一种基于磁电编码器的双轴陀螺仪标定与解耦方法与流程
[0001]
本发明涉及一种基于磁电编码器的双轴陀螺仪标定与解耦方法,属于仪器标定技术领域。
背景技术:
[0002]
绕一个支点高速转动的刚体称为陀螺。通常所说的陀螺是特指对称陀螺,它是一个质量均匀分布的、具有轴对称形状的刚体,其几何对称轴就是它的自转轴。在一定的初始条件和一定的外在力矩作用下,陀螺会在不停自转的同时,环绕着另一个固定的转轴不停地旋转,人们利用陀螺的力学性质所制成的各种功能的陀螺装置称为陀螺仪,它在科学、技术、军事等各个领域有着广泛的应用。陀螺仪分为,压电陀螺仪,微机械陀螺仪,光纤陀螺仪和激光陀螺仪,它们都是电子式的,并且它们可以和加速度计、磁阻芯片、gps、做成惯性导航控制系统。
[0003]
编码器是将电信号或数据转换成为可用以通讯、传输和存储的信号形式的设备。编码器按照工作原理编码器可分为增量式和绝对式两类,按照本身属性又可以分为光电编码器和磁电编码器。磁电编码器是一种新型的角度或者位移测量装置,其原理是采用磁阻或者霍尔元件对变化的磁性材料的角度或者位移值进行测量,磁性材料角度或者位移的变化会引起一定电阻或者电压的变化,通过放大电路对变化量进行放大,通过单片机处理后输出脉冲信号或者模拟量信号,达到测量的目的。高性能磁电式编码器可广泛应用于工业控制、机械制造、船舶、纺织、印刷、航空、航天、雷达、通讯、军工等领域。
[0004]
然而,在实际工作环境中的惯性平台上由于转轴安装误差、轴承安装误差、加工误差等存在,使得陀螺安装后输入轴也会出现不对准的同轴度偏差,我们通常把这种情况所导致的误差称作是常值陀螺漂移,工作中采用的装置通常可以推算出陀螺的相对漂移量,但是其安装误差还是无法测量,如果惯性系统对于精度要求很高,由于陀螺自身的常值漂移带来的误差就是一个很严重的问题,所以工作中需要对陀螺仪进行标定与解耦,通过配合使用磁电编码器对陀螺进行标定与解耦,可以逐步达到消除这种误差的目的。
[0005]
发明专利内容
[0006]
针对上述问题,本发明提出了一种基于磁电编码器的双轴陀螺仪标定与解耦方法,本发明解决其技术问题的解决方案为:
[0007]
一种基于磁电编码器的双轴陀螺仪标定与解耦方法,本方法应用于基于磁电编码器的双轴陀螺仪;
[0008]
一种基于磁电编码器的双轴陀螺仪标定与解耦方法,所述方法的具体实现过程为:
[0009]
步骤一、垂直方向双轴陀螺仪偏差角的标定与解耦:
[0010]
根据垂直方向双轴陀螺仪测量标定偏差角与解耦示意图,在标定垂直方向的陀螺仪芯片b时,将水平方向的陀螺仪芯片a的测量角速度方向看作是理想的,用水平轴ox表示,大小为ω
x
,将oy轴表示为与水平轴ox垂直的垂直轴,实际工作中垂直方向的陀螺仪芯片b
的测量角速度方向沿着om方向,那么可以两相互垂直的陀螺芯片为会合成一个真实的负载陀螺角速度方向,其沿着on方向,这是由于轴承安装误差的存在、轴承与外壳的同轴度偏差、电机转轴与轴承之间安装误差的存在等造成的,水平方向的外框电机a转动时,垂直方向的磁电编码器b会测得一个与垂直方向上陀螺仪芯片b大小相等的角度值,其方向沿着oy方向,将其积分如公式(1)所示:
[0011][0012]
进而得到垂直方向磁电编码器b测得的角度值,而垂直方向上的陀螺仪的角速度的大小如式(2)所示:
[0013]
ω
y
=ω
om
(i)cosθ1ꢀꢀꢀ
(2)
[0014]
采样当前一个周期内的垂直方向上陀螺仪的ad值的大小a(i),用增益系数g来表示垂直方向上陀螺仪的ad值与当前垂直方向上陀螺仪实际角速度之间关系,如式(3)所示:
