一种基于激光测距系统的烟草物料流量标定方法与流程
1.本发明属于烟草工艺检测技术领域,具体涉及一种基于激光测距系统的烟草物料流量标定方法。
背景技术:
2.卷烟加工过程需要对片烟、烟梗、烟丝、或者其他类型的卷烟原料进行多次回潮与干燥处理和大量的定量掺配和混合处理,过程中卷烟原料的流量对可以利用电子皮带秤或核子秤等技术对流量进行测量与控制,皮带秤应用范围极广,这些流量控制与测量技术成本高,占地大,不适合局部空间下流量监测与控制,现有技术中,通过基于光场成像的测试流量的方法,具有成本低,占地空间小的特点,灵活性好,但由于卷烟加工在不同工序对烟草这种生物质颗粒的膨胀或者收缩作用,造成了利用光学手段测量的数据只能获得体积流量数据,在很多环节例如混合和掺配环节(对质量流量要求比较高)就显示出技术不足了。而在烟草测量过程中式一个动态的过程,也需要对数据中研究或分析其其堆积程度对填充值,密度,质量,体积等特性的动态影响。
3.中国专利cn201610226610.2发明了一种基于单相机结构光的煤炭流量测量方法,但由于烟草物料表面为卷曲状,结构光在物料表面形成的特征点与其对应的深度存在算法无法弥补的误差,因此本专利选用激光测距法,数据直观,计算方便,景深信息丰富,误差更小。
技术实现要素:
4.为克服现有的缺陷,本发明提出了一种基于激光测距系统的烟草物料流量标定方法。
5.一种基于激光测距系统的烟草物料流量标定方法,通过标定系统来指导卷烟制丝环节中烟草物料传送的过程,减少由于堆积程度的不同而导致测量各个指标的误差,其特征在于,所述标定方法包括,
6.采集每一时刻下烟丝横截表面点到激光传感器的距离;
7.通过传送带空载的距离差值获取此时刻的横截面积,在时间下积分获取此时刻的流量;
8.获取单位长度下此重量的烟丝体积;
9.得到单位长度下不同重量的烟丝的密度来评估填充度;
10.选取一定堆积量的烟丝密度稳定区域为标定值。
11.其中,标定系统包括线型激光器、光场接收器、传送带、信息处理计算机、速度传感器、信息采集卡和可编程控制器,其中,所述线型激光器设置于光场接收器上,光场接收器连接信息采集卡和可编程控制器;传送带通过速度传感器连接信息采集卡和可编程控制器;信息处理计算机与信息采集卡和可编程控制器连接,所述线型激光器垂直于传送带上方。
12.线型激光器用于采集烟丝表面的某一时刻的横截面中的点距;速度传感器用以实时测量输送带输送速度;信息采集卡和可编程控制器用于采集速度信号,距离信号,并对激光传感器的工作进行控制;信息处理计算机用于对采集的信息进行数据处理获取烟丝截面,根据输送带的速度计算得到烟丝的体积流量,计算并绘制密度变化图。
13.其中,采集每一时刻下烟丝横截表面点到激光传感器的距离,通过三角测量原理,计算被测对象到线型激光器上主透镜的距离,
14.距离表达式:l=bf/x
×
sin(α)
15.式中,b为激光器光轴与接收器光轴之间的距离;f为接受镜头的焦距;x为光斑在光敏单元上偏离极限位置的位移;入射光与基线的夹角为α。
16.在确定系统的光路时,将光场接收器中位置传感器的一个轴与基线平行,则由通过算法得到的激光光点像素坐标为(p
x
,py)可得到x的值为:
17.x=cellsize*p
x
+deviationvalue
18.式中,cellsize是光敏单元上单个像素的尺寸,deviationvalue是通过像素点计算的投影距离和实际投影距离的偏差量。
19.其中,通过传送带空载的距离差值获取此时刻的横截面积,在时间下积分获取此时刻的流量,
20.将某一高度级的烟丝自然平铺在单位长度下的传送带上,将传送带上烟丝高度h划分为6至10个等份,分别称取各个等份单位长度下的m重量的烟丝。其中,获取单位长度下此重量的烟丝体积,激光传感器,设置为khz,开启传送带,采集每一时刻下烟丝横截距离ls上点到线型激光器的距离li,通过传送带空载的距离ln差值获取此时刻的横截面积si,在时间δti下积分获取此时刻的流量,进而获取单位长度下此重量的烟丝体积v
all
,如下式所示。
[0021][0022][0023]
其中,得到单位长度下不同重量的烟丝的密度来评估填充度,
[0024][0025]
式中ρ为密度。
[0026]
通过本发明提供的一种基于激光测距系统的烟草物料流量标定方法,针对激光测距系统和烟草加工过程中应用场景,以减少对烟草物料传送中动态检测时的误差。
附图说明
[0027]
