中的扣环是否安装到位,通常是通过检测驱动轴的拉拔力来进行判断。
[0003]
针对上述中的相关技术,发明人认为存在以下缺陷:由于需要对驱动轴的不同参数进行检测,从而需要将驱动轴更换至不同的检测设备,从而影响检测效率。
技术实现要素:
[0004]
为了提高对驱动轴的检测效率,本申请提供一种应用于驱动轴的称重拉拔检测装置的检测方法。
[0005]
第一方面,本申请提供的一种应用于驱动轴的称重拉拔检测装置的检测方法,采用如下的技术方案:一种应用于驱动轴的称重拉拔检测装置的检测方法,所述装置包括机架,所述机架设置有称重机构,所述机架固定连接有用于支撑驱动轴的支撑机构,所述机架设置有第一安装座,所述第一安装座固定连接有用于夹持驱动轴端部的夹持机构,所述机架设置有用于检测驱动轴拉拔力的拉拔机构,所述拉拔机构固定连接于第一安装座,所述方法包括:将驱动轴放置于支撑机构后,控制支撑机构向下移动,使驱动轴自由落放于称重机构进行称重,测得驱动轴重量值;控制支撑机构向上托起驱动轴,使驱动轴与称重机构分离;控制第一安装座朝向驱动轴方向移动,使夹持机构抵接于驱动轴的两端,测得驱动轴总长度值;控制夹持机构夹持于驱动轴的两端,控制拉拔机构驱动第一安装座朝向背离驱动轴的方向移动,测得驱动轴拉拔力值;控制第一安装座与夹持机构复位,取走产品。
[0006]
通过采用上述技术方案,操作者将驱动轴放置在支撑机构上,之后控制支撑机构向下移动,使驱动轴能够放置在称重机构进行称重,之后支撑机构向上移动,使驱动轴与称重机构分离,并将第一安装座朝向驱动轴方向移动,使夹持机构能够抵接于驱动轴的两端,从而能够得到驱动轴的总长度值,之后通过将夹持机构夹持于驱动轴的两端,拉拔机构驱动第一安装座移动,从而能够检测到驱动轴的拉拔力值,进而提高检测效率。
[0007]
可选的,所述称重机构包括设置于机架的称重台,所述称重台固定连接有可放置驱动轴的称重支架,所述方法包括:
将驱动轴放置于支撑机构后,控制支撑机构向下移动,使驱动轴自由落放于称重支架上进行称重,通过称重台测得驱动轴重量值;并判断驱动轴重量值是否位于预设的要求重量范围内;若是,则录入此重量值,若否,则停止操作并报警。
[0008]
通过采用上述技术方案,驱动轴通过称重台测得重量值后,将重量值与预设值进行比较,进而能够及时提醒操作者将不达标的驱动轴挑选出来。
[0009]
可选的,所述支撑机构包括固定连接于机架的支架,所述支架固定连接有气缸,所述气缸输出端固定连接有用于支撑驱动轴的支撑件,所述方法包括:控制气缸驱动支撑件向上托起驱动轴,使驱动轴与称重支架分离;通过采用上述技术方案,气缸驱动支撑件向上移动,使驱动轴与称重支架分离。
[0010]
可选的,所述夹持机构包括分别固定连接于第一安装座的夹爪,所述第一安装座固定连接有固定板,所述固定板设置有用于抵接驱动轴端部的抵接块,所述方法包括:控制第一安装座朝向驱动轴方向移动,使两抵接块均抵接于驱动轴的两端,测得驱动轴总长度值;并判断产品总长度值是否位于预设的要求长度范围内;若是,则录入此总长度值,若否,则停止操作并报警。
[0011]
通过采用上述技术方案,将第一安装座移动,使两个抵接块均能够抵接于驱动轴的两端,从而可测得驱动轴总长,之后通过与预设值进行比较,从而能够将不达标的驱动轴挑选出来。
[0012]
