一种鱼群探测无人船的制作方法
[0001]
本发明属于鱼群探测技术领域,涉及一种鱼群探测无人船。
背景技术:
[0002]
大型围网养殖具有空间大、环境自然生态、养殖产品品质高, 逐步成为海洋高端养殖的新模式和主力军。
[0003]
由于大型围网养殖的水域面积较大,养殖对象的活动空间大, 在投喂料时,使用带有鱼群探测器的无人船在养殖水域内航行, 探测养殖对象的活动地点,由于无人船上常用的鱼群探测器探测 精度不高,需要探测的时间较长,而且很难精确掌握养殖对象的 活动地点和觅食规律;此外,捕捞时需要探测鱼群的位置,使用 常用的探测器也无法快速找到起捕位置,费时费力。
技术实现要素:
[0004]
本发明的目的是针对现有的技术存在上述问题,提出了一种 鱼群探测无人船,能够根据需要调节探测装置的探测方向和探测 面积,提高无人船的探测效率。
[0005]
本发明的目的可通过下列技术方案来实现:
[0006]
一种鱼群探测无人船,包括无人船和探测装置,所述探测装 置设置在无人船的底部,所述探测装置包括装置本体,所述装置 本体呈圆柱状,所述装置本体的圆弧侧壁上同轴开设有环形凹槽;
[0007]
固定杆,所述固定杆沿径向固设在环形凹槽的底部,所述固 定杆上设有两个第一限位凸沿,位于两个第一限位凸沿之间的固 定杆上滑动设置有第一套管,所述固定杆远离装置本体的一端固 设有第一探测雷达;
[0008]
两个辅助探测机构,两个所述辅助探测机构均设置在环形凹 槽内且分别位于固定杆的两侧,所述辅助探测机构具有:若干个 转动杆,若干个所述转动杆均通过转动结构沿径向活动设置在环 形凹槽的底部,所述转动杆能够绕环形凹槽的轴线做周向运动, 所述转动杆上设有两个第二限位凸沿,位于两个第二限位凸沿之 间的转动杆上滑动设置有第二套管,所述转动杆远离装置本体的 一端固设有第二探测雷达;第一连动结构,所述第一连动结构设 置在固定杆和靠近固定杆的转动杆之间,所述第一连动结构能够 改变固定杆和转动杆之间的角度;若干个第二连动结构,若干个 所述第二连动结构分别设置在两个相邻的转动杆之间,所述第二 连动结构能够改变两个相邻转动杆之间的角度。
[0009]
在上述的鱼群探测无人船中,所述装置本体内开设有安装腔, 所述转动结构包括:
[0010]
固定轴,所述固定轴同轴固设在安装腔内;
[0011]
弧形通孔,所述弧形通孔沿周向开设在环形凹槽的底部,若 干个所述转动杆远离第二探测雷达的一端均穿过弧形通孔延伸至 安装腔内且端部固设有连接板,所述连接板远离转动杆的一侧固 设有转动板,所述转动板转动设置在固定轴上。
[0012]
在上述的鱼群探测无人船中,位于环形凹槽内的转动杆上同 轴转动设置有导向滚轮,所述导向滚轮的轮面始终接触环形凹槽 的下侧面。
[0013]
在上述的鱼群探测无人船中,所述第一连动结构包括:
[0014]
第一连杆,所述第一连杆的一端铰接在固定杆靠近装置本体 的一端,另一端铰接在与固定杆相邻的转动杆的第二套管上;
[0015]
第二连杆,所述第二连杆的一端铰接在固定杆的第一套管上, 另一端铰接在与固定杆相邻的转动杆靠近装置本体的一端上,所 述第二连杆和第一连杆的中部通过第一铰接轴铰接在一起;
[0016]
第一驱动结构,所述第一驱动机构设置在固定杆上,所述第 一驱动结构能够带动第一套管在两个第一限位凸沿之间来回滑 动。
[0017]
在上述的鱼群探测无人船中,所述第一驱动结构包括:
[0018]
第一固定板,所述第一固定板竖直固设在固定杆的上侧面上;
[0019]
第二固定板,所述第二固定板竖直固设在第一套管的上侧面 上;
[0020]
液压油缸,所述液压油缸的底座端铰接在第一固定板上,所 述液压油缸的活塞杆端铰接在第二固定板上。
