一种基于毫米波雷达的轨道识别方法与流程
[0001]
本发明属于智能轨道交通领域,具体设计了一种基于毫米波雷达的轨道识别方法。
背景技术:
[0002]
障碍物入侵列车限界是影响正常列车行车安全的重要因素。对于轨道车辆车载主动障碍物检测系统,有效识别轨道的位置是判断障碍物入侵限界的关键步骤。此外,准确的轨道识别也可用于预测列车的行驶方向。
[0003]
目前阶段用于轨道车辆主动障碍物检测的轨道识别大多基于摄像机图像的视觉探测。也有国外学者研究使用激光雷达识别钢轨的位置。“用于铁路交通中的车道识别、尤其用于轨道交通中的铁轨识别的方法、设备和铁路车辆、尤其轨道车辆”(申请公开号cn 110325425a)和“基于计算机视觉的无人机铁路轨道线路识别方法”(申请公开号cn 201910625187.7)申请了基于视觉的轨道车辆的设备需要满足在轨道识别方案。“基于曲线拟合的轨道图像识别后处理方法”(申请公开号cn 201811379681.1)申请了一种基于曲线拟合的轨道图像识别后处理方法。上述专利均基于视觉图像处理手段实现对轨道位置的检测。“基于毫米波交通雷达的公路车到自动识别方法”(专利号cn10134954a)公开了一种通过处理雷达回波功率和自学习手段检测公路车道边界的方法,其实现目的和具体实现方法与本专利均不相同。
[0004]
轨道列车设备需要在不同的天气环境下均能正常工作,但是摄像机和激光雷达在大雨大雾天气下检测效果不佳,基于上述设备的轨道识别方法在恶劣天气环境下难以产生正确的输出。毫米波雷达相比于激光雷达和摄像机,其工作性能受天气因素较小,能够实现全天候的正常工作。由于钢轨为金属材质,且在轨道中占有较大的体积,因此容易反射毫米波。在高架、隧道等多种路况下,毫米波雷达均对钢轨敏感,受多径效应影响较小。利用上述钢轨的特点,可以使用毫米波雷达识别钢轨的位置。
技术实现要素:
[0005]
有鉴于此,本发明针对现有技术上无法满足全天候轨道识别的机制缺陷,提供一种可以解决上述缺陷的基于毫米波雷达的轨道识别方法,可以通过毫米波雷达簇数据计算得到描述轨道左右钢轨位置的空间表达式。
[0006]
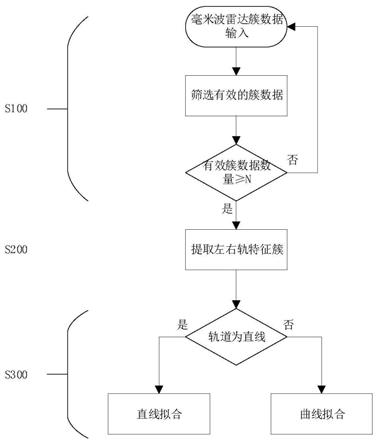
本发明公开的基于毫米波雷达的轨道识别的方法,包括:s100:根据毫米波雷达簇数据的速度信息筛选有效数据;s200:利用有效的簇数据在空间的分布关系对簇进行分类,选出可以定位轨道左右钢轨位置的特征簇;s300:根据特征簇的空间位置轨道特征进行曲线拟合,实现轨道识别。
[0007]
上述利用毫米波雷达输出的簇数据,通过筛选有效数据,提取特征簇和轨道拟合,实现对轨道快速、有效的识别。
[0008]
进一步的,上述s100具体为s1001:收集当前时刻的雷达簇数据,记为{c1,c2,c3......c
n
}。对于其中的一种任意一个簇c
i
,包括横坐标数据x
i
,纵坐标数据y
i
,横向速度数据v
xi
和纵向速度数据v
yi
。s1002:根据横向速度和纵向数据设置自适应的速度阈值上下限v
uthr
、v
lthr
,其计算方式可表示为:式可表示为:s1003:根据横向速度和纵向数据设置自适应的角度阈值上下限θ
uthr
、θ
lthr
,其计算方式可表示为:式可表示为:s1004:对于任意的簇c
i
,根据横向速度和纵向速度数据可以计算该簇的总速度和运行角度若v
i
>v
uthr
或v
i
<v
lthr
,则判断该簇无效。若θ
i
>θ
uthr
或θ
i
<θ
lthr
,同样判断该簇无效。s1005:记经过s1004筛选后的簇数据为{c
′1,c
′2,c
′3......c
′
m
}。若被筛选后的簇数量小于n,则认为本次采样无效,直接进行下一次采样并执行s100;若剩余簇数量大于等于 n,则依次执行s200、s300。
[0009]
通过s100,利用簇的速度信息筛选出雷达采样正确的数据,防止错误的簇数据对计算结果造成影响。
[0010]
进一步的,上述s200具体为s2100:计算密度可达簇。s2200:提取左右轨特征簇。
[0011]
进一步的,上述s2100具体为s2101:对于任意一个经过s100筛选后的簇c
′
i
,其对应的位置坐标为x
′
i
,y
′
i
。若在坐标(x
′
i
±
ε
x
,y
′
i
±
ε
y
)范围内有其他簇c
′
j
,则认为c
′
j
是c
′
i
的密度直达簇。其中,ε
x
和ε
y
为密度直达簇的计算参数。计算{c
′1,c
′2,c
′3......c
′
m
}每一个簇对应的密度直达簇。s2102:。若c
′
i
与c
′
k
通过密度直达簇相连,则c
′
k
为c
′
i
的密度可达簇。计算 {c
′1,c
′2,c
′3......c