[0015]
a(i)=ω
y
(i)(g
ꢀꢀꢀ
(3)
[0016]
根据式(2)和式(3),并对其积分后的关系,如式(4)所示:
[0017][0018]
将式(1)代入上述依据式(4)可以计算出积分后的垂直方向上的陀螺仪芯片b的在当前采样周期内值与垂直方向上磁电编码器的测量角度值之间的关系,如式(5)所示:
[0019][0020]
当垂直方向的内框电机b转动时,垂直方向的磁电编码器会测得一个与垂直方向上陀螺仪芯片b大小相等的角度值,其方向沿着oy方向,重复上述水平方向的外框电机a转动时的计算步骤,可以计算出积分后的垂直方向上的陀螺仪芯片b在当前采样周期内的ad值大小a'(i)与垂直方向上磁电编码器b的测量角度值θ'之间的关系,如式(6)所示:
[0021][0022]
联立式(5)和式(6)即可求得垂直方向陀螺仪的增益系数g与垂直方向上磁电编码器角速度方向与垂直方向陀螺仪芯片角速度方向的夹角θ1;
[0023]
根据在垂直方向上双轴陀螺仪测量标定偏差角与解耦示意图,由空间惯性坐标系的未知关系,陀螺仪的真实角速度ω是确定的并且沿着on方向,其在水平轴ox上的解耦关系式,如式(7)所示:
[0024]
ω
x
=ωcosθ2ꢀꢀꢀ
(7)
[0025]
其在垂直轴om上的解耦关系式,如式(8)所示:
[0026]
ω
om
=ωcos(90
°-
θ
1-θ2)
ꢀꢀꢀ
(8)
[0027]
进一步可以投影得到沿着ng方向的角速度分量,如式(9)所示和mg方向的角速度
分量,如式(10)所示:
[0028]
ω
ng
=ω
x-ω
om
sinθ1ꢀꢀꢀ
(9)
[0029]
ω
mg
=ω
ng
tanθ1ꢀꢀꢀ
(10)
[0030]
合成角速度在与水平轴ox垂直的惯性理想空间坐标系oy轴方向的角速度的解耦关系式,如式(11)所示:
[0031]
ω
y
=ω
om
cosθ
1-ω
ng
tanθ1ꢀꢀꢀ
(11)
[0032]
根据式(9)和式(11)可以化简得到合成角速度在oy轴方向的角速度的解耦关系式,如式(12)所示:
[0033]
ω
y
=ω
om
cosθ
1-ω
x
tanθ1+ω
om
sinθ1tanθ1ꢀꢀꢀ
(12)
[0034]
进一步,将得出的垂直方向上磁电编码器b角速度方向与垂直方向陀螺仪芯片b角速度方向的夹角θ1代入到式(12)即可计算出解耦后的惯性空间坐标系垂直轴上的角速度分量ω
y
;
[0035]
根据上述步骤对垂直方向的陀螺仪进行标定及解耦计算,获得垂直方向的安装偏角θ1=0.0279rad,增益系数g=167.1653;
[0036]
步骤二、水平方向双轴陀螺仪偏差角的标定与解耦:
[0037]
根据水平方向双轴陀螺仪测量标定偏差角与解耦示意图,在标定水平方向的陀螺仪芯片a时,将垂直方向的陀螺仪芯片b的测量角速度方向看作是理想的,用垂直轴oy表示,大小为ω
y1
,将ox轴表示为与垂直轴oy垂直的水平轴,实际工作中水平方向的陀螺仪芯片a的测量角速度方向沿着om1方向,那么可以两相互垂直的两陀螺芯片为会合成一个真实的负载陀螺角速度方向,其沿着on1方向,这是由于轴承安装误差的存在、轴承与外壳的同轴度偏差、电机转轴与轴承之间安装误差的存在等造成的,垂直方向的内框电机转动时,水平方向的磁电编码器会测得一个与水平方向上陀螺仪芯片a大小相等的角度值,其方向沿着ox方向,将其积分如式(13)所示:
[0038][0039]
进而得到水平方向磁电编码器a测得的角度值,而水平方向上的陀螺仪的角速度的大小如式(14)所示:
[0040]
ω
x1
=ω
om1
(i)cosδ2ꢀꢀꢀ
(14)
[0041]
采样当前一个周期内的水平方向上陀螺仪的ad值的大小a1(i),用增益系数g1来表示水平方向上陀螺仪的ad值与当前水平方向上陀螺仪实际角速度之间关系,如式(15)所示:
[0042]
a1(i)=ω
x1
(i)g1ꢀꢀꢀ
(15)
[0043]
根据式(14)和式(15),并对其积分后的关系,如式(16)所示:
[0044][0045]
将式(13)代入上述依据式(16)可以计算出积分后的水平方向上的陀螺仪芯片a的在当前采样周期内值与水平方向上磁电编码器的测量角度值之间的关系,如式(17)所示:
[0046][0047]
当水平方向的内框电机a转动时,水平方向的磁电编码器a会测得一个与水平方向上陀螺仪芯片a大小相等的角度值,其方向沿着ox方向,重复上述垂直方向的内框电机b转动时的计算步骤,可以计算出积分后的水平方向上的陀螺仪芯片a在当前采样周期内的ad值大小a1'(i)与水平方向上磁电编码器a的测量角度值θ1'之间的关系,如式(18)所示:
[0048][0049]
联立式(11)和式(12)即可求得水平方向陀螺仪的增益系数g1与水平方向上磁电编码器a角速度方向与垂直方向陀螺仪芯片a角速度方向的夹角δ2。
[0050]
根据在水平方向上双轴陀螺仪测量标定偏差角与解耦示意图,由空间惯性坐标系的未知关系,陀螺仪的真实角速度ω1是确定的并且沿着on1方向,其在垂直轴oy上的解耦关系式,如式(19)所示:
[0051]
ω
y1
=ωcosδ1ꢀꢀꢀ
(19)
[0052]
其在水平轴om1上的解耦关系式,如式(20)所示:
[0053]
ω
om1
=ω1cos(90
°-
δ
1-δ2)
ꢀꢀꢀ
(20)
[0054]
进一步可以投影得到沿着n1g1方向的角速度分量,如式(21)所示和m1g1方向的角速度分量,如式(22)所示:
[0055]
ω
n1g1
=ω
y1-ω
om1
sinδ2ꢀꢀꢀ
(21)
[0056]
ω
m1g1
=ω
n1g1
tanδ2ꢀꢀꢀ
(22)
[0057]
合成角速度在与垂直轴oy垂直的惯性理想空间坐标系ox轴方向的角速度的解耦关系式,如式(23)所示:
[0058]
ω
x1
=ω
om1
cosδ
2-ω
n1g1
tanδ2ꢀꢀꢀ
(23)
[0059]
根据式(21)和式(23)可以化简得到合成角速度在ox轴方向的角速度的解耦关系式,如式(24)所示:
[0060]
ω
x1
=ω
om1
cosδ
2-ω
y1
tanδ2+ω
om1
sinδ2tanδ2ꢀꢀꢀ
(24)
[0061]
进一步,将得出的水平方向上磁电编码器a角速度方向与水平方向陀螺仪芯片a角速度方向的夹角δ2代入到式(24)即可计算出解耦后的惯性空间坐标系水平轴上的角速度分量ω
x1
;
[0062]
根据上述步骤对水平方向的陀螺仪进行标定及解耦计算,获得水平方向的安装偏角δ2=0.0173rad,增益系数g1=153.64。
[0063]
本发明的有益效果是:
[0064]
1.本装置采用磁电编码器为标定基准,对双轴式陀螺仪进行解耦标定,是一种新型的标定方式,提高了陀螺仪的工作精度,适用于科学、技术、军事等各个领域。
[0065]
2.本装置通过在两垂直方向分别安装磁电编码器和陀螺仪对陀螺仪装置进行标定与解耦,在陀螺仪两方向进行标定时不需要调换装置,提高了工作效率,减少人力物力,提高标定的精准度。
附图说明
[0066]