[0021]
在上述的鱼群探测无人船中,所述第二连动结构包括:
[0022]
第三连杆,所述第三连杆的一端铰接在其中一个转动杆靠近 装置本体的一端,另一端铰接在相邻转动杆的第二套管上;
[0023]
第四连杆,所述第四连杆的一端铰接在其中一个转杆杆的第 二套管上,另一端铰接在相邻转动杆靠近装置本体的一端,所述 第四连杆和第三连杆的中部通过第二铰接轴铰接在一起。
[0024]
在上述的鱼群探测无人船中,所述装置本体的上侧面同轴转 动设置有圆管,所述圆管的上端设有顶板,所述圆管内设有第二 驱动结构,所述第二驱动结构能够带动装置本体转动。
[0025]
在上述的鱼群探测无人船中,所述第二驱动结构包括:
[0026]
齿圈,所述齿圈同轴固设在圆管的内侧壁上;
[0027]
第一电机,所述第一电机固设在圆管的内侧壁上,所述第一 电机的输出轴上固设有第一齿轮,所述第一齿轮和齿圈啮合连接。
[0028]
在上述的鱼群探测无人船中,所述安装腔内对称设有两个连 接柱,所述连接柱的两端分别与安装腔的上下侧面固连。
[0029]
在上述的鱼群探测无人船中,所述装置本体的底部设有若干 个穿孔,若干个所述穿孔均与安装腔的底部相连通。
[0030]
与现有技术相比,本发明具有以下优点:
[0031]
1、安装有探测装置的无人船在养殖水域内航行,不断探测水 底的鱼群,当需要集中探测指定方向时,启动第一连动结构和第 二连动结构,使若干个转动杆向靠近固定杆的方向转动,使若干 个第二探测雷达逐渐向第一探测雷达靠拢,实现对指定方向的集 中定向探测,提高探测精度;当需要增大探测范围时,启动第一 连动结构和第二连动结构,使若干个转动杆逐渐向固定杆的方向 转动,使若干个第二探测雷达逐渐远离第一探测雷达,若干个第 二探测雷达围绕在整个装置本体的四周,实现对无人船周围水域 的全方位探测,
提高探测效率;
[0032]
2、转动杆通过连接板和转动板转动设置在固定轴上,通过第 一连动结构和若干个第二连动结构,使转动杆可以绕着固定轴和 装置本体做周向运动并固定在任意位置,改变第一探测雷达和若 干个第二探测雷达的间距,实现集中或者全方位探测,操作简单;
[0033]
3、当转动杆绕着固定轴转动时,导向滚轮沿着环形凹槽的下 侧面滚动,使转动杆能够绕着弧形通孔顺畅转动,不会卡住;
[0034]
4、启动第一驱动结构,带动第一套管沿着固定杆向远离装置 本体的一端滑动,通过第二连杆带动与固定杆相邻的转动杆向靠 近固定杆的方向转动,第一连杆和第二连杆之间的夹角减小,第 一连杆推动第二套管沿着转动杆向远离装置本体的方向滑动,使 第二探测雷达逐渐向第一探测雷达靠拢,实现集中探测;启动第 一驱动结构,带动第一套管沿着固定杆向靠近装置本体的一端滑 动,通过第二连杆带动与固定杆相邻的转动杆向远离固定杆的方 向转动,第一连杆和第二连杆之间的夹角增大,第一连杆拉动第 二套管沿着转动杆向靠近装置本体的方向滑动,使第二探测雷达 逐渐远离第一探测雷达,增加探测范围;
[0035]
5、当第一套管沿着固定杆向远离装置本体的方向滑动时,通 过第一连杆和第二连杆带动与固定杆相邻的转动杆上的第二套管 沿着转动杆向远离装置本体的方向滑动,使第三连杆和第四连杆 之间的夹角减小,相邻的两个转动杆相互靠拢,对应的两个第二 探测雷达也相互靠拢,提高探测精度;当第一套管沿着固定杆向 靠近装置本体的方向滑动时,通过第一连杆和第二连杆带动与固 定杆相邻的转动杆上的第二套管也沿着转动杆向靠近装置本体的 方向滑动,使第三连杆和第四连杆之间的夹角增大,相邻的两个 转动杆相互远离,对应的两个第二探测雷达也相互远离,使若干 个第二探测雷达围绕在装置本体的四周,增加探测范围;