′
m
中每一个簇所对应的密度可达簇。
[0012]
进一步的,上述s2200具体为:s2201:选取密度可达簇中最多的两个簇及其对应的密度可达簇分别作为两组钢轨特
征簇。s2201:计算两组特征簇的横坐标平均值,其中平均横坐标较小的为左轨特征簇,平均横坐标较大的为右轨特征簇。记左轨特征簇为{c
′
l1
,c
′
l2
,c
′
l3
......c
′
lp
},右轨特征簇为 {c
′
r1
,c
′
r2
,c
′
r3
......c
′
rq
}。
[0013]
通过s200利用簇数据的分布密度,够进一步从有效的簇数据中提取出由于雷达波束打到钢轨上反射所产生的结果。
[0014]
进一步的,上述s300具体为:s3100:计算特征簇的特征检验系数。s3200:根据特征系数使用不同曲线对轨道左右轨进行拟合。
[0015]
进一步的,上述s3100具体为:s3101:对于任意的左轨特征簇c
′
li
,其对应的坐标为(x
′
li
,y
′
li
)。计算左轨特征簇横坐标与纵坐标之间的特征检验系数r
l
(x
′
li
,y
′
li
),即:s3102:对于任意的左轨特征簇c
′
ri
,其对应的坐标为(x
′
ri
,y
′
ri
)。计算左轨特征簇横坐标与纵坐标之间的特征检验系数r
r
(x
′
ri
,y
′
ri
),即:
[0016]
进一步的,上述s3200具体为:s3201:若r
l
和r
r
均大于等于m
r
,分别对左轨和右轨使用一次函数x=ay+b进行拟合;s3202:若r
l
或r
r
小于m
r
,使用二项式指数曲线x=ae
by
+ce
dy
进行拟合。s3203:其中,s3201和s3202提到的拟合曲线中,x,y表示拟合曲线横纵坐标,a、 b、c、d为拟合参数,可根据特征簇的横纵坐标关系通过最小二乘法确定。s3204:其中,s3201和s3202提到的m
r
为经验系数,默认值设为0.6。
[0017]
本发明的优越性在于:(1)该算法计算不依赖于强大算力,能够在算力受限情况下以较快速度完成识别。(2)算法识别流程仅依赖少量先验参数,无需依赖大量数据进行前期模型学习。(3)该算法识别不受天气和光照影响,且受毫米波雷达的杂波干扰影响较小,具有较强的鲁棒性。
附图说明
[0018]
图1为本发明的车载配置图。
[0019]
图2为本发明在实施方式案例中推荐的设备安装位置。
[0020]
图3为本发明的实施的效果图。
[0021]
图4为本发明的算法流程图。
具体实施方式
[0022]
首先在列车上安装带有毫米波雷达的车载主动障碍物检测系统,如图一所示。该系统主要包括毫米波雷达、摄像机、二次雷达、预警主机、监控屏等设备。与本发明相关的设备主要为毫米波雷达和预警主机。毫米波雷达用于发送和接收毫米波,预警主机通过本方法处理毫米波雷达数据,识别轨道位置。毫米波雷达的推荐安装位置如图2 所示,可安装在1车头外侧或2司机室挡风玻璃内侧,其余设备可根据实际情况选择安装位置。毫米波雷达通过通信总线与预警主机相连。
[0023]
预警主机通过通信总线接收毫米波雷达发送回的簇数据,选取距时间戳相差小于5ms的数据作为当前时刻的簇数据,记为{c1,c2,c3......c
n
}。根据横向速度和纵向数据设置自适应的速度阈值上下限v
uthr
、v
lthr
和角度阈值上下限θ
uthr
、θ
lthr
。计算簇的总速度v
i
和运行角度θ
i
仅保留速度和运动角度均符合s1004的簇作为有效的数据。若被筛选后的簇数量小于n,则认为本次采样无效,直接进行下一次采样并执行s100;若剩余簇数量大于等于n,则依次执行s200、s300。其中n为经验参数,默认为15,其大小可在正式使用前根据实际的测量情况进行调整。根据s2101和s2102的定义对筛选后的簇进行处理,计算得到每一个簇对应的密度可达簇,并选取密度可达簇中最多的两个簇及其对应的密度可达簇分别作为两组钢轨特征簇。为了有效判断前方线路情况减少曲线过拟合,并加快计算速度,计算左右钢轨的特征检验系数r
l
和r
r
,使用两种曲线对钢轨进行拟合。当在r
l
和r
r
均大于m
r
时,分别对左轨和右轨分别使用一次函数x=ay+b进行拟合;否则使用二项式指数曲线x=ae
by
+ce
dy
分别对左右轨特征簇进行拟合。其中,m
r
为经验参数,默认取0.6;(x,y)表示拟合曲线横纵坐标;a、b、c、d为拟合参数,可根据特征簇所对应的坐标进行最小二乘法拟合得到用于描述轨道位置的曲线。
[0024]
图3为本发明的一个具体实施例的识别结果。包括摄像头拍摄的图像及毫米波雷达在拍摄图像区域所对应的识别结果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1