一种多功能手指传感器标定工装的制作方法
[0001]
本发明属于多功能仿生手指以及标定工装领域,具体涉及一种多功能手指传感器标定工装。
背景技术:
[0002]
传感器主要有电阻式传感器、电容式传感器、压电式传感器、光学式传感器等。目前这些传感器主要在于测量信号类型单一,结构尺寸实用性差,导致柔性不好,易损坏,灵活性差等问题,不满足在灵巧手上实现即插即用、包络小、控制简单的特点。随着科学技术的发展,仿生手指或仿真机械手或者假手的制作工艺及功能越来越成熟,对于医疗和工业方面做出了巨大贡献,对于仿人机械手或假手,触觉是其获取未知环境信息的重要方式,可确保稳定、灵活的抓取操作。手指传感器作为一种仿人手指的触觉传感器,可广泛应用在类人机器人、医疗诊断、假手等方面。
技术实现要素:
[0003]
针对现有技术中的缺陷,本发明的目的是提供一种多功能手指传感器标定工装。本发明的技术方案如下:
[0004]
一种多功能手指传感器标定工装,包括电动缸电机、电动缸、电动缸支座、标定工装底座、双自由度机构、仿生手指、模组电机、标定平台、光电开关、模组、标准力传感器;其中:
[0005]
所述模组电机、模组、光电开关固定在标定工装底座上,模组电机与模组通过联轴器连接,所述光电开关在模组的两侧固定安装;所述标定平台与模组固定连接,所述标准力传感器设置于所述所述标定平台上;所述电动缸电机、电动缸、电动缸支座、双自由度机构、仿生手指串联连接;所述电动缸支座固定于所述标定工装底座上;
[0006]
所述模组用于带动标定平台沿着x方向左右移动;所述电动缸用于带动所述多功能手指沿着z方向上下运动;所述多自由度机构用于实现所述仿生手指7在俯仰和偏转两个方向的角度调整。
[0007]
可选地,所述仿生手指进一步包括:手指指骨、手指皮肤、电极、填充物质、温度敏感元件、指甲盖、通道、信号传输模块、压力传感器、接口、保护壳、卡箍、凹凸密封接口;其中:
[0008]
所述手指指骨的前段由手指皮肤覆盖形成空腔,其内部设置有通道,在通道以及空腔内部充满填充物质,所述手指指骨的后段由保护壳覆盖;通道前端与前述空腔连接,后端与压力传感器连接;压力传感器和信号传输模块的末端都在保护壳内,信号传输模块的前端与温度敏感元件通过电极连接;
[0009]
所述电极和所述信号传输模块设置在所述手指指骨下侧外表面,所述温度敏感元件设置在所述手指指骨的前端;手指皮肤上端设置有指甲盖;所述信号传输模块用于采集所述电极的信号,并将所述信号发送给所述温度敏感元件和所述压力传感器;接口与双自
由度机构连接。
[0010]
可选地,所述手指指骨为刚性绝缘材料,所述手指皮肤为柔性绝缘材料,所述填充物质为导电液体,所述信号传输模块为柔性电路板,在手指皮肤外侧设置有仿生纹路。
[0011]
可选地,所述双自由度机构包括第一转轴、第二转轴,所述第一转轴可带动所述仿生手指进行偏转方向的运动,用于实现所述多功能仿生手指在xy平面内的旋转;
[0012]
所述第二转轴可带动所述仿生手指进行俯仰方向的运动,用于实现所述多功能仿生手指在yz平面内的旋转,即可对所述手指的俯仰角度进行调整;
[0013]
所述第一转轴的两侧分别开设有第一通孔、第二通孔,所述第二转轴的两侧设置第一凸台、第二凸台,二者分别卡入第一通孔、第二通孔中;所述第二转轴的末端设置有第三凸台,第三凸台与仿生手指的末端连接。
[0014]
可选地,所述第一通孔、第二通孔均设置有锯齿,所述第一凸台、第二凸台分别通过锯齿在第一通孔、第二通孔内移动。
[0015]
可选地,在标定工装底座上的x与y方向上面上均匀排布有安装孔,用于安装电动缸支座和模组;所述模组可以在标定工装底座上沿着x方向进行移动。
[0016]
与现有技术相比,本发明的有益效果如下:
[0017]
1、本发明具备同时测量多种物理量的能力,例如对三维力、微振动、作用力等物理量的标定工装,可以有效解决多功能仿生手指使用不便的问题,提高对不同种类物体识别准确率,实现即插即用、准确识别的功能。
[0018]
2、本发明的仿生手指,经过标定工装进行物体物理传感数据信号的采集,经过深度学习算法处理后可以实现对物体类别的识别,可以模拟人的手指,在多关节机器人灵巧手可以实现即插即用,对于残疾人士可以进行手指的康复或者替代,对于机器人抓握的稳定性有重要意义。
[0019]
3、本发明的手指外皮可根据接触力的位置和大小变化产生相应的形变,进而使填充介质的压力及分布状态产生相应的变化,而其绝缘特性保护了手指内部不受外部静电等的干扰。
[0020]
