一种石墨消解机器人及消解方法与流程
[0001]
本发明属于实验仪器技术领域,涉及一种石墨消解装置,具体地说涉及一种全自动的石墨消解机器人及应用其的消解方法。
背景技术:
[0002]
在进行水样、土壤样品、固体废弃物、大气采样、或纺织物样品中的无机元素的测定时,需要对样品进行消解处理。消解处理的作用是破坏有机物、溶解颗粒物,并将各种价态的待测元素氧化成单一高价态或转换成易于分解的无机化合物。消解又被称作湿法消化,是采用酸液或碱液在加热条件下破坏样品中的有机物或还原性物质的方法。
[0003]
目前常规消解方法包括:电热板消解法、微波消解法和石墨消解法,其中,电热板消解法为人工手动操作的方法,其处理效率低,人工成本高,且易对操作人员造成伤害;微波消解法需先将溶剂与样品置入密封消解容器中,再通过微波处理进行消解,样品与溶剂在微波产生的交变磁场作用下,内部分子间剧烈振动和碰撞,使加热物内部的温度迅速升高,在密闭容器里产生高压,具有一定的危险性,对容器的要求也很高,在取出样品前需要较长的冷却降压时间,处理效率较低;石墨消解法采用高纯石墨块作为加热源,其具有优良的导热性,经成型加工的石墨块可对样品进行环绕立体均匀加热,防止了热量散失,消除了同一样品不同位置的温度差,石墨消解法分为手动和自动两种,但是目前自动石墨消解装置仍需人工介入,且处理精度不佳。
技术实现要素:
[0004]
为此,本发明所要解决的技术问题在于传统石墨消解装置自动化程度不足、处理精度优先,从而提出一种精度高的全自动石墨消解机器人及消解方法。
[0005]
为解决上述技术问题,本发明的技术方案为:
[0006]
本发明一方面提供一种石墨消解机器人,其包括:
[0007]
机架,
[0008]
石墨炉,设置于所述机架内部,用于为消解管加热;
[0009]
升降振荡机构,连接于所述机架,用于承载所述消解管,且可带动所述消解管靠近或远离所述石墨炉;
[0010]
多通道加样机构,设置于所述机架一侧,用于向所述消解管内添加试剂,所述多通道加样机构包括加样驱动部,所述加样驱动部一端连接有加样管和所述加样管连接有泵浦机构。
[0011]
作为优选,所述升降振荡机构包括升降底座,所述升降底座包括第一底座部和第二底座部,所述第一底座部和第二底座部分别设置于石墨炉两侧,所述第一底座部远离所述石墨炉的一侧设置有升降驱动部,所述升降驱动部连接有一消解管托架,所述消解管托架还连接有振荡驱动部。
[0012]
作为优选,所述升降振荡机构还包括升降传动组件和振荡传动组件,所述升降传
动组件包括设置于所述升降底座底部的升降传动链条,所述升降传动链条连接于所述升降驱动部,所述振荡传动组件包括设置于所述升降底座底部的振荡传动链条,所述振荡传动链条连接于所述振荡驱动部。
[0013]
作为优选,所述升降传动组件还包括升降动力输入轴,所述升降动力输入轴一端连接于所述升降传动链条,另一端连接于一升降托板;所述振荡传动组件还包括顺次连接的振荡动力输入轴、偏心轴和输出轴,所述振荡动力输入轴连接于所述振荡传动链条,所述输出轴连接于所述消解管托架。
[0014]
作为优选,所述加样驱动部为多关节机器人,所述多关节机器人连接有进液管,所述进液管一端连接于所述泵浦机构另一端连接于所述加样管,所述加样驱动部靠近所述加样管处还设置有超声波测距传感器。
[0015]
作为优选,所述泵浦机构安装于一箱体内,所述加样驱动部连接于所述箱体顶部,所述箱体还连接有无线接收模块,所述无线接收模块外部设置有防腐保护层。
[0016]
作为优选,所述导向轴外部连接有石墨或陶瓷材质轴套;所述加样驱动部具有聚四氟乙烯材质的盖体并通过聚四氟乙烯材质的螺钉连接于所述箱体。
[0017]