[0036]
6、当需要集中探测指定方向时,启动第一驱动结构,使第一 套管沿着固定杆向远离装置本体的方向滑动,使转动杆逐渐靠近 固定杆,若干个第二探测雷达相互靠拢第一探测雷达,然后启动 第二驱动结构,带动装置本体绕着圆管转动,使第一探测雷达正 对指定的探测方向,省去了改变无人船航行方向的麻烦,提高探 测效率。
附图说明
[0037]
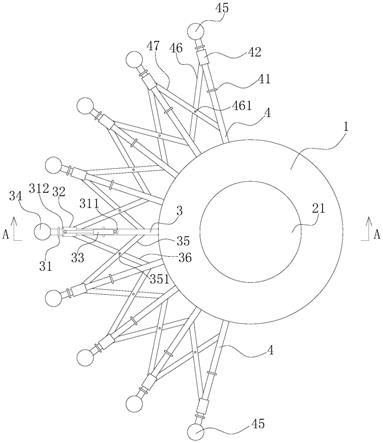
图1是发明的结构示意图;
[0038]
图2是图1中a-a处的剖视图;
[0039]
图3是图2中b-b处的剖视图;
[0040]
图4是图3中c-c处的剖视图。
[0041]
图中,1、装置本体;11、安装腔;12、环形凹槽;13、弧形 通孔;14、连接柱;15、固定轴;16、穿孔;2、圆管;21、顶板; 22、齿圈;23、第一电机;231、第一齿轮;3、固定杆;31、第 一限位凸沿;311、第一固定板;312、第二固定板;32、第一套 管;33、液压油缸;34、第一探测雷达;35、第一连杆351、第 一铰接轴;36、第二连杆;4、转动杆;41、第二限位凸沿;42、 第二套管;43、导向滚轮;44、连接板;441、转动板;45、第二 探测雷达;46、第三连杆;461、第二铰接轴;47、第四连杆;5、 无人船。
具体实施方式
[0042]
以下是本发明的具体实施例并结合附图,对本发明的技术方 案作进一步的描述,但本发明并不限于这些实施例。
[0043]
如图1至4所示,一种鱼群探测无人船,包括无人船5和探 测装置,所述探测装置包括装置本体1、固定杆3和两个辅助探 测机构。
[0044]
所述装置本体1呈圆柱状,所述装置本体1的圆弧侧壁上同 轴开设有环形凹槽12。
[0045]
所述固定杆3沿径向固设在环形凹槽12的底部,所述固定杆 3上设有两个第一限位凸沿31,位于两个第一限位凸沿31之间的 固定杆3上滑动设置有第一套管32,所述固定杆3远离装置本体 1的一端固设有第一探测雷达34。
[0046]
两个所述辅助探测机构均设置在环形凹槽12内且分别位于 固定杆3的两侧,所述辅助探测机构包括若干个转动杆4、第一 连动结构和若干个第二连动结构。
[0047]
若干个所述转动杆4通过转动结构沿径向活动设置在环形凹 槽12的底部,所述转动杆4能够绕环形凹槽12的轴线做周向运 动,所述转动杆4上设有两个第二限位凸沿41,位于两个第二限 位凸沿31之间的转动杆4上滑动设置有第二套管42,所述转动 杆4远离装置本体1的一端固设有第二探测雷达45。
[0048]
所述第一连动结构设置在固定杆3和靠近固定杆3的转动杆 4之间,所述第一连动结构能够改变固定杆3和转动杆4之间的 角度。
[0049]
若干个所述第二连动结构分别设置在两个相邻的转动杆4之 间,所述第二连动结构能够改变两个相邻转动杆4之间的角度。
[0050]
安装有探测装置的无人船5在养殖水域内航行,不断探测水 中的鱼群,当需要集中探测指定方向时,启动第一连动结构和第 二连动结构,使若干个转动杆4向靠近固定杆3的方向转动,使 若干个第二探测雷达45逐渐向第一探测雷达34靠拢,实现对指 定方向的集中定向探测,提高探测精度;当需要增大探测范围时, 启动第一连动结构和第二连动结构,使若干个转动杆4逐渐向固 定杆3的方向转动,使若干个第二探测雷达45逐渐远离第一探测 雷达34,若干个第二探测雷达45围绕在整个装置本体1的四周, 实现对无人船5周围水域的全方位探测,提高探测效率。
[0051]
具体来说,所述装置本体1内开设有安装腔11,所述转动结 构包括固定轴15和弧形通孔13。