4、本发明的针对手指指骨内部通道进行流体仿真,从而得到最优的内部通道参数、导电介质参数,从而使得在手指表面获得的物理信息在流经手指内部时可以有更小的衰减。
[0021]
5、本发明的指骨结构以及手指皮肤密封效果比以往有很大改善,通过二者之间的凹凸连接以及硅胶密封提高对于压力数据范围的获取以及精度的提升。
[0022]
6、本发明的手指整体结构尺寸减少,内部与力传感器更加契合,对于周围环境温度、微振动、三维力感知精度提升。
[0023]
7、本发明在标定工装上可以通过光电开关实现模组x运动方向的限位。在平台底座上有多组孔,可以实现模组以及电动缸x/y方向位置的改变,相对位置更具有灵活性。
[0024]
8、本发明在仿生手指安装固定处使用双自由度机构,可以实现手指在俯仰、偏转位姿的改变,提高数据获取的多样性。
附图说明
[0025]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、
目的和优点将会变得更明显:
[0026]
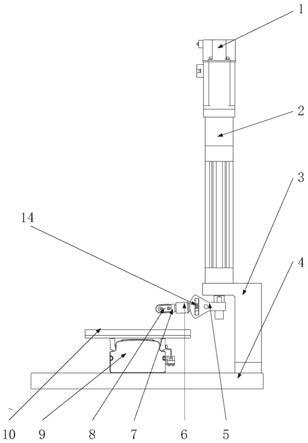
图1为本发明具体实施例一种多功能手指传感器标定工装的侧视图;
[0027]
图2为本发明具体实施例一种多功能手指传感器标定工装的俯视图;
[0028]
图3为本发明具体实施例一种多功能手指传感器标定工装的立体图;
[0029]
图4为本发明具体实施例的多自由度结构的立体图;
[0030]
图5为本发明具体实施例的仿生手指的剖面图;
[0031]
图6为本发明具体实施例的仿生手指的侧视图;
[0032]
图7为本发明具体实施例的仿生手指的立体图。
具体实施方式
[0033]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0034]
如图1至图3,本实施例公开了一种多功能手指传感器标定工装,包括电动缸电机1、电动缸2、电动缸支座3、标定工装底座4、双自由度机构、仿生手指7、模组电机9、标定平台10、光电开关11、模组12、标准力传感器13;其中:
[0035]
所述模组电机9、模组12、光电开关11固定在标定工装底座4上,模组电机9与模组12通过联轴器连接,所述光电开关11在模组12的两侧固定安装;所述标定平台10与模组12固定连接,所述标准力传感器13设置于所述所述标定平台10上;所述电动缸电机1、电动缸2、电动缸支座3、双自由度机构、仿生手指7串联连接;所述电动缸支座3固定于所述标定工装底座4上;所述标定平台上设置有圆形槽,所述标准力传感器13位于圆形槽内。
[0036]
模组负责水平方向移动,对多功能仿生手指进行数据信号的采集。电动缸负责数值方向的运动,调整多功能仿生手指所承受的压力。双自由度关节可以实现俯仰和偏转两个方向的角度调整。
[0037]
所述模组12用于带动标定平台10沿着x方向左右移动;所述电动缸2用于带动所述多功能手指7沿着z方向上下运动;所述多自由度机构用于实现所述仿生手指7在俯仰和偏转两个方向的角度调整。
[0038]
对x方向、y方向、z方向的设定为:平行于标定工装底座的平面为水平面,左右方向为x方向,前后方向为y方向;垂直于水平面的方向为z方向。
[0039]
所述模组电机9的驱动方向是标定平台的水平方向即x方向,所述电动缸电机1的驱动方向是电动缸的抬升方向,即z方向。
[0040]
被测物位于标定平台10上。电动缸2在z方向运动调整位置改变多功能仿生手指的受力,模组12在x方向带动标定平台10运动,被测物位于仿生手指下,与仿生手指接触。模组12带着被测物匀速运动,仿生手指采集被测物的相关数据。
[0041]
本实施例中,模组12是步进电机以及滚珠丝杠、联轴器集成的机构,它可以是类似于传送带的一个装置。这样的传输装置在本领域属于常见技术,这里不再赘述。在模组上方有与标定平台固定连接的安装定位孔。
[0042]
在标定工装底座4上的x与y方向上面上均匀排布有安装孔,用于安装电动缸支座3
和模组12;所述模组12可以在标定工装底座4上沿着x方向进行移动。
[0043]
如图4,所述双自由度机构包括第一转轴5、第二转轴14,所述第一转轴5可带动所述仿生手指7进行偏转方向的运动,用于实现所述多功能仿生手指7在xy平面内的旋转;所述第二转轴14可带动所述仿生手指7进行俯仰方向的运动,用于实现所述多功能仿生手指7在yz平面内的旋转,即可对所述手指的俯仰角度进行调整。
[0044]