作为优选,所述石墨炉连接有一温度传感器,所述温度传感器表面设置有防腐保护层;所述箱体一侧连接有一废液回收机构。
[0018]
作为优选,所述泵浦机构包括蠕动泵和注射泵;所述升降驱动部和振荡驱动部均为步进电机;所述石墨消解装置外部设置有防腐涂层。
[0019]
本发明第二方面提供一种采用所述的石墨消解机器人的消解方法,其包括如下步骤:
[0020]
s1、向消解管内加入消解样品;
[0021]
s2、根据消解样品种类确定消解模式;
[0022]
s3、控制所述多通道加样机构向所述消解管内添加消解试剂;
[0023]
s4、控制所述石墨炉按照预设温度和时间加热;
[0024]
s5、控制所述升降振荡机构升降、摇动,使所述消解管内的混合物冷却;
[0025]
s6、控制所述多通道加样机构向所述消解管内加入定容试剂,并控制所述升降振荡机构摇动,使消解管内的物质振荡;
[0026]
s7、控制所述多通道加样机构再次向所述消解管内加入定容试剂,定容至预设值。
[0027]
本发明的上述技术方案相比现有技术具有以下优点:
[0028]
(1)本发明所述的石墨消解机器人,包括:机架,石墨炉,设置于所述机架内部,用于为消解管加热;升降振荡机构,连接于所述机架,用于承载所述消解管,且可带动所述消解管靠近或远离所述石墨炉;多通道加样机构,设置于所述机架一侧,用于向所述消解管内添加试剂,所述多通道加样机构包括加样驱动部,所述加样驱动部一端连接有加样管,所述加样管连接有泵浦机构。所述全自动石墨消解装置结构紧凑、集成化程度高,加液、加热消解过程均可自动化进行,显著降低了人工成本,提高了操作精度和操作安全性。同时该装置耐腐蚀性好,可再高温、高腐蚀的实验条件下不间断工作。
[0029]
(2)本发明所述的石墨消解机器人,所述升降振荡机构包括升降底座,所述升降底座包括第一底座部和第二底座部,所述第一底座部和第二底座部分别设置于石墨炉两侧,所述第一底座部远离所述石墨炉的一侧设置有升降驱动部,所述升降驱动部连接有一消解
管托架,所述消解管托架还连接有振荡驱动部。升降驱动部和振荡驱动部与石墨炉分隔在两个不相通的空间,石墨炉周边还可设置隔热材料,从而防止了升降驱动部和振荡驱动部长时间受热损坏,进而延长了使用寿命。
[0030]
(3)本发明所述的采用所述石墨消解机器人的消解方法,其可自动设置消解模式,自动控制加样机构添加消解试剂以及石墨炉按照预设温度和时间进行加热消解,以及控制升降振荡机构自动振荡,最终自动获取消解数据结果,该方法全程自动化进行,节省了人力成本,提高了消解效率、制样的标准化程度和精度,同时解决了传统消解方法中溶剂易溅伤操作人员、安全性不足的问题。
附图说明
[0031]
为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明,其中
[0032]
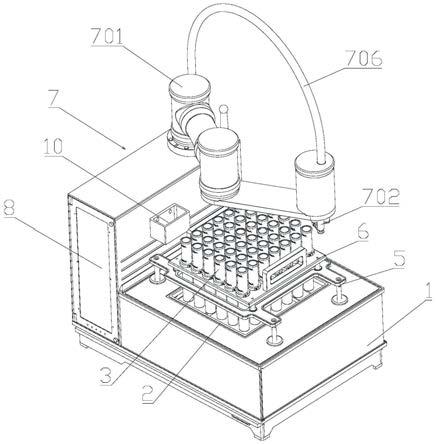
图1是本发明实施例1所述的石墨消解机器人的结构示意图;
[0033]
图2是本发明实施例1所述的石墨消解机器人的分解示意图;
[0034]
图3是本发明实施例1所述的石墨消解机器人中升降振荡机构的结构示意图;
[0035]
图4是本发明实施例1所述的石墨消解机器人中升降振荡机构的剖视图;
[0036]
图5是本发明实施例1所述的石墨消解机器人中加样驱动部的结构示意图。
[0037]