[0052]
所述固定轴15同轴固设在安装腔11内。
[0053]
所述弧形通孔13沿周向开设在环形凹槽12的底部,所述弧 形通孔13的两端分别对称设置在固定杆3的两侧,若干个所述转 动杆4远离第二探测雷达45的一端均穿过弧形通孔13延伸至安 装腔11内且端部固设有连接板44,所述连接板44远离转动杆4 的一侧固设有转动板44,所述转动板44转动设置在固定轴15上。
[0054]
转动杆4通过连接板44和转动板441转动设置在固定轴15 上,通过第一连动结构和若干个第二连动结构,使转动杆4可以 绕着固定轴15和装置本体1做周向运动并固定在任意位置,改变 第一探测雷达34和若干个第二探测雷达45的间距,实现集中或 者全方位探测,操作简单。
[0055]
具体来说,位于环形凹槽12内的转动杆4上同轴转动设置有 导向滚轮43,所述导向滚轮43的轮面始终接触环形凹槽12的下 侧面。
[0056]
当转动杆4绕着固定轴15转动时,导向滚轮43沿着环形凹 槽12的下侧面滚动,使转动杆4能够绕着弧形通孔13顺畅转动, 不会卡住。
[0057]
具体来说,所述第一连动结构包括第一连杆35、第二连杆36 和第一驱动结构。
[0058]
所述第一连杆35的一端铰接在固定杆3靠近装置本体1的一 端,另一端铰接在与固定杆3相邻的转动杆4的第二套管42上。
[0059]
所述第二连杆36的一端铰接在固定杆3的第一套管32上, 另一端铰接在与固定杆3相邻的转动杆4靠近装置本体1的一端 上,所述第二连杆36和第一连杆35的中部通过第一铰接轴351 铰接在一起。
[0060]
所述第一驱动机构设置在固定杆3上,所述第一驱动结构能 够带动第一套管32在两个第一限位凸沿31之间来回滑动。
[0061]
启动第一驱动结构,带动第一套管32沿着固定杆3向远离装 置本体1的一端滑动,通过第二连杆36带动与固定杆3相邻的转 动杆4向靠近固定杆3的方向转动,第一连杆35和第二连杆36 之间的夹角减小,第一连杆35推动第二套管42沿着转动杆4向 远离装置本体1的方向滑动,使第二探测雷达45逐渐向第一探测 雷达34靠拢,实现集中探测;启动第一驱动结构,带动第一套管 32沿着固定杆3向靠近装置本体1的一端滑动,通过第二连杆36 带动与固定杆3相邻的转动杆4向远离固定杆3的方向转动,第 一连杆35和第二连杆36之间的夹角增大,第一连杆35拉动第二 套管42沿着转动杆4向靠近装置本体1的方向滑动,使第二探测 雷达45逐渐远离第一探测雷达34,增加探测范围。
[0062]
具体来说,所述第一驱动结构包括第一固定板311、第二固 定板312和液压油缸33。
[0063]
所述第一固定板311竖直固设在固定杆3的上侧面上。
[0064]
所述第二固定板312竖直固设在第一套管32的上侧面上。
[0065]
所述液压油缸33的底座端铰接在第一固定板311上,所述液 压油缸33的活塞杆端铰接在第二固定板312上。
[0066]
优选地,所述液压油缸33为电液式液压油缸。
[0067]
当需要集中探测时,启动液压油缸33使其伸长,推动第一套 管32沿着固定杆3向远离装置本体1的方向滑动,通过第一连杆 35和第二连杆36,带动与固定杆3相邻的转动杆4向靠近固定杆3的方向转动,当需要增加探测范围时,启动液压油缸33使其缩 短,拉动第一套管32沿着固定杆3向靠近装置本体1的方向滑动, 通过第一连杆35和第二连杆36,带动与固定杆3相邻的转动杆4 向远离固定杆3的方向转动,传动效率高。
[0068]
具体来说,所述第二连动结构包括第三连杆46和第四连杆 47。
[0069]