所述第一转轴5的两侧分别开设有第一通孔51、第二通孔52,所述第二转轴14的两侧设置第一凸台141、第二凸台,二者分别卡入第一通孔、第二通孔中;所述第二转轴14的末端设置有第三凸台143,第三凸台143与仿生手指7的末端连接。
[0045]
所述第一通孔、第二通孔均设置有锯齿,所述第一凸台、第二凸台分别通过锯齿在第一通孔、第二通孔内移动。第一凸台、第二凸台的形状与锯齿的形状相适配。
[0046]
如图5至图7,所述仿生手指7进一步包括:手指指骨6、手指皮肤15、电极16、填充物质17、温度敏感元件18、指甲盖19、通道21、信号传输模块22、压力传感器23、接口24、保护壳26、卡箍27、凹凸密封接口28;其中:
[0047]
所述手指指骨6的前段由手指皮肤15覆盖形成空腔,其内部设置有通道21,在通道21以及空腔内部充满填充物质17,所述手指指骨6的后段由保护壳26覆盖;通道21前端与前述空腔连接,后端与压力传感器23连接;压力传感器23和信号传输模块22的末端都在保护壳26内,信号传输模块22的前端与温度敏感元件18通过电极16连接;
[0048]
所述电极16和所述信号传输模块22设置在所述手指指骨下侧外表面,所述温度敏感元件18设置在所述手指指骨的前端;手指皮肤上端设置有指甲盖19;所述信号传输模块22用于采集所述电极的信号,并将所述信号发送给所述温度敏感元件和所述压力传感器。接口24与第二转轴14连接。
[0049]
其中,所述信号传输模块22用于采集信号,并对其进行处理,从而得到仿生手指在哪个位置发生了变形的信息。信号传输模块22的功能实现是本领域常用的技术,这里不再具体展开。
[0050]
所述手指指骨6为刚性绝缘材料,所述手指皮肤15为柔性绝缘材料,所述填充物质17为导电液体,所述信号传输模块22为柔性电路板,在手指皮肤15外侧设置有仿生纹路。
[0051]
其中,所述模组固定在底座上面,同时为了实现移动平台在x/y方向的位置移动,需在固定底座的x/y方向均匀打孔,可以实现模组任意方向的移动,标定平台固定安装在模组上面,在模组电机带动下匀速运动,为了防止标定平台运动超过规定位移,借助光电开关进行位移限制,在对仿生手指进行标定时可以获得更加准确均匀的数据;竖直方向上通过电动缸电机带动仿生手指实现竖直位移的改变,从而改变竖直方向上仿生手指的受力,同时也可以在标准力传感器上进行力数据的标定,在进行仿生手指数据采集时,通过双自由度机构可以改变仿生手指的俯仰角度以及偏转角度,可以实现仿生手指在任意方向上运动和数据采集。
[0052]
所述模组是步进电机以及滚珠丝杠、联轴器集成的机构,在模组上方有与标定平台固定连接的安装定位孔,可以实现x方向的运动。
[0053]
所述电动缸结构是由步进电机与滚珠丝杠、电动缸支座组成,实现仿生手指的z方向上下抬升。
[0054]
所述双自由度机构是由两个标有刻度的转动机构构成,可以分别实现俯仰方向、
偏转方向的运动,从而改仿生手指的位姿。
[0055]
所述的信号处理电路上端连接有外部通信电路,下端连接有敏感元件信号传输电路。外部通信电路为后面的手指数据采集以及处理电路。
[0056]
本实施例的标定工装的优点如下:
[0057]
本发明的标定工装相对于传统的工装自由度更多,刚度更大,在电机模组运动过程中产生的基频更小,产生的共振噪音会很小,其移动平台是通过电机控制的,同时调整平台相对于仿生手指的位移与速度以及接触力,可采集在不同工况环境下的纹理和粗糙度信息,标定平台上的标准力传感器,温度传感器可以实现仿生手指的力、温度等数据的标定。
[0058]
仿生手指通过在于物体接触时,手指皮肤15发生形变,使得内部填充物质17的分布压力发生变化,温度会通过内部物质发生传递,手指指骨6外表面分布的电极16会感受各点的阻抗,经信号传输模块22传递信号并进行解析处理得到手指形变特征与三维力,压力传感器23、温度敏感元件18经信号传输模块22得到仿生手指受力大小与温度值,填充物质17主要成分为蒸馏水、氯化钠、乙醇,通过电极3可以更加准确的获取手指接触力的位置和方向。仿生手指在接触物体后,手指外皮发生形变,内部物质发生变化,通过内部电路识别、处理,最终获得目标物体的三维力,通过内部的温度敏感元件、电极分布进而获取目标物体的温度、形状、受力等物理特性,通过深度学习算法对数据进行训练学习实现对物体材质种类的识别,对提升机器人抓握物体的稳定性、对于残疾人士手指的训练康复具有重要意义。
[0059]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1