预制混凝土构件点状凹坑结合面粗糙度检测方法与流程
[0001]
本发明涉及装配式建筑技术领域,具体涉及一种预制混凝土构件点状凹坑结合面粗糙度检测方法。
背景技术:
[0002]
装配式建筑具有工业化水平高、安装施工快、减少人力成本、节能环保等优点,已成为国内外建筑业发展的主流方向。在装配式混凝土结构中存在大量的接缝,且接缝往往处于结构受力较大或较复杂的部位,因此接缝的性能对结构的承载力、刚度都会有很大的影响。
[0003]
有关接缝结合面抗剪性能的研究成果表明,预制混凝土构件结合面的粗糙程度是影响其抗剪性能的一个重要因素,不同粗糙度的结合面对其抗剪性能有着显著的影响。为此,行业标准《装配式混凝土结构技术规程》jgj 1—2014规定,预制混凝土构件结合面制作时应按设计要求进行粗糙面处理,设计无具体要求时,可用化学处理、拉毛或凿毛等方法制作粗糙面并且规定“粗糙面的面积不宜小于结合面的80%,预制板的粗糙面凹凸深度不应小于4mm,预制混凝土梁端、柱端、墙端的粗糙面凹凸深度不应小于6mm。”同时,国家标准《混凝土结构工程施工质量验收规范》gb50204-2015中将“预制混凝土构件的粗糙面的质量及键槽的数量”作为预制混凝土构件进场一项验收内容。然而,粗糙度如何测定和评价是一个关键问题。
[0004]
实际工程中的预制混凝土构件进行粗糙面处理时,拉毛法、化学处理露骨料法等均有采用,拉毛法形成条状凹槽,化学处理露骨料法形成点状凹坑。
[0005]
根据国际结构混凝土协会(fib)发布的《模式规范》(mc 2010)对粗糙度有两种定义,一种是平均粗糙度rm,另一种是峰谷粗糙度rz。其中,平均粗糙度rm表示的是混凝土表面边缘轮廓相对于中线的平均偏移量,峰谷粗糙度rz表示的是表面轮廓峰谷高度差,显然jgj 1—2014中所规定的粗糙面凹凸深度指标采用的是峰谷粗糙度rz。目前,根据粗糙度的两种定义,针对预制混凝土构件表面粗糙度的检测方法分为灌注体积法和深度测量法两大类。
[0006]
灌注体积法主要包括铺砂法、硅粉堆落法和细小铁珠测定法,其测试的结果为平均粗糙度rm,不能直接按照jgj 1—2014中给出的粗糙面凹凸深度指标进行评判。尽管也有研究人员提出将铺砂法的测试结果通过推定系数转换成峰谷粗糙度rz,但由于结合面的凹凸形状并不规则,推定系数的确定成为一大难题。此外,灌注体积法本身也存在一定的局限性和缺点:(1)只能适用于所测结合面是水平面的情况;(2)测区内灌注物的铺设高度与结合面的最高点齐平,灌注体积超出了测区内大多数“凹坑或凹槽”实际所需的填充体积,带来了一定的误差;(3)操作过程比较繁琐。
[0007]
深度测量法主要包括凹凸仪测试法和基准面测深尺法,其中凹凸仪测试法目前只能在实验室进行,基准面测深尺法能够在现场操作,该方法通过将透明多孔基准板紧贴在预制混凝土构件粗糙面上,测深尺的探针穿过透明多孔基准板的孔洞测量凹凸深度,其测
试结果为峰谷粗糙度rz,可以直接按照jgj 1—2014中给出的粗糙面凹凸深度指标进行评判。但是,基准面测深尺法在用于点状凹坑结合面粗糙度检测时,由于点状凹坑的波谷分布不像条状凹槽的波谷分布那么有规律,测深尺在穿过基准板孔洞寻找波谷时容易存在人为观察误差,测量的部位可能并不是真正的波谷,导致深度测量结果“偏小”。另外,由于粗糙面上各凸点的高度有所差异,基准面仅代表几处较高凸点的基准高度,多处深度测量值又被“放大”。以上两种因素交叉影响,最终导致测量结果存在一定误差。
[0008]
点状凹坑结合面的基体材料为混凝土,由于混凝土中骨料的抗压强度一般较高,在形成粗糙面时,混凝土一般处于初凝状态或早期强度,粗骨料不容易受到损伤,即粗糙面的“凹坑”主要存在于粗骨料之间。据调研预制混凝土构件的最大骨料粒径通常为25.0~31.5
㎜