图中附图标记表示为:1-机架;2-石墨炉;201-消解管槽;202-加热管;3-消解管;4-温度传感器;5-升降振荡机构;501-第一底座部;502-第二底座部;503-升降驱动部;504-振荡驱动部;505-消解管托架;506-升降传动链条;507-升降动力输入轴;508-升降托板;509-移动螺母;510-振荡传动链条;511-振荡动力输入轴;512-偏心轴;513-输出轴;514-滚动轴承;515-联轴器;516-导向杆;6-消解管架;7-多通道加样机构;701-加样驱动部;702-加样管;703-超声波测距传感器;704-蠕动泵;705-注射泵;706-进液管;707-加样管挡片;8-箱体;9-无线接收模块;10-废液回收机构。
具体实施方式
[0038]
实施例1
[0039]
本实施例提供一种石墨消解机器人,其用于对水样、土壤、固体废弃物、纺织品等试样进行消解处理,请参阅附图1-2,所述石墨消解机器人包括:
[0040]
机架1,所述机架1用于承载其它部件,所述机架1呈中空长方体结构,其具有一用于容置其它部件的容置腔,所述机架四周设置有装饰玻璃件,底部设置有聚四氟乙烯(ptfe)材质的脚垫,起到支撑所述机架1的作用,聚四氟乙烯材质抗腐蚀性能好,防止了长时间使用下脚垫被腐蚀,且机架1表面设置有防腐层。
[0041]
机架1的容置腔内部设置有石墨炉2,所述石墨炉2用于为消解管3提供均匀的热源,石墨炉2开设有多个用于容置消解管3的消解管槽201,当需要加热时,消解管3被置于石墨炉2的消解管槽201内,石墨导热均匀且迅速,可提高加热效率,所述石墨炉包括炉体和加热管202,所述加热管202连接于外部电源,制热后传到至炉体,所述石墨炉2还连接有一温度传感器4,所述温度传感器4用于测试石墨炉2的温度,并将温度信息传输至控制单元。
[0042]
所述机架1还连接有一升降振荡机构5,所述升降振荡机构5部分设置于所述机架1
的容置腔内,部分设置于所述机架1顶部,所述升降振荡机构5用于承载所述消解管3且可带动消解管3上下移动以靠近或远离所述石墨炉2,同时还可带动消解管3在水平方向摇动以使其内部试样混匀。
[0043]
具体地,请参阅图3-5,所述升降振荡机构5包括升降底座,所述升降底座包括相互分隔设置的第一底座部501和第二底座部502,所述第一底座部501与第二底座部502分别设置于所述石墨炉2的两侧,升降振荡机构5还包括升降驱动部503和振荡驱动机构504,本实施例中,所述升降驱动部503和振荡驱动部504均优选为步进电机,所述升降驱动部503和振荡驱动部504设置于所述第一底座部501远离所述石墨炉2的一侧。升降底座分设于石墨炉两侧,不占用消解装置的高度空间,结合常规通风橱高度尺寸,更符合人体工学高度,可方便操作人员上下料,降低了操作难度和风险性,另外,将升降驱动部503和振荡驱动部504与石墨炉2通过第一底座部501分隔,避免了驱动部长时间受热损坏,从而提高了装置的使用寿命,本实施例优选地,所述石墨炉2周围还设置有隔热材料,用于进一步提高隔热效果。
[0044]
所述升降驱动部503通过传动组件连接有一消解管托架505,所述消解管505放置于一消解管架6上,所述消解管托架505用于承载所述消解管架6,进而承载并带动所述消解管505运动。
[0045]
具体地,所述传动组件包括升降传动组件和振荡传动组件,其中,所述升降传动组件包括设置于所述升降底座底部的升降传动链条506,还包括升降动力输入轴507,所述升降动力输入轴507一端连接于所述升降传动链条506,另一端连接于一升降托板508,升降传动组件用于在升降驱动部503的驱动下带动升降托板508在竖直方向往复运动,所述升降动力输入轴507为一螺杆,所述螺杆外部套设有一移动螺母509,所述移动螺母509顶端连接于所述升降托板508,所述移动螺母509与螺杆啮合连接,升降底座开设有用于容置所述升降动力输入轴507和移动螺母509的升降容置腔,进一步地,第一底座部501、第二底座部502均开设有所述升降容置腔,对应地,第一底座部501、第二底座部502内均设置有结构相同的升降动力输入轴507和移动螺母509,所述升降传动链条506围合成为一环形结构,且同时连接于升降驱动部503的动力输出端、两个升降动力输入轴507。