可选的,所述拉拔机构包括滑移连接于机架的连接座,所述连接座沿驱动轴轴向滑移,所述机架固定连接有第一轴承座,所述第一轴承座转动连接有拉拔丝杆,所述拉拔丝杆螺纹连接有移动块,所述移动块固定连接于连接座,所述连接座固定连接有拉拔力检测元件,所述拉拔力检测元件的一端固定连接于第一安装座,所述机架固定连接有电机,所述电机输出端固定连接于拉拔丝杆,所述方法包括:控制夹爪夹持于驱动轴的两端,控制电机驱动连接座移动,使连接座通过拉拔力检测元件带动第一安装座朝向背离驱动轴方向移动,通过拉拔力检测元件测量驱动轴拉拔力值;并判断驱动轴拉拔力值是否等于或大于预设的拉拔力阈值;若是,则录入此拉拔力值,若否,则第一安装座停止移动并报警。
[0013]
通过采用上述技术方案,将夹爪夹持于驱动轴的两端,之后电机驱动连接座移动,进而使拉拔力检测元件带动第一安装座朝向背离驱动轴方向移动,通过拉拔力检测元件得到驱动轴拉拔力值,之后将此拉拔力值与预设值进行比较,将不达标的驱动轴挑选出来。
[0014]
可选的,所述机架设置有摄像头,当所述驱动轴位于支撑件上时,所述摄像头扫描端正对驱动轴识别码设置,所述方法包括:通过将摄像头扫描端扫描驱动轴上的识别码,提取识别码数值;并判断驱动轴识别码数值是否与预设的识别码阈值相同;若是,则录入此识别码数值,若否,则报警。
[0015]
通过采用上述技术方案,通过获取产品识别码,将获取的产品识别码数据与预设的识别码阈值进行比对,从而能够将不属于同一规格的产品筛选出来,防止由于员工误操
作,而导致发生混料现象。
[0016]
可选的,测量驱动轴总长度值的方法具体为:控制电机驱动第一安装座朝向驱动轴方向移动,使两抵接块均抵接于驱动轴的两端,通过拉拔力检测元件测得驱动轴两端所受到的压力值;并判断此压力值是否等于或大于预设压力值;若是,则控制第一安装座停止移动驱动轴,并录入当前测量产品的光栅尺位置量。
[0017]
通过采用上述技术方案,在移动驱动轴之后,使驱动轴两端受到轴向的作用力,进而获取驱动轴两端所受到的压力值,并将此压力值与预设压力值进行比较,从而可获得驱动轴的总长。
[0018]
可选的,测量驱动轴拉拔力值的方法具体为:控制夹爪夹持于驱动轴的两端,控制电机驱动连接座移动,使连接座通过抗拔力检测元件驱动第一安装座朝向背离驱动轴方向移动,通过光栅尺位置量测量驱动轴的位移值;并判断此位移值是否等于或大于预设位移值;若是,则控制第一安装座停止移动驱动轴,并录入当前驱动轴的拉拔力值。
[0019]
通过采用上述技术方案,将驱动轴朝向两端进行拉拔,使驱动轴的位移等于或大于预设位移值时,可停止对驱动轴的移动,同时获取此时驱动轴所承受的拉力值。
[0020]
可选的,所述方法还包括:将不达标产品重复进行检测评估。
[0021]
通过采用上述技术方案,对检测不达标的产品重复检测,以确保检测结果正确。
[0022]
第二方面,本申请提供的一种智能终端,采用如下的技术方案:一种智能终端,包括存储器和处理器,所述存储器上存储有能够被处理器加载并执行如一种应用于驱动轴的称重拉拔检测装置的检测方法中任一种方法的计算机程序。
[0023]
通过采用上述技术方案,能够存储并处理相应的程序,具有实现对驱动轴多功能自动化检测的特点,从而便于提高检测效率。
附图说明
[0024]
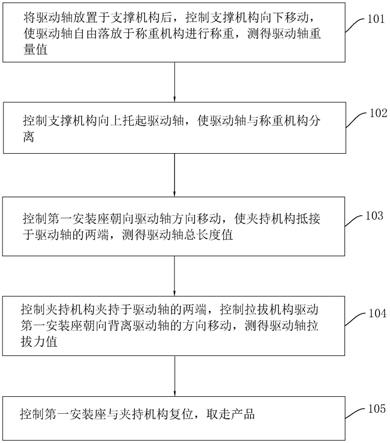
图1是本申请实施例一的检测方法的流程框图。
[0025]
