一种多自由曲面反射镜测量数据的评价计算方法与流程
[0001]
本发明涉及一种反射镜测量数据的评价计算方法。
背景技术:
[0002]
多自由曲面反射系统指由一个以上反射镜表面共同完成其设计功能效果的系统,系统功能由这些表面的质量以及各个表面之间的相对位置关系共同决定。各表面间可能相互关联存在共同的定位基准,也可能互相独立于空间之中。多反射镜光学系统的一体制造极大程度的降低了多个表面装配组装的难度,进一步推进了自由曲面的广泛应用。高精度的完整测量与评价是多反射光学系统制造的基础保障,如今成熟的测量技术能够完成对单个表面的高精度测量,在曲面的实际评价过程中,测量曲面往往只相当于整个设计曲面上的一部分,并且测量曲面在设计曲面上的具体对应区域是未知的,需要确定测量曲面在设计曲面上的对应区域,通常要求具有较好的初值位置及几何约束,才能完成测量曲面和与之对应的设计曲面之间的匹配实现面形误差评价。而多自由曲面反射系统测量除了面形评价外还需要各表面相对位置误差的评价方法。
[0003]
目前多自由曲面反射系统的评价方法往往需要添加额外的空间位置基准,或者使用表面本身的棱边、顶点、几何中心等几何特征作为相对位置定位基准,但这些做法与多自由曲面反射系统的设计理念相悖,同时实际测量过程中大多测量方法表面的测量范围有限难以完全包含测量表面的几何特征,鲜有能够完成多自由曲面反射系统相对位置测量的设备,并且大部分设备只能完成单一类型的多自由曲面反射系统的测量评价,缺少通用性。当下仍然缺少一种多自由曲面反射系统测量数据的位置误差与面形误差评价方法,能够不依赖特定测量仪器或测量系统,较为准确的完成多自由曲面反射系统的测量评价。
技术实现要素:
[0004]
针对上述问题,本发明的目的是提供一种多表面面形测量数据的评价算法,无需在被测系统内添加额外的空间位置参考基准,无需计算表面的棱边、顶点、几何中心等几何特征,完成各表面面形误差与相对位置的评价。为实现上述目的,本发明采取以下的技术方案。
[0005]
一种多自由曲面反射镜测量数据的评价计算方法,包括下列步骤:
[0006]
(1)使用多表面测量数据中所有表面的测量数据与多自由曲面反射系统的设计模型进行坐标配准,完成测量坐标系与模型坐标系的统一:用于坐标配准过程的刚体变换齐次矩阵h通过绕过点(x
l
,y
l
,z
l
),单位矢量方向为[e
x
,e
y
,e
z
]
t
的空间直线l与沿空间笛卡尔坐标系的x轴,y轴和z轴的平移量a,b和c表示,表达方式为:
[0007]
[0008]
其中,θ是绕单位矢量[e
x
,e
y
,e
z
]
t
旋转的角度;
[0009][0010]
设测量中,第j个表面的第i个测量数据点的坐标为p(i,j),则其空间坐标如下表示:
[0011]
p(i,j)=(x(i,j),y(i,j),z(i,j))
[0012]
设p(i,j)经过刚体变换后对应的模型点为q(i,j),此对应的模型点根据点距最近原则搜索得到;坐标配准过程优化求解刚体变换齐次矩阵h,使得测量数据到模型对应点的几何距离最小化,优化目标函数如下所示:
[0013][0014]
(2)使用经过坐标配准后的各表面测量数据分别与各自面型的设计模型方程进行坐标配准,完成各表面面形与位置误差的评价。方法如下:
[0015]
设第j个表面经过第一步坐标配准后的测量数据点为t(i,j),则该面测量数据与其理想模型坐标配准的变换关系按照以下方式进计算:
[0016][0017]
其中,r
j
和t
j
分别为第j个表面测量数据坐标配准到其表面设计模型上的刚体变换旋转矩阵和平移矢量;d[
·
]为距离算子,表示测量数据点t(i,j)经过刚体变换旋转矩阵和平移矢量的计算后与其理想表面的距离;此处r
j
和t
j
的表达式为:
[0018][0019]
t
j
=[δx
j
,δy
j
,δz
j
]
t
[0020]
坐标配准后的测量数据记为t
reg
(i,j),该数据坐标通过以下变换得到:
[0021]
t
reg
(i,j)=r
j
t(i,j)+t
j
=(x
reg
(i,j),y
reg
(i,j),z
reg
(i,j))
t
[0022]
其中x
reg
,y
reg
和z
reg
是坐标配准后的测量数据的笛卡尔坐标;
[0023]
此时,将各表面测量数据坐标配准后各数据点到自由曲面反射镜模型的距离作为面形误差,设第j个自由曲面反射镜的面形方程为z=f
j
(x,y),则各测量数据点对应的面形误差e(i,j)为:
[0024]
e(i,j)=z
reg
(i,j)-f
j
(x
reg
(i,j),y
reg
(i,j))
[0025]
第j个自由曲面反射镜位置误差定义为其与模型面型间的位移偏差量t
j
和绕模型坐标系中某一矢量方向v
j
的偏差角度θ
j
;其中t
j
与平移矩阵t
j
一致,即δx
j
,δy
j
和δz
j
分别为第j个自由曲面反射镜沿着沿空间笛卡尔坐标系的x轴,y轴和z轴方向的位移偏差量;v