为了易于说明,本发明由下述的具体实施及附图作以详细描述。
[0067]
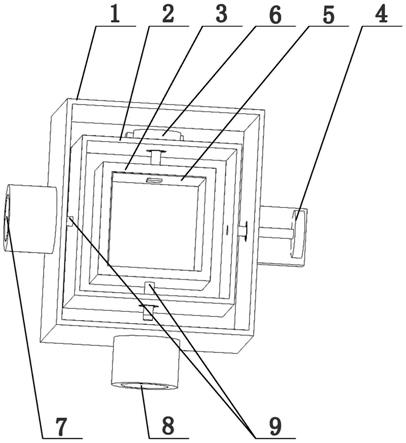
附图1:本发明的整体结构示意图;
[0068]
附图2:本发明的外壳结构拆分示意图;
[0069]
附图3:本发明的外框结构拆分示意图;
[0070]
附图4:本发明的双轴陀螺仪示意图;
[0071]
附图5:本发明的拆分结构示意图;
[0072]
附图6:本发明的垂直方向双轴陀螺仪测量标定偏差角与解耦示意图;
[0073]
附图7:本发明的水平方向双轴陀螺仪测量标定偏差角与解耦示意图;
[0074]
图中:1、外壳;2、外框;3、内框;4、外框电机;5、双轴陀螺仪;6、内框电机;7、磁电编码器a;8、磁电编码器b;9、钢柱;1-1、外壳主体;1-2、圆柱载物台a;1-3、圆柱载物台b;1-4、平面载物台a;1-5、轴承a;2-1、外框主体;2-2、轴承b;2-3、轴承c;2-4、平面载物台b;4-1、外框电机主体;4-2、外框电机转轴;5-1、陀螺仪安装板a;5-2、陀螺仪安装板b;5-3、陀螺仪芯片a;5-4、陀螺仪芯片b;6-1、内框电机主体;6-2、内框电机转轴;7-1、霍尔解算板a;7-2、霍尔元件a;7-3、霍尔元件b;7-4、内部存储器a;7-5、磁钢a;8-1、霍尔解算板b;8-2、霍尔元件c;8-3、霍尔元件d;8-4、内部存储器b;8-5、磁钢b;9-1、钢柱a;9-2钢柱b。
具体实施方式
[0075]
为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图中示出的具体实施例来描述本发明。但应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
[0076]
以下结合附图进一步说明本发明的具体结构及实施方式。
[0077]
如图1、图2、图3、图4、图5、图6、图7所示,本具体实施方式采用以下技术方案:
[0078]
所述的基于磁电编码器的双轴陀螺仪,由外壳1、外框2、内框3、外框电机4、双轴陀螺仪5、内框电机6、磁电编码器a 7、磁电编码器b 8、钢柱9九部分组成,所述的外框电机转轴4-2通过外壳1的轴承a 1-5与外框2焊接,内框电机转轴6-2通过外框2的轴承b 2-2与内框3焊接,外框电机主体4-1与外壳1的平面载物台a 1-4焊接、内框电机主体6-1与外框2的平面载物台b 2-4焊接,磁电编码器a 7的磁钢与钢柱a 9-1胶接,磁电编码器b 8的磁钢与钢柱b 9-2胶接,磁电编码器a 7的霍尔板a 7-1与外壳1的圆柱载物台a 1-2胶接,磁电编码器b 8的霍尔板b 8-1与外壳1的圆柱载物台b 1-3胶接,陀螺仪安装板a 5-1、陀螺仪安装板b 5-2与内框3胶接;所述的外壳1包括:外壳主体1-1、圆柱载物台a 1-2、圆柱载物台b 1-3、平面载物台a 1-4、轴承a 1-5,其中圆柱载物台a 1-2、圆柱载物台b 1-3与外壳主体1-1焊接,轴承a 1-5与外壳主体1-1胶接,平面载物台a 1-4与外壳主体1-1焊接;所述的外框2包括:外框主体2-1、轴承b 2-2、轴承c 2-3、平面载物台b 2-4,其中轴承b 2-2、轴承c 2-3与外框主体2-1胶接,平面载物台b 2-4与外框主体2-1焊接;所述的外框电机4包括:外框电机主体4-1、外框电机转轴4-2,其中外框电机主体4-1与外框电机转轴4-2轴承连接;所述的双轴陀螺仪5包括:陀螺仪安装板a 5-1、陀螺仪安装板b 5-2、陀螺仪芯片a 5-3、陀螺仪芯片b 5-4,其中陀螺仪芯片a 5-3与陀螺仪安装板a 5-1焊锡焊接,陀螺仪芯片b 5-4与陀螺仪安