图2是本申请实施例二的整体结构示意图。
[0026]
图3是本申请实施例二中支架的结构示意图。
[0027]
图4是本申请实施例二中拉拔机构的结构示意图。
[0028]
附图标记说明:1、机架;2、窗口;3、称重机构;31、称重台;32、称重支架;4、支撑机构;5、第一安装座;6、第二安装座;7、夹持机构;8、拉拔机构;9、第二轴承座;91、调节丝杆;92、调节块;93、手轮;41、支架;42、气缸;43、支撑件;431、底板;432、斜架;433、辅助轮;71、夹爪;72、固定板;73、抵接组件;731、螺纹杆;732、抵接块;81、连接座;82、第一轴承座;83、拉拔丝杆;84、移动块;85、拉拔力检测元件;86、电机。
具体实施方式
[0029]
以下结合附图1-4对本申请作进一步详细说明。
[0030]
实施例一:本申请实施例公开一种应用于驱动轴的称重拉拔检测装置的检测方法,该装置包括机
架,机架设置有称重机构,机架固定连接有用于支撑驱动轴的支撑机构,机架设置有第一安装座,第一安装座固定连接有用于夹持驱动轴端部的夹持机构,机架设置有用于检测驱动轴拉拔力的拉拔机构,拉拔机构固定连接于第一安装座,参照图1所示,该方法包括:101、将驱动轴放置于支撑机构后,控制支撑机构向下移动,使驱动轴自由落放于称重机构进行称重,测得驱动轴重量值;102、控制支撑机构向上托起驱动轴,使驱动轴与称重机构分离;103、控制第一安装座朝向驱动轴方向移动,使夹持机构抵接于驱动轴的两端,测得驱动轴总长度值;104、控制夹持机构夹持于驱动轴的两端,控制拉拔机构驱动第一安装座朝向背离驱动轴的方向移动,测得驱动轴拉拔力值;105、控制第一安装座与夹持机构复位,取走产品。
[0031]
可选的,称重机构包括设置于机架的称重台,称重台固定连接连接有可放置驱动轴的称重支架,步骤101所述的过程还可以为:将驱动轴放置于支撑机构后,控制支撑机构向下移动,使驱动轴自由落放于称重支架上进行称重,通过称重台测得驱动轴重量值;判断驱动轴重量值是否位于预设的要求重量范围内;若是,则录入此重量值;若否,则停止操作并报警。
[0032]
可选的,支撑机构包括固定连接于机架的支架,支架固定连接有气缸,气缸输出端固定连接有用于支撑驱动轴的支撑件,步骤102所述的过程还可以为:控制气缸驱动支撑件向上托起驱动轴,使驱动轴与称重支架分离;可选的,夹持机构包括分别固定连接于第一安装座的夹爪,第一安装座固定连接有固定板,固定板设置有用于抵接驱动轴端部的抵接块,步骤103所述的过程还可以为:控制第一安装座朝向驱动轴方向移动,使两抵接块均抵接于驱动轴的两端,测得驱动轴总长度值;具体的,移动参数可以通过摄像头获得;判断产品总长度值是否位于预设的要求长度范围内;若是,则录入此总长度值;若否,则停止操作并报警。
[0033]
可选的,上述过程中,在控制电机驱动第一安装座朝向驱动轴方向移动,使两抵接块均抵接于驱动轴的两端后,测量驱动轴总长度值的方法具体为:通过拉拔力检测元件测得驱动轴两端所受到的压力值;具体的,拉拔力检测元件为拉拔力传感器,压力值可以通过拉拔力传感器获得;判断此压力值是否等于或大于预设压力值;若是,则控制第一安装座停止移动驱动轴,并录入当前测量产品的光栅尺位置量;若否,控制电机继续驱动第一安装座移动,直到驱动轴两端所受到的压力值等于或大于预设压力值。
[0034]