所述第三连杆46的一端铰接在其中一个转动杆4靠近装置本 体1的一端,另一端铰接在相邻转动杆4的第二套管42上。
[0070]
所述第四连杆47的一端铰接在其中一个转杆杆4的第二套管 42上,另一端铰接在相邻转动杆4靠近装置本体1的一端,所述 第四连杆47和第三连杆46的中部通过第二铰接轴461铰接在一 起。
[0071]
当第一套管32沿着固定杆3向远离装置本体1的方向滑动 时,通过第一连杆35和第二连杆36带动与固定杆3相邻的转动 杆4上的第二套管42沿着转动杆4向远离装置本体1的方向滑动, 使第三连杆46和第四连杆47之间的夹角减小,相邻的两个转动 杆4相互靠
拢,对应的两个第二探测雷达45也相互靠拢,提高探 测精度;当第一套管32沿着固定杆3向靠近装置本体1的方向滑 动时,通过第一连杆35和第二连杆36带动与固定杆3相邻的转 动杆4上的第二套管42也沿着转动杆4向靠近装置本体1的方向 滑动,使第三连杆46和第四连杆47之间的夹角增大,相邻的两 个转动杆4相互远离,对应的两个第二探测雷达45也相互远离, 使若干个第二探测雷达45围绕在装置本体1的四周,增加探测范 围。
[0072]
具体来说,所述装置本体1的上侧面同轴转动设置有圆管2, 所述圆管2的上端设有顶板21,所述圆管2内设有第二驱动结构, 所述第二驱动结构能够带动装置本体1转动。
[0073]
当需要集中探测指定方向时,启动第一驱动结构,使第一套 管32沿着固定杆3向远离装置本体1的方向滑动,使转动杆4 逐渐靠近固定杆3,若干个第二探测雷达45相互靠拢第一探测雷 达34,然后启动第二驱动结构,带动装置本体1绕着圆管2转动, 使第一探测雷达34正对指定的探测方向,省去了改变无人船5 航行方向的麻烦,提高探测效率。
[0074]
具体来说,所述第二驱动结构包括齿圈22和第一电机23.
[0075]
所述齿圈22同轴固设在圆管2的内侧壁上。
[0076]
所述第一电机23通过底座固设在圆管2的内侧壁上,所述第 一电机23的输出轴上固设有第一齿轮231,所述第一齿轮231和 齿圈22啮合连接。
[0077]
启动第一电机23,带动第一齿轮231转动,通过齿圈22带 动装置本体1转动,使固定杆3上的第一探测雷达34正对指定方 向,快速改变探测方向,结构简单。
[0078]
具体来说,所述安装腔11内对称设有两个连接柱14,所述 连接柱14的两端分别与安装腔11的上下侧面固连。
[0079]
连接柱14的设置能够避免位于安装腔11上下侧的装置本体 1发生断裂,提高装置本体1的稳定性,安全可靠。
[0080]
具体来说,所述装置本体1的底部设有若干个穿孔16,若干 个所述穿孔16均与安装腔11的底部相连通。
[0081]
由于装置本体1设置在无人船5的底部,当无人船5航行时, 水流沿着弧形通孔13进入到安装腔11内,然后通过穿孔16流出 至外界,减小无人船5航行的阻力。
[0082]
在本专利的描述中,需要理解的是,术语“上”、“下”、“内”、
ꢀ“
外”等指示的方位或位置关系为基于附图所示的方位或位置关 系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所 指的装置或元件必须具有特定的方位、以特定的方位构造和操作, 因此不能理解为对本专利的限制。
[0083]
本文中所描述的具体实施例仅仅是对本发明精神作举例说 明。本发明所属技术领域的技术人员可以对所描述的具体实施例 做各种各样的修改或补充或采用类似的方式替代,但并不会偏离 本发明的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1