装板b 5-2焊锡焊接,陀螺仪安装板a 5-1与陀螺仪安装板b 5-2胶接;所述的内框电机6包括:内框电机主体6-1、内框电机转轴6-2,其中内框电机主体6-1与内框电机转轴6-2轴承连接;所述的磁电编码器a 7包括:霍尔解算板a 7-1、霍尔元件a 7-2、霍尔元件b 7-3、内部存储器a 7-4,磁钢a 7-5,其中霍尔元件a 7-2、霍尔元件b 7-3与霍尔解算板a7-1焊锡焊接,内部存储器a 7-4与霍尔解算板a 7-1焊锡焊接;所述的磁电编码器a 8包括:霍尔解算板b 8-1、霍尔元件c 8-2、霍尔元件d 8-3、内部存储器b 8-4,磁钢b 8-5,其中霍尔元件c 8-2、霍尔元件d 8-3与霍尔解算板b 8-1焊锡焊接,内部存储器b 8-4与霍尔解算板b 8-1焊锡焊接;
[0079]
将外框电机4、磁电编码器a 7所在的轴看作是水平轴ox,内框电机6与磁电编码器b 8所在的轴看作是垂直轴oy,在标定垂直方向的陀螺仪芯片b 5-4时,将水平方向的陀螺仪芯片a 5-3的测量值看作是理想值,外框电机4转动,外框电机转轴4-2通过外壳1的轴承a 1-5与外框2焊接,因此外框2转动,垂直方向的陀螺仪芯片b 5-4计算当前周期内采样角速度并进行ad转换后积分,与磁电编码器b 8的基准角度值进行比对,得到双轴陀螺仪5垂直方向与磁电编码器b 8之间的相差的角度值,即为双轴陀螺仪5垂直方向测量的角度值与理想情况下惯性空间在垂直方向的夹角,然后将双轴陀螺仪5的测得实际角度值解耦到水平轴ox和垂直轴oy,得到水平和垂直方向的解耦角度值,在标定水平方向的陀螺仪芯片a 5-3时,将垂直方向的陀螺仪芯片b 5-4的的测量值看作是理想值,内框电机6转动,内框电机转轴6-2通过外框3的轴承轴承b 2-2与内框3焊接,因此内框3转动,水平方向的陀螺仪芯片a 5-3计算当前周期内采样角速度并进行ad转换后积分,与磁电编码器a 7的基准角度值进行比对,得到双轴陀螺仪5水平方向与磁电编码器b 7之间的相差的角度值,即为双轴陀螺仪5水平方向测量的角度值与理想情况下惯性空间在水平方向的夹角,然后将双轴陀螺仪5的测得实际角度值解耦到水平轴ox和垂直轴oy,得到水平和垂直方向的解耦角度值;
[0080]
综上,实现基于磁电编码器的双轴陀螺仪标定与解耦。
[0081]
一种基于磁电编码器的双轴陀螺仪标定与解耦方法,本方法应用于一种基于磁电编码器的双轴陀螺仪;
[0082]
一种基于磁电编码器的双轴陀螺仪标定与解耦方法,所述方法的具体实现过程为:
[0083]
步骤一、垂直方向双轴陀螺仪偏差角的标定与解耦:
[0084]
根据垂直方向双轴陀螺仪测量标定偏差角与解耦示意图,如图6所示,在标定垂直方向的陀螺仪芯片b时,将水平方向的陀螺仪芯片a的测量角速度方向看作是理想的,用水平轴ox表示,大小为ω
x
,将oy轴表示为与水平轴ox垂直的垂直轴,实际工作中垂直方向的陀螺仪芯片b的测量角速度方向沿着om方向,那么可以两相互垂直的陀螺芯片为会合成一个真实的负载陀螺角速度方向,其沿着on方向,这是由于轴承安装误差的存在、轴承与外壳的同轴度偏差、电机转轴与轴承之间安装误差的存在等造成的,水平方向的外框电机a转动时,垂直方向的磁电编码器b会测得一个与垂直方向上陀螺仪芯片b大小相等的角度值,其方向沿着oy方向,将其积分如公式(1)所示:
[0085]
[0086]