可选的,拉拔机构包括滑移连接于机架的连接座,连接座沿驱动轴轴向滑移,机架固定连接有第一轴承座,第一轴承座转动连接有拉拔丝杆,拉拔丝杆螺纹连接有移动块,移
动块固定连接于连接座,连接座固定连接有拉拔力检测元件,拉拔力检测元件的一端固定连接于第一安装座,机架固定连接有电机,电机输出端固定连接于拉拔丝杆,步骤104所述的过程还可以为:控制夹爪夹持于驱动轴的两端,控制电机驱动连接座移动,使连接座通过拉拔力检测元件带动第一安装座朝向背离驱动轴方向移动,通过拉拔力检测元件测量驱动轴拉拔力值;并判断驱动轴拉拔力值是否等于或大于预设的拉拔力阈值;若是,则录入此拉拔力值,若否,则第一安装座停止移动并报警。
[0035]
可选的,控制夹爪夹持于驱动轴的两端,控制电机驱动连接座移动,使连接座通过拉拔力检测元件带动第一安装座朝向背离驱动轴方向移动后,测量驱动轴拉拔力值的方法具体为:通过光栅尺位置量测量驱动轴的位移值;具体的,光栅尺是由主尺和光栅读数头两部分组成,其中一个抵接块上安装主尺,另一个抵接块上安装读数头,在第一安装座移动时,主尺到读数头的距离,能够通过读数头显示出来,进而通过读数头获取驱动轴的位移值;判断此位移值是否等于或大于预设位移值;若是,则控制第一安装座停止移动驱动轴,并录入当前驱动轴的拉拔力值。
[0036]
若否,控制电机继续驱动第一安装座移动,直到驱动轴的位移值等于或大于预设位移值。
[0037]
可选的,机架设置有摄像头,当驱动轴位于支撑件上时,摄像头扫描端正对驱动轴识别码设置,方法包括:通过将摄像头扫描端扫描驱动轴上的识别码,提取识别码数值;具体的,识别码可以为条形码,提取识别码数值通过图像处理技术提取识别码内的数值;判断驱动轴识别码数值是否与预设的识别码阈值相同;若是,则录入此识别码数值;若否,则报警。
[0038]
可选的,方法还包括:将不达标产品重复进行检测评估;具体的,将不达标产品重复进行三次上述检测步骤,以确保是产品出现问题还是检测设备出现问题。
[0039]
实施例二:参照图2,为本申请实施例所提供的一种驱动轴的称重拉拔检测装置,该装置包括呈中空的机架1,机架1上表面开设有与其内腔连通的窗口2,机架1内腔位于窗口2的位置设置有称重机构3,称重机构3包括固定于机架1内腔中的称重台31,且称重台31与窗口2正对,并在称重台31上表面固定有呈竖直的称重支架32,且称重支架32伸出窗口2,并沿驱动轴轴线设置,并且称重支架32呈开口朝上的c型设置,从而可将驱动轴放置于称重支架32上对其进行称重。
[0040]
参照图2,机架1固定有用于支撑驱动轴的支撑机构4,且支撑机构4沿驱动轴的轴
线设置,机架1通过设置滑轨滑移连接有第一安装座5与第二安装座6,其中第一安装座5包括一横部、两竖部,且横部的两端分别与两竖部的上端垂直焊接,同时第二安装座6与第一安装座5的结构相同,并且第一安装座5位于驱动轴的一端,第二安装座6位于驱动轴背离第一安装座5的一端,且第一安装座5与第二安装座6均位于驱动轴的轴线上,在第一安装座5与第二安装座6的上表面均固定连接有用于夹持驱动轴端部的夹持机构7,机架1设置有用于检测驱动轴拉拔力的拉拔机构8,拉拔机构8固定于第一安装座5。
[0041]
参照图2,机架1上表面焊接有第二轴承座9,第二轴承座9转动连接有呈水平的调节丝杆91,且调节丝杆91的轴向与驱动轴的轴向平行并位于第二安装座6横部的下方,调节丝杆91螺纹连接有呈竖直的调节块92,调节块92上端焊接于第二安装座6横部的下表面,调节丝杆91背离驱动轴的一端焊接有手轮93。