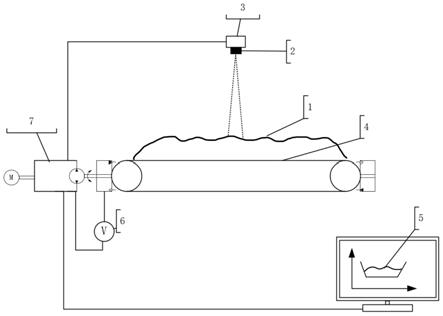
图1为标定系统示意图。
[0028]
图2为激光传感器的三角测距法示意图。
[0029]
图3为传送带烟丝质量与体积关系示意图。
[0030]
图4为传送带烟丝填充值分布示意图。
具体实施方式
[0031]
下面结合附图和具体实施例对本发明提供的一种基于激光测距系统的烟草物料流量标定方法进行详细描述。
[0032]
通过标定系统来指导卷烟制丝环节中烟草物料传送的过程,减少由于堆积程度的不同而导致测量各个指标的误差,其特征在于,所述标定方法包括,
[0033]
采集每一时刻下烟丝1横截表面点到激光传感器的距离;
[0034]
通过传送带空载的距离差值获取此时刻的横截面积,在时间下积分获取此时刻的流量;
[0035]
获取单位长度下此重量的烟丝1体积;
[0036]
得到单位长度下不同重量的烟丝的密度来评估填充度;
[0037]
选取一定堆积量的烟丝1密度稳定区域为标定值。
[0038]
图1所示,标定系统包括线型激光器2、光场接收器3、传送带4、信息处理计算机5、速度传感器6、信息采集卡和可编程控制器7,其中,所述线型激光器2设置于光场接收器3上,光场接收器3连接信息采集卡和可编程控制器7;传送带4通过速度传感器6连接信息采集卡和可编程控制器7;信息处理计算机5与信息采集卡和可编程控制器7连接,所述线型激光器2垂直于传送带4上方。
[0039]
图2所示,采集每一时刻下烟丝1横截表面点到激光传感器的距离,通过三角测量原理,计算被测对象到线型激光器2上主透镜的距离,
[0040]
距离表达式:l=bf/x
×
sin(α)
[0041]
式中,b为激光器光轴与接收器光轴之间的距离;f为接受镜头的焦距;x为光斑在光敏单元上偏离极限位置的位移;入射光与基线的夹角为α。
[0042]
在确定系统的光路时,将光场接收器3中位置传感器的一个轴与基线平行,则由通过算法得到的激光光点像素坐标为(p
x
,py)可得到x的值为:
[0043]
x=cellsize*p
x
+deviationvalue
[0044]
式中,cellsize是光敏单元上单个像素的尺寸,deviationvalue是通过像素点计算的投影距离和实际投影距离的偏差量。
[0045]
通过传送带空载的距离差值获取此时刻的横截面积,在时间下积分获取此时刻的流量,
[0046]
将某一高度级的烟丝1自然平铺在单位长度下的传送带上,将传送带2上烟丝高度h划分为6至10个等份,分别称取各个等份单位长度下的m重量的烟丝1。
[0047]
获取单位长度下此重量的烟丝1体积,
[0048]
激光传感器,设置为khz,开启传送带4,采集每一时刻下烟丝横截距离ls上点到线型激光器2的距离li,通过传送带4空载的距离ln差值获取此时刻的横截面积si,在时间δti下积分获取此时刻的流量,进而获取单位长度下此重量的烟丝体积v
all
,如下式所示。
[0049][0050][0051]
标定系统装置可以控制电机正反转,通过放置一次一定质量的烟丝,反复正转反
转,多次求得体积流量,求取其平均值更为准确。
[0052]
其中对于距离li做出以下说明,由于烟丝是不规则膨胀物,表面甚至存在阴影,测得的高度距离存在噪声,得到的距离需要进行滤波处理,此处采取限速滤波。把当前采样值tn与前两次t
n-1
与t
n-2
进行综合比较,取差值的绝对值作为比较依据取得结果值t,如下式:
[0053][0054]
经过滤波处理后,噪声明显降低,如需获取横截面图像,采取插值法拟合函数即可。
[0055]
得到单位长度下不同重量的烟丝1的密度来评估填充度,
[0056][0057]
式中ρ为密度。
[0058]
图3所示,明显看出斜率的变化,说明在传送带单位长度上,不同质量的烟丝的填充度在变化。
[0059]
图4所示,将不同的密度用直方图表示出来,在第二高度等级到第五高度等级之间,填充度发生了明显的变化,而在第六高度等级之后,烟丝的填充都趋于稳定,因此标定此装置下,烟丝的放置量为第五高度等级及其以上。
[0060]
最后应说明的是,以上实施例仅用以描述本发明的技术方案而不是对本技术方法进行限制,本发明在应用上可以延伸为其他的修改、变化、应用和实施例,并且因此认为所有这样的修改、变化、应用、实施例都在本发明的精神和教导范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1