进而得到垂直方向磁电编码器b测得的角度值,而垂直方向上的陀螺仪的角速度的大小如式(2)所示:
[0087]
ω
y
=ω
om
(i)cosθ1ꢀꢀꢀ
(2)
[0088]
采样当前一个周期内的垂直方向上陀螺仪的ad值的大小a(i),用增益系数g来表示垂直方向上陀螺仪的ad值与当前垂直方向上陀螺仪实际角速度之间关系,如式(3)所示:
[0089]
a(i)=ω
y
(i)g
ꢀꢀꢀ
(3)
[0090]
根据式(2)和式(3),并对其积分后的关系,如式(4)所示:
[0091][0092]
将式(1)代入上述依据式(4)可以计算出积分后的垂直方向上的陀螺仪芯片b的在当前采样周期内值与垂直方向上磁电编码器的测量角度值之间的关系,如式(5)所示:
[0093][0094]
当垂直方向的内框电机b转动时,垂直方向的磁电编码器会测得一个与垂直方向上陀螺仪芯片b大小相等的角度值,其方向沿着oy方向,重复上述水平方向的外框电机a转动时的计算步骤,可以计算出积分后的垂直方向上的陀螺仪芯片b在当前采样周期内的ad值大小a'(i)与垂直方向上磁电编码器b的测量角度值θ'之间的关系,如式(6)所示:
[0095][0096]
联立式(5)和式(6)即可求得垂直方向陀螺仪的增益系数g与垂直方向上磁电编码器角速度方向与垂直方向陀螺仪芯片角速度方向的夹角θ1。
[0097]
根据在垂直方向上双轴陀螺仪测量标定偏差角与解耦示意图,如图6所示,由空间惯性坐标系的未知关系,陀螺仪的真实角速度ω是确定的并且沿着on方向,其在水平轴ox上的解耦关系式,如式(7)所示:
[0098]
ω
x
=ωcos2θ
ꢀꢀꢀ
(7)
[0099]
其在垂直轴om上的解耦关系式,如式(8)所示:
[0100]
ω
om
=ωcos(90
°-
θ
1-θ2)
ꢀꢀꢀ
(8)
[0101]
进一步可以投影得到沿着ng方向的角速度分量,如式(9)所示和mg方向的角速度分量,如式(10)所示:
[0102]
ω
ng
=ω
x-ω
om
sinθ1ꢀꢀꢀ
(9)
[0103]
ω
mg
=ω
ng
tanθ1ꢀꢀꢀ
(10)
[0104]
合成角速度在与水平轴ox垂直的惯性理想空间坐标系oy轴方向的角速度的解耦关系式,如式(11)所示:
[0105]
ω
y
=ω
om
cosθ
1-ω
ng
tanθ1ꢀꢀꢀ
(11)
[0106]
根据式(9)和式(11)可以化简得到合成角速度在oy轴方向的角速度的解耦关系式,如式(12)所示:
[0107]
ω
y
=ω
om
cosθ
1-ω
x
tanθ1+ω
om
sinθ1tanθ1ꢀꢀꢀ
(12)
[0108]
进一步,将得出的垂直方向上磁电编码器b角速度方向与垂直方向陀螺仪芯片b角速度方向的夹角θ1代入到式(12)即可计算出解耦后的惯性空间坐标系垂直轴上的角速度分量ω
y
;
[0109]
根据上述步骤对垂直方向的陀螺仪进行标定及解耦计算,获得垂直方向的安装偏角θ1=0.0279rad,增益系数g=167.1653;
[0110]
步骤二、水平方向双轴陀螺仪偏差角的标定与解耦:
[0111]
根据水平方向双轴陀螺仪测量标定偏差角与解耦示意图,如图7所示,在标定水平方向的陀螺仪芯片a时,将垂直方向的陀螺仪芯片b的测量角速度方向看作是理想的,用垂直轴oy表示,大小为ω
y1
,将ox轴表示为与垂直轴oy垂直的水平轴,实际工作中水平方向的陀螺仪芯片a的测量角速度方向沿着om1方向,那么可以两相互垂直的两陀螺芯片为会合成一个真实的负载陀螺角速度方向,其沿着on1方向,这是由于轴承安装误差的存在、轴承与外壳的同轴度偏差、电机转轴与轴承之间安装误差的存在等造成的,垂直方向的内框电机转动时,水平方向的磁电编码器会测得一个与水平方向上陀螺仪芯片a大小相等的角度值,其方向沿着ox方向,将其积分如式(13)所示:
[0112][0113]
进而得到水平方向磁电编码器a测得的角度值,而水平方向上的陀螺仪的角速度的大小如式(14)所示:
[0114]
ω
x1
=ω
om1
(i)cosδ2ꢀꢀꢀ
(14)
[0115]
采样当前一个周期内的水平方向上陀螺仪的ad值的大小a1(i),用增益系数g1来表示水平方向上陀螺仪的ad值与当前水平方向上陀螺仪实际角速度之间关系,如式(15)所示:
[0116]
a1(i)=ω
x1
(i)g1ꢀꢀꢀ
(15)
[0117]
根据式(14)和式(15),并对其积分后的关系,如式(16)所示:
[0118][0119]
将式(13)代入上述依据式(16)可以计算出积分后的水平方向上的陀螺仪芯片a的在当前采样周期内值与水平方向上磁电编码器的测量角度值之间的关系,如式(17)所示:
[0120][0121]
当水平方向的内框电机a转动时,水平方向的磁电编码器a会测得一个与水平方向上陀螺仪芯片a大小相等的角度值,其方向沿着ox方向,重复上述垂直方向的内框电机b转动时的计算步骤,可以计算出积分后的水平方向上的陀螺仪芯片a在当前采样周期内的ad值大小a1'(i)与水平方向上磁电编码器a的测量角度值θ1'之间的关系,如式(18)所示:
[0122][0123]
联立式(11)和式(12)即可求得水平方向陀螺仪的增益系数g1与水平方向上磁电编码器a角速度方向与垂直方向陀螺仪芯片a角速度方向的夹角δ2。
[0124]
根据在水平方向上双轴陀螺仪测量标定偏差角与解耦示意图,如图7所示,由空间惯性坐标系的未知关系,陀螺仪的真实角速度ω1是确定的并且沿着on1方向,其在垂直轴oy上的解耦关系式,如式(19)所示:
[0125]
ω
y1
=ωcosδ1ꢀꢀꢀ
(19)
[0126]
其在水平轴om1上的解耦关系式,如式(20)所示:
[0127]
ω
om1
=ω1cos(90
°-
δ
1-δ2)
ꢀꢀꢀ
(20)
[0128]
进一步可以投影得到沿着n1g1方向的角速度分量,如式(21)所示和m1g1方向的角速度分量,如式(22)所示:
[0129]
ω
n1g1
=ω
y1-ω
om1
sinδ2ꢀꢀꢀ
(21)
[0130]
ω
m1g1
=ω
n1g1
tanδ2ꢀꢀꢀ
(22)
[0131]
合成角速度在与垂直轴oy垂直的惯性理想空间坐标系ox轴方向的角速度的解耦关系式,如式(23)所示:
[0132]
ω
x1
=ω
om1
cosδ
2-ω
n1g1
tanδ2ꢀꢀꢀ
(23)
[0133]
根据式(21)和式(23)可以化简得到合成角速度在ox轴方向的角速度的解耦关系式,如式(24)所示:
[0134]
ω
x1
=ω
om1
cosδ
2-ω
y1
tanδ2+ω
om1
sinδ2tanδ2ꢀꢀꢀ
(24)
[0135]
进一步,将得出的水平方向上磁电编码器a角速度方向与水平方向陀螺仪芯片a角速度方向的夹角δ2代入到式(24)即可计算出解耦后的惯性空间坐标系水平轴上的角速度分量ω
x1
;
[0136]
根据上述步骤对水平方向的陀螺仪进行标定及解耦计算,获得水平方向的安装偏角δ2=0.0173rad,增益系数g1=153.64。
[0137]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1