[0042]
参照图2与图3,支撑机构4包括通过螺栓固定于机架1位于窗口2两侧位置的支架41,且支架41位于窗口2上方,并且支架41沿驱动轴的轴线设置,支架41侧壁固定连接有气缸42,气缸42输出端朝上并焊接有用于支撑驱动轴的支撑件43,且支撑件43与称重支架32对齐。机架1设置有摄像头(图中未标),当驱动轴位于支撑件上时,摄像头扫描端正对驱动轴上的识别码设置。支撑件43包括焊接于气缸42输出端的底板431,底板431呈水平设置,底板431的两端分别一体连接有朝向斜上方倾斜的斜架432,两斜架432相向倾斜并位于驱动轴的两侧,斜架432朝向驱动轴的一侧通过转轴转动连接有接触于驱动轴侧壁的辅助轮433,辅助轮433的轴向与斜架432倾斜方向平行。
[0043]
参照图4,夹持机构7包括分别固定于第一安装座5与第二安装座6上表面的夹爪71,且夹爪71通过夹爪气缸控制夹爪71的夹持或张开,第一安装座5与第二安装座6分别位于夹爪71背离驱动轴的一侧固定有呈竖直的固定板72,固定板72设置有用于抵接驱动轴端面的抵接组件73。抵接组件73包括沿横向螺纹穿设于固定板72的螺纹杆731,且螺纹杆731朝向驱动轴的一端焊接有呈竖直的抵接块732,抵接块732抵接于驱动轴的端部。
[0044]
参照图4,拉拔机构8包括滑移连接于机架1的连接座81,连接座81与第一安装座5结构相同,且连接座81沿驱动轴轴线滑移,且连接座81与第一安装座5对齐设置,机架1位于第一安装座5横部的下方焊接有第一轴承座82,第一轴承座82转动连接有呈水平的拉拔丝杆83,拉拔丝杆83的轴向与驱动轴的轴向平行,且拉拔丝杆83螺纹连接有呈竖直的移动块84,移动块84上端焊接于连接座81横部的下表面,连接座81横部下表面背离移动块84的一端固定有拉拔力检测元件85,且拉拔力检测元件85为拉拔力传感器,拉拔力检测元件85的一端固定于连接座81下表面,拉拔力检测元件85的另一端固定于第一安装座5下表面,机架1固定有电机86,电机86输出端固定于拉拔丝杆83背离驱动轴的一端。
[0045]
本申请实施例一种应用于驱动轴的称重拉拔检测装置的检测方法的实施原理为:先将驱动轴放置在辅助轮433上,之后气缸42带动辅助轮433向下移动,使驱动轴自由落放于称重支架32上进行称重,之后需要测试驱动轴的拉拔力时,先通过转动手轮93,使第二安装座6的位置根据待测驱动轴的总长进行调节,使夹爪71能够位于待测驱动轴的可夹持位置处,之后气缸42驱动辅助轮433向上移动,进而将驱动轴向上托起,使驱动轴与称重支架32分离,之后电机86驱动第一安装座5移动,使抵接块732抵接于驱动轴的两端端面,再控制夹爪71夹持于驱动轴的两端,进而将驱动轴的位置进行限位,之后电机86驱动移动块84朝向背离驱动轴的方向移动,使移动块84带动连接座81移动,使拉拔力检测元件85拉动第一
安装座5移动,通过拉拔力传感器便会瞬间感应到驱动轴往回收缩的力,从而检测出拉拔力是否达标,从而可对驱动轴进行称重、测长以及测拉拔力的自动化检测,进而能够降低劳动者强度,提高检测效率。
[0046]
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1