,而混凝土中的最大骨料及其余粗骨料与对应结合面之间通常为斜向相交,完全与结合面平行分布的情况很少,因此,理论上在边长为最大骨料粒径的1.5~2倍的正方形区域范围内(即在边长为50
㎜
左右的正方形区域范围内),应该同时存在凸峰和凹谷。将基准面测深尺法中以单一基准板为基准高度的测量方法划分为网格化的小区域独立基准高度的测量方法,将会是一个新的解决思路。
[0009]
综上,针对点状凹坑结合面,有必要提供一种测试结果直接为凹凸深度,且技术先进、快速高效、准确全面的粗糙度检测方法。
技术实现要素:
[0010]
本发明要解决的技术问题是提供一种预制混凝土构件点状凹坑结合面粗糙度检测方法,方便快捷,检测效率高,检测准确度高。
[0011]
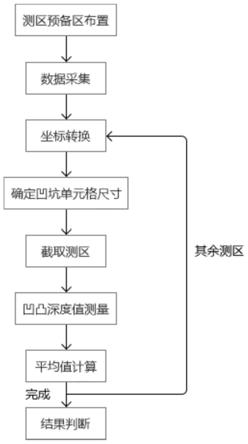
为了解决上述技术问题,本发明提供了一种预制混凝土构件点状凹坑结合面粗糙度检测方法,包括以下步骤:
[0012]
s1:测区预备区布置,在预制混凝土构件点状凹坑结合面上布置若干个测区预备区,并做好标记,当预制混凝土构件为混凝土剪力墙,点状凹坑结合面设置于混凝土剪力墙四个端面时,测区预备区的面积应能容纳长450mm、宽150mm的长方形,在其余类型预制混凝土构件的点状凹坑结合面上,测区预备区的面积应能容纳长300mm、宽300mm的正方形或者容纳长450mm、宽150mm的长方形;
[0013]
s2:数据采集,利用手持式三维扫描仪对s1中布置的测区预备区进行逐个扫描,获取原始三维点云数据;
[0014]
s3:坐标转换,对其中一个测区预备区的原始三维点云数据进行坐标转换,经坐标转换后的三维点云数据以预制混凝土构件点状凹坑结合面所在平面为x-y平面,垂直于x-y平面为z轴向;
[0015]
s4:确定凹坑单元格尺寸,凹坑单元格为正方形,凹坑单元格边长为混凝土最大骨料粒径的1.5~2倍,当凹坑间距有明确设计要求时,凹坑单元格边长为设计间距的2倍;
[0016]
s5:截取测区,利用点云数据处理软件,根据检测对象在该测区预备区中截取一个长方形的测区或者正方形的测区,长方形的测区的宽为凹坑单元格边长的2倍,长方形的测区的长为凹坑单元格边长的8倍,正方形的测区的边长为凹坑单元格边长的4倍;
[0017]
s6:凹凸深度值测量,利用点云数据处理软件,将s5中截取的测区划分为16个凹坑单元格,求得每个划分好的凹坑单元格内z轴最高点和最低点,即峰谷点,计算两点z值的高
度差,获得所有16个凹坑单元格内的凹凸深度值;
[0018]
s7:平均值计算,将获取的16个凹凸深度值,依次剔除3个最大值和3个最小值,剩余10个凹凸深度值的平均值作为该测区的平均凹凸深度值;
[0019]
s8:对剩余的测区预备区分别通过重复步骤s3~s7,得到各测区预备区对应的测区的平均凹凸深度值;
[0020]
s9:结果判断,综合各测区的测试结果得到所测预制混凝土构件点状凹坑结合面粗糙度推定值,并与粗糙度设计指标值进行比对,得到预制混凝土构件点状凹坑结合面粗糙度的评价结果。
[0021]
进一步地,在s1中,测区布置应避开预埋件、预留孔洞、桁架钢筋以及表面有明显凸出区域的干扰部位。
[0022]
进一步地,在s1中,每个预制混凝土构件应布置不少于2个测区预备区。
[0023]
进一步地,在s2中,利用手持式三维扫描仪对测区进行扫描时,扫描面积需至少覆盖整个测区预备区。
[0024]
进一步地,在s4中,凹坑单元格的边长设置为50mm。
[0025]
进一步地,在s5中,点云数据处理软件保留测区内16个凹坑单元格对应的图像,相邻两凹坑单元格间的边与边重合。
[0026]
进一步地,在s9中,先计算所有测区的平均凹凸深度值μ、各测区凹凸深度值的标准差s及各测区凹凸深度值的变异系数cv,计算公式如下:
[0027][0028][0029][0030]
式中:n—测区数量;μ
i
—第i个测区的平均凹凸深度值;
