一种基于磁粒子跟踪的流化床内流场测速方法与流程
[0001]
本发明属于流场测量领域,具体涉及到一种基于磁粒子跟踪的流化床内流场测速方法。
背景技术:
[0002]
流动显示是认知流场内流动介质间相互作用机理、分析流动现象、改进流动设计的重要试验手段,通过各种流动显示实验,可以了解复杂的流动现象,探索其物理机制,为人们发现新的流动现象、建立新的概念和物理模型提供依据。
[0003]
随着光学、激光技术、电子技术以及计算机技术的快速发展,复杂流动内部结构的显示能力及流动信息定量提取和分析处理能力得到了长足的进步,多种流动显示方法已用于科研实验和工程实际,如水洞中常用的有染色线、空气泡、氢气泡、激光-荧光灯方法;低速风洞中常用的有烟线、氦气泡、荧光微丝、油流、激光片光等方法;高速风洞中常用的荧光油流、彩色纹影、全息干涉等方法;流化床中常用的数字图像分析、激光多普勒测速、放射性粒子自动跟踪以及磁共振测量等方法。近年来,由于新一代飞行器研制、新型化学工艺、医学及石油等工业对复杂流动认知的迫切需要,以散班技术、粒子图像测速(particle image velocimetry,piv)、激光诱发荧光和层析技术为代表的新一代非接触式流动测量与显示技术脱颖而出。该类技术因其非侵入式、高精度、可视化、测量信息丰富等优点得到快速发展,兼有定性显示和定量测量的能力,在显示流动结构的同时,可测量密度、温度、速度、压力和浓度等参数,以piv为例的部分测量方法在功能和测量适应性上优势显著,逐步脱颖而出,技术不断发展完善,发展了二维/二分量、二维/三分量、全息/三分量、解析时间、微型等多种piv测量形式,形成了多种品牌的piv商业化产品。
[0004]
随着流动机理研究的深入以及流动细节试验测量的需要,人们开始不仅仅关注流场内粒子的平移速度,也同时关注粒子的旋转速度,以期望更精细地研究流动细节。而以piv为主的图像处理方式在测量粒子的旋转速度时,无法对颗粒球形度较高或者颗粒表面特性比较均匀的颗粒进行旋转运动观察,只能对具有表面局部特征的颗粒或者形状不规则的颗粒进行旋转速度的测量,且测得的旋转角度也仅仅为某一个平面映射下的角度。
技术实现要素:
[0005]
本发明的目的是提出一种能够同时测量粒子平移速度和旋转速度的方法,为流化床内复杂的流动现象提供新的流动显示测量方法。
[0006]
为了实现上述目的,本发明采用如下技术方案:
[0007]
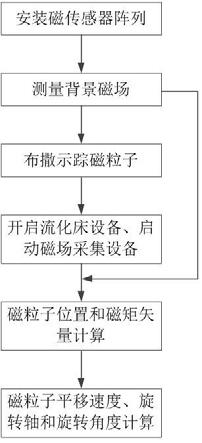
一种基于磁粒子跟踪的流化床内流场测速方法,包括以下步骤:
[0008]
s1:在流化床外壁上设置三轴磁传感器阵列,该阵列中三轴磁传感器的数量不少于两个;
[0009]
s2:制备含一个含有磁性的颗粒,使其与其他无磁性颗粒的外部形状保持一致,并将磁性颗粒与若干个无磁性颗粒混合后设置在流化床内部;
[0010]
s3:同步采集三轴磁传感器阵列的信号,测量得到磁粒子在三轴磁传感器位置处产生的磁矢量场;
[0011]
s4:利用磁粒子在空间任一点产生的磁矢量场的理论计算公式和实际测得的磁传感器阵列的磁矢量场,建立目标函数,所述目标函数为理论值与实测值差量的二范数最小构建目标函数;
[0012]
s5:利用levenberg-marquart算法,使得目标函数值最小,求解得到磁粒子的位置矢量和磁矩矢量;
[0013]
s6:获取在设定时间范围内磁性粒子的最终位置变化的位置矢量差,即可计算出该磁粒子的平移速度,获取在设定时间范围内磁性粒子的最终位置变化的磁矩矢量的旋转角度,即可计算出该磁性粒子的旋转速度。
[0014]
在上述技术中,包括以下步骤:
[0015]
a1:在流化床的外部设置有三轴磁传感器,磁传感器的位置坐标为(x
k
,y
k
,z
k
)
t
,k=1
…
n,其中:n为三轴磁传感器的数量;
[0016]
a2:采集无磁粒子情况下的流化床所处位置的背景磁场
[0017]
a3:在流化床内设置一个磁粒子;
[0018]
a4:开启流化床的流场控制设备使得磁粒子随流场运动,同时启动磁场采集设备,实时采集磁粒子运动时在磁传感器位置处产生的磁矢量场,每个磁传感器测得的实际磁矢量值分别记为
[0019]
a5:磁粒子在每个磁传感器位置处产生的理论磁矢量场定义为
[0020]
构建目标函数:利用levenberg-marquart算法获取磁粒子的位置矢量r=(a,b,c)
t
和磁矩矢量m=(m,n,p);
[0021]
a6:定义r
i
=(a
i
,b
i
,c
i
)
t
为t
i
时刻计算得到的磁粒子的位置矢量,
[0022]
m
i
=(m
i
,n
i
,p
i
)为t
i
时刻计算得到的磁粒子的磁矩矢量,
[0023]
r
i+1
=(a
i+1
,b
i+1
,c
i+1
)
t
为t
i+1
时刻计算得到的磁粒子的位置矢量,