升降驱动部503驱动升降传动链条506运动,所述升降传动链条506带动所述升降动力输入轴507转动,升降动力输入轴507进而驱动移动螺母509沿竖直方向往复运动,从而带动所述升降托板508在竖直方向运动,所述升降托板508又连接于所述消解管托架505,最终带动承载有消解管3的消解管架6在竖直方向运动,实现消解管3的升降,控制消解管3进入或离开石墨炉2。
[0046]
所述振荡传动组件包括设置于所述升降底座底部的振荡传动链条510所述振荡传动链条510,所述振荡传动链条510也为一环形结构,且位于所述升降传动链条506外部,所述振荡传动链条510连接于所述振荡驱动部504的动力输出端。所述振荡传动组件还包括至少一组振荡传动轴,本实施例中,所述第一底座部501和第二底座部502均开设有两个振荡容置腔,每个振荡容置腔内设置有一组振荡传动轴,每个底座部内的2组振荡传动轴对称设置,所述振荡传动轴均包括顺次连接的振荡动力输入轴511、偏心轴512和输出轴513,所述振荡动力输入轴511连接于所述振荡传动链条510,所述输出轴513连接于所述消解管托架5,所述偏心轴512外部设置有一滚动轴承514,作为优选,所述滚动轴承514还可以连接有一联轴器515。所述振荡驱动部504驱动所述振荡传动链条510运动,进而带动与之连接的振荡动力输入轴511转动,振荡动力输入轴511带动偏心轴512转动,偏心轴512进而带动输出轴
513做圆周运动,从而使消解管托架5振荡,使消解管内的物质混合均匀。本实施例中优选地,所述偏心轴512通过所述滚动轴承514连接于所述联轴器515,联轴器515同时连接于输出轴513,联轴器515可保持自身方向不变做圆周运动,可有效控制振荡频率,从而使试剂混合均匀性更好,减小实验偏差;另外,本实施例中,偏心轴512与振荡动力输入轴511和输出轴513一体结构,且多条偏心轴512均衡分布在消解管托架5四周,从而使振荡力度更均匀,混匀效果更好。
[0047]
本实施例中,所述升降传动链条506、振荡传动链条510均为不锈钢链轮链条,采用链条传动的方式,可在两轴中心相距较远的情况下传递动力,并能保证准确的平均传动比,传递效率高,可达0.95-0.97。所述偏心轴512外部还设置有偏心轴套,所述升降托板508与所述偏心轴套连接,偏心轴套可沿所述偏心轴512轴向上下滑动。
[0048]
更进一步地,为了在升降过程中更好地控制运动精度,所述第一底座部501和第二底座部502内还开设有导向腔,所述导向腔内设置有导向杆516,所述导向杆516固定连接于所述升降托板508,为升降托板508的升降运动起到导向支撑作用,每个底座部内设置的导向杆516为2根,对称设置于两组振荡传动轴外侧。所述导向杆516外部还设置有导向杆轴套,所述导向杆轴套可采用石墨或陶瓷材质,具有自润滑、耐高温、耐腐蚀、使用寿命长的优点,可满足消解装置长时间在高温环境下保持平稳运行。
[0049]
请参阅图1-2及图5,所述消解装置还包括:多通道加样机构7,所述多通道加样机构7设置于所述机架1一侧,用于向消解管3内添加试剂,所述多通道加样机构7包括加样驱动部701,所述加样驱动部701的一端连接有加样管702,所述加样管702连接有泵浦机构,所述加样管702内部设置有多个支管,多个支管连通不同的试剂容器,从而实现多通道加样,所述加样驱动部701上还设置有超声波测距传感器703,所述超声波测距传感器703,其用于检测消解管内添加溶液的液位,作为可变换的实施方式,所述超声波测距传感器还可采用其它用于检测液位的传感器装置,比如激光传感器。本实施例中优选地,所述加样管702管口还可拆卸连接有加样管挡片707,超声波测距传感器703端部设置有传感器挡片,其中传感器挡片可防止加液过程中烟雾上飘对传感器产生干扰、影响传感器的检测精度。