[0031]
得到所有测区的平均凹凸深度值μ和各测区凹凸深度值的变异系数cv后,按下列规定确定预制混凝土构件点状凹坑结合面粗糙度推定值μ
e
:
[0032]
当cv不大于0.3时,μ
e
=μ
[0033]
当cv大于0.3时,
[0034]
式中:μ
i,m
i
n
—所有测区中最小测区的凹凸深度值;
[0035]
最后将预制混凝土构件点状凹坑结合面粗糙度推定值与粗糙度设计指标值进行比对,若μ
e
≥4.0mm,且检测对象为预制混凝土叠合楼板、叠合梁、叠合墙板的粗糙面,则判定粗糙度符合要求,否则判定为不符合要求;若μ
e
≥6.0mm,且检测对象为预制混凝土梁端、柱端、墙端的粗糙面,则判定粗糙度符合要求,否则判定为不符合要求。
[0036]
本发明的有益效果:
[0037]
1、本发明的方法采用三维扫描的方式能够快速采集预制混凝土构件点状凹坑结合面的三维坐标数据,通过点云数据处理软件计算得到粗糙度检测结果,避免了现有方法繁杂和费时的检测过程,方便快捷,检测效率高,检测准确度高。
[0038]
2、本发明引入凹坑单元格的概念,通过混凝土最大骨料粒径或设计凹坑间距确定正方形凹坑单元格尺寸,凹坑单元格的大小适中,既确保了每个凹坑单元格内必存在峰点与谷点,又使得谷点能够与其相邻的峰点直接作差求得凹凸深度,从而避免了在传统的基准面测深尺法中以单一基准板为基准高度带来的凹凸深度测量误差,提高了检测精度。
[0039]
3、本发明将测区划分为连续的16个凹坑单元格,每个单元格相当于一个测点,求得测区内的16个凹凸深度值,使测点布置更具有代表性,也有效防止检测人员在测点选择时存在倾向性从而影响检测结果的公正性。
[0040]
4、本发明的方法采用的是手持式的扫描仪,操作非常灵活,可应用于预制墙、柱、梁、板等各种构件的点状凹坑结合面的检测。
附图说明
[0041]
图1是本发明的流程示意图;
[0042]
图2是本发明点云数据处理软件处理剪力墙端面测区的界面示意图;
[0043]
图3是本发明对剪力墙端面的测区进行截取并进行单元格划分的示意图;
[0044]
图4是本发明点云数据处理软件处理梁端面测区的界面示意图;
[0045]
图5是本发明对梁端面的测区进行截取并进行单元格划分的示意。
具体实施方式
[0046]
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
[0047]
实施例一:
[0048]
参照图1所示,本发明的用于预制混凝土构件点状凹坑结合面粗糙度检测方法的一实施例,针对某预制混凝土剪力墙端面进行检测,预制混凝土剪力墙的厚度为200mm,采用三维扫描法进行点状凹坑结合面粗糙度检测具体包括以下步骤:
[0049]
首先进行测区预备区的布置,在预制混凝土剪力墙四个端面各布置1个测区预备区,并用记号笔对测区预备区边框做好标记,所述测区预备区的面积应能容纳长450mm、宽150mm的长方形,测区预备区布置时避开了预埋件、预留孔洞等干扰部件,避免对后续检测产生干扰;
[0050]
然后进行数据采集,利用手持式三维扫描仪对布置的测区预备区进行逐个扫描,获取原始三维点云数据,扫描面积需至少覆盖整个测区预备区;
[0051]
接着对首个测区预备区的原始三维点云数据进行坐标转换,经坐标转换后的三维点云数据以预制混凝土剪力墙点状凹坑结合面所在平面为x-y平面,垂直于x-y平面为z轴向,参照图2所示,为软件内操作示意图,该软件为本发明配套的自主研发软件;
[0052]
随后确定凹坑单元格尺寸,凹坑单元格为正方形,凹坑单元格边长为混凝土最大骨料粒径的1.5~2倍,本实施例中选择为50mm;
[0053]
然后截取测区,利用点云数据处理软件,在首个测区预备区中截取一个长方形的测区,宽为凹坑单元格边长的2倍,长为凹坑单元格边长的8倍,即该测区可正好容纳16个凹坑单元格;