[0024]
m
i+1
=(m
i+1
,n
i+1
,p
i+1
)为t
i+1
时刻计算得到的磁粒子的磁矩矢量,
[0025]
则磁粒子的平移速度计算公式为:
[0026]
磁粒子旋转单位向量为:
[0027]
a7:采用矢量图示法将计算得到的磁粒子在长方体内部的平移速度矢量和旋转速度矢量可视化显示;
[0028]
其中i是自然数。
[0029]
在上述技术方案中,所述磁粒子的旋转向量为三维向量,其方向与旋转轴一致,长
度等于旋转角,所述旋转角为:
[0030]
在上述技术方案中,任一一个三轴磁传感器的误差函数定义为
[0031]
综上所述,由于采用了上述技术方案,本发明的有益效果是:
[0032]
本发明的方法可以不依赖于光学,通过磁性信息跟踪粒子,可以在完全不透明的环境中使用,仅需要三轴磁传感器阵列和高精度数据同步采集卡,试验成本较低。
附图说明
[0033]
本发明将通过例子并参照附图的方式说明,其中:
[0034]
图1基于磁粒子跟踪的内流场测速传感器安装示意图;
[0035]
图2基于磁粒子跟踪的内流场测速方法时序图;
[0036]
图3为第一个磁通门传感器测得的磁矢量信号;
[0037]
图4为估计得到的磁粒子位置矢量信号;
[0038]
图5为磁矩矢量估计结果;
[0039]
图6为磁粒子平移速度;
[0040]
图7为磁粒子一个旋转周期的旋转向量三维示意图;
[0041]
图8为整个测试周期内的旋转角;
[0042]
其中:1~4均为三轴磁传感器。
具体实施方式
[0043]
本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
[0044]
本说明书(包括任何附加权利要求、摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
[0045]
在本发明中,磁粒子跟踪测速时,将具有磁性的粒子在理论上等效为磁偶极子,此时,磁粒子可由六个未知量描述,即磁偶极子的位置矢量和磁矩矢量,且磁矩矢量为m=(m,n,p)的磁偶极子在距离其r=(a,b,c)
t
处产生的磁矢量场b=(b
x
,b
y
,b
z
)可由下式计算得到:
[0046][0047]
其中,μ为介质的磁导率,r=|r|为磁偶极子位置与测量点之间的距离。
[0048]
因此,通过实时测量磁粒子运动时其周围产生的磁矢量场,即可估计得到磁偶极子的位置矢量和磁矩矢量。由于位置矢量和磁矩矢量分别包含三个未知参数,因此,需要至少两个以上的三轴磁传感器测量磁粒子产生的磁矢量信息,才能构建关于位置矢量和磁矩矢量的超定方程组。
[0049]
假设存在n个三轴磁传感器,其中第k个磁传感器的坐标为(x
k
,y
k
,z
k
)
t
,无磁粒子情况下磁传感器测得的流化床所处位置的背景磁场为存在磁粒子时,磁传感器测得的磁粒子产生的磁矢量场及背景磁场的叠加场为而磁粒子在该传感器位置处产生的理论磁矢量值可描述为:
[0050][0051]
式中f表示向量函数。
[0052]
为了求解位置矢量和磁矩矢量,则将第k个传感器的误差函数定义为:
[0053][0054]
进而可通过最小化所有磁传感器的累积误差计算出磁粒子的未知位置矢量和磁矩矢量组成的未知状态向量x=(a,b,c,m,n,p)
t
[0055][0056]
可采用非线性最小二乘法求解上述方程进而获得未知状态向量,本实施例采用levenberg-marquart算法。
[0057]
实施例一
[0058]
本实施例的实施过程如图2所示,包括以下步骤:
[0059]
如图1所示,四个三轴磁通门传感器如图所示安装在流化床的外壁上,采样频率为2000hz,首先采集背景磁场,然后将磁粒子放置于坐标(0m,0.3m,0.6m)处;将直径为2mm、厚度为2mm的圆柱形、材质为钕铁硼、材料性能牌号为n35的小磁铁作为磁粒子布撒至长方体内部,用于测量流化床内部的流场速度。
[0060]
开启流场设备使磁粒子在z=0.6m高度的水平面内绕着垂直中心轴线做匀速旋转运动,旋转半径为0.3m,旋转周期为0.1s,启动磁场采集设备,采集5s时间内每个磁传感器的磁矢量,减去背景磁场即为磁粒子产生的动态磁矢量场,如图3所示为第一个磁通门传感器测得的动态磁矢量信号:如图4所示为采用四个三轴磁通门传感器测得的磁矢量信号估计得到的磁粒子位置矢量信号:如图5所示为磁矩矢量估计结果;如图6所示为磁粒子平移速度;如图7所示为磁粒子一个旋转周期的旋转向量三维示意图;如图8所示为整个测试周期内的旋转角。
[0061]
本发明并不局限于前述的具体实施方式。本发明扩展到任何在本说明书中披露的新特征或任何新的组合,以及披露的任一新的方法或过程的步骤或任何新的组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1