[0050]
所述加样驱动部701为多关节机器人,其具有三个旋转关节,关节间通过ptfe材质的护套和塑胶密封圈密封,其中两个关节轴线相互平行,在平面内进行定位和定向。另一个关节是移动关节,用于完成末端件在垂直于平面的运动,该机械臂运行平稳、定位准确,可灵活、精准地向消解管3内添加试剂。机械臂表面设置有防腐涂层,且具有ptfe材质的盖体,并通过ptfe材质的螺钉连接于一箱体8,进一步提高了装置的防腐性能。
[0051]
所述泵浦机构安装于所述箱体8内,所述箱体8安装于所述机架1的一侧,所述加样驱动部701连接于所述箱体8顶部,所述箱体8还连接有无线接收模块9(wifi模块),所述无线接收模块9外部设置有防腐保护层,所述无线接收模块9设置于箱体外部,无金属隔断,无线信号更稳定。箱体8的一侧还连接有一废液回收机构10,本实施例中所述废液回收机构10为一废液盒。
[0052]
所述泵浦机构包括蠕动泵704和注射泵705,其中蠕动泵704每次操作完成后均需手动松脱蠕动泵上压块。所述机械臂连接有进液管706,进液管706一端连接于所述蠕动泵704和注射泵705,另一端连接于所述加样管702,以防止进液管706黏连。
[0053]
箱体8连接有一箱门,可将蠕动泵704和注射泵705隔离在箱体内部,保护泵体,同
时箱门可与箱体通过合页连接,门的开关便于进行松脱蠕动泵上压块的操作。
[0054]
本实施例所述的石墨消解机器人,结构紧凑、集成化程度高,加液、加热消解过程均可自动化进行,显著降低了人工成本,提高了操作精度和操作安全性。同时该装置耐腐蚀性好,可再高温、高腐蚀的实验条件下不间断工作。
[0055]
实施例2
[0056]
本实施例提供一种基于实施例1所述的石墨消解机器人的消解方法,本实施例以土壤的消解处理为例,所述方法包括如下步骤:
[0057]
s1、向消解管内加入5mg土壤作为消解样品。
[0058]
s2、根据消解样品种类确定消解模式,本实施例中选取土壤消解模式。
[0059]
s3、控制所述多通道加样机构向所述消解管内添加消解试剂,所述试剂包括10ml硝酸、46ml高氯酸和2ml氢氟酸。
[0060]
s4、控制所述石墨炉按照预设温度和时间加热并保温,加热温度设置为220℃,并在220℃下保温60min。
[0061]
s5、控制所述升降振荡机构升降、摇动,使所述消解管内的混合物冷却具体地,控制升降震荡机构带动消解管托架升高50mm,并振荡15min,使消解管内的混合物充分混合和冷却。
[0062]
s6、控制所述多通道加样机构向所述消解管内加入20ml定容试剂,本实施例中,所述定容试剂为水,并控制所述升降振荡机构摇动30s,使消解管内的物质再次混合均匀。
[0063]
s7、控制所述多通道加样机构向所述消解管内加入定容试剂,本实施例中,所述定容试剂为水,定容至50ml,完成消解处理后,静置至溶液自然冷却。
[0064]
所述方法可自动设置消解模式,自动控制加样机构添加消解试剂以及石墨炉按照预设温度和时间进行加热消解,以及控制升降振荡机构自动振荡,最终自动完成消解的过程,该方法全程自动化进行,节省了人力成本,提高了消解效率、制样的标准化程度和精度,同时解决了传统消解方法中,溶剂易溅伤操作人员、安全性不足的问题。
[0065]
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1