[0054]
随后进行凹凸深度值测量,利用点云数据处理软件,将截取的测区划分为16个凹坑单元格,相邻两凹坑单元格之间的边与边重合,参照图3所示;求得每个凹坑单元格内z轴最高点和最低点,即峰谷点,计算两点z值的高度差,获得所有16个凹坑单元格内的凹凸深度值;
[0055]
对测量后获取的16个凹凸深度值,依次剔除3个最大值和3个最小值,将剩余10个凹凸深度值的平均值作为第一个测区的平均凹凸深度值μ1;
[0056]
将剩余的3个测区预备区依次进行坐标转换至平均凹凸深度值计算的步骤,得到各测区的平均凹凸深度值μ
i
。具体结果如下表所示:
[0057]
表1单位:
㎜
[0058]
[0059][0060]
计算方式如下:
[0061]
根据公式计算得μ1=6.63mm,μ2=7.50mm,μ3=7.31mm,μ4=6.75mm
[0062]
再根据公式计算得μ=7.05mm
[0063]
根据公式和计算得:
[0064]
s=0.42mm,cv=0.06<0.3
[0065]
由于cv不大于0.3,推定値μ
e
=μ=7.05mm
[0066]
最终判定:μ
e
=7.05mm>6.0mm,判定该预制混凝土剪力墙端面点状凹坑粗糙度符合要求。
[0067]
实施例二:
[0068]
参照图1所示,本发明的用于预制混凝土构件点状凹坑结合面粗糙度检测方法的另一实施例,针对某预制混凝土梁端面进行检测,预制混凝土梁端面的尺寸为500*800mm,采用三维扫描法进行点状凹坑结合面粗糙度检测具体包括以下步骤:
[0069]
首先进行测区预备区布置,在预制混凝土梁两个端面各布置1个测区预备区,并用记号笔对测区预备区边框做好标记,测区预备区的面积应能容纳长300mm、宽300mm的正方形;
[0070]
然后进行数据采集,利用手持式三维扫描仪对布置的测区预备区进行逐个扫描,获取原始三维点云数据,扫描面积需至少覆盖整个测区预备区;
[0071]
接着对首个测区预备区的原始三维点云数据进行坐标转换,经坐标转换后的三维点云数据以预制混凝土构件点状凹坑结合面所在平面为x-y平面,垂直于x-y平面为z轴向,参照图4所示,为软件内操作示意图;
[0072]
随后确定凹坑单元格尺寸,正方形的凹坑单元格边长为混凝土最大骨料粒径的1.5~2倍,本实施例中选择为50mm;
[0073]
然后截取测区,利用点云数据处理软件,在首个测区预备区中截取一个正方形的测区,边长为凹坑单元格边长的4倍,即该测区可正好容纳16个凹坑单元格;
[0074]
随后进行凹凸深度值测量,利用点云数据处理软件,将截取的测区划分为16个凹坑单元格,相邻两凹坑单元格之间的边与边重合,参照图5所示;求得每个凹坑单元格内z轴最高点和最低点,即峰谷点,计算两点z值的高度差,获得所有16个凹坑单元格内的凹凸深度值;
[0075]
对测量后获取的16个凹凸深度值,依次剔除3个最大值和3个最小值,将剩余10个凹凸深度值的平均值作为第一个测区预备区的平均凹凸深度值μ1;
[0076]
将剩余的1个测区预备区依次进行坐标转换至平均凹凸深度值计算的步骤,得到测区的平均凹凸深度值μ2。
[0077]
综合各测区的测试结果得到所测预制混凝土梁点状凹坑结合面粗糙度推定值,并与粗糙度设计指标值进行比对,得到该预制混凝土梁点状凹坑结合面粗糙度的评价结果。
[0078]
本方法利用三维扫描设备快速有效地获取预制混凝土构件点状凹坑结合面粗糙面三维点云数据,在合理的布置测区预备区及并划分测区中的凹坑单元格后,采用点云数据处理软件计算单元格内波峰最高点和波谷最低点的高度差,选点更具代表性,规避了人为误差,大大提高了检测的准确度与效率,操作简单,易于推广使用。
[0079]
以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1