j
与θ
j
通过对旋转矩阵r
j
使用下述公式计算得到:
[0026]
[0027]
附图说明
[0028]
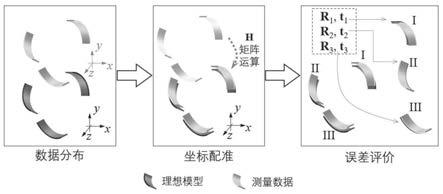
图1为本发明所涉及的多自由曲面反射系统测量数据误差评价方法流程图。
[0029]
图2为本发明实施例中离轴二反自由曲面系统的面形与位置误差分析过程。其中,(a)是两个反射面表面测量数据与两反设计模型数据初步配准结果;(b)是精细坐标配准结果;(c)是自由曲面反射面一面测量数据与其设计模型的匹配结果;(d)自由曲面反射面二面测量数据与其设计模型的匹配结果。
[0030]
图3本发明实施例中离轴二反自由曲面系统两个表面测量数据的面形误差。其中(a)是第一个自由曲面反射面面形误差;(b)是第二个自由曲面反射面面形误差。
具体实施方式
[0031]
结合附图和实施例对本发明的一种多表面面形测量数据的评价计算方法加以说明。评价计算方法流程如图1所示。首先,使用多表面测量数据中所有表面的测量数据与多自由曲面反射系统的设计模型进行坐标配准,完成测量坐标系与模型坐标系的统一,然后,将坐标系统一后的各表面测量数据与各表面的设计模型进行单独的坐标配准,最后,根据坐标配准结果获得被测表面面形与位置误差评价结果。
[0032]
(1)将多表面测量数据中所有表面的测量数据与多自由曲面反射系统的模型进行匹配,完成测量坐标系与模型坐标系的统一。其中,用于坐标配准过程的刚体变换齐次矩阵h通过绕过点(x
l
,y
l
,z
l
),单位矢量方向为[e
x
,e
y
,e
z
]
t
的空间直线l与沿空间笛卡尔坐标系的x轴,y轴和z轴的平移量a,b和c表示,表达方式为:
[0033][0034]
其中:
[0035][0036]
具体的,对于刚体变换齐次矩阵h的计算包括以下步骤:
[0037]
第一步,进行初步坐标配准计算。设第j个反射镜的第i个测量数据点的坐标为p(i,j),则其空间坐标表示为:
[0038]
p(i,j)=(x(i,j),y(i,j),z(i,j))
[0039]
多自由曲面反射镜的第j个反射镜的第i个模型数据点的坐标为q(i,j),并且该处的法矢为n
q
(i,j),根据自由曲面反射镜模型的方程计算得到。经过配准变换后的p(i,j)与q(i,j)根据点距最近原则确定为匹配点对。其优化函数的目标为:
[0040]
[0041]
其中h
rough
为测量数据转化的刚体变换齐次矩阵。此时,对于测量数据点p(i,j),经过平移旋转后所获得的第j个反射镜的第i个数据点的坐标p
r
(i,j)的表达式为
[0042]
p
r
(i,j)=h
rough
p(i,j)
[0043]
第二步,基于初步坐标配准计算结果进行精细坐标配准计算。根据多自由曲面反射镜模型的基准方程,计算测量数据点沿法矢方向到自由曲面反射镜的空间距离,设d[
·
]为距离计算算子,表示测量数据点与其理想表面的距离。则通过以下目标函数优化计算两坐标系间的刚体变换齐次矩阵,进一步提升多表面测量数据与设计模型间的匹配精度。
[0044][0045]
其中h
fine
为精细坐标配准过程中测量坐标系与模型坐标系统一的刚体变换齐次矩阵。经过测量坐标系与模型坐标系统一后,所获得的第j个反射镜的第i个数据点的坐标t(i,j)是与模型坐标系统一的测量数据,其表达式为:
[0046]
t(i,j)=h
fine
p
r
(i,j)
[0047]
(2)将每个表面的测量数据分别与其表面的设计模型进行匹配,设第j个表面经过测量坐标系与模型坐标系统一后的测量数据点为t(i,j),则该测量数据点与其理想模型匹配的变换关系按照以下方式进计算:
[0048][0049]
其中,r
j
和t
j
分别为第j个表面测量数据坐标配准到其表面设计模型上的刚体变换旋转矩阵和平移矢量。此处r
j
和t
j
的计算方式为:
[0050][0051]
t
j
=[δx
j
,δy
j
,δz
j
]
t
[0052]
坐标配准后的测量数据t
reg
(i,m)坐标通过变换得到:
[0053]
t
reg
(i,j)=r
j
t(i,j)+t
j
=(x
reg
(i,j),y
reg
(i,j),z
reg
(i,j))
t
[0054]
此时,将各表面测量数据坐标配准后各数据点到自由曲面反射镜模型的距离作为面形误差,设第j个自由曲面反射镜的面形方程为z=f
j
(x,y),则各测量数据点对应的面形误差e(i,j)为:
[0055]
e(i,j)=z
reg
(i,j)-f
j
(x
reg
(i,j),y
reg
(i,j))
[0056]
第j个自由曲面反射镜位置误差定义为其与模型面型间的位移偏差量t
j
和绕模型坐标系中某一矢量方向v
j
的偏差角度θ
j
。其中t
j
与平移矩阵t
j
一致,即δx
j
,δy
j
和δz
j
分别为第j个自由曲面反射镜沿着沿空间笛卡尔坐标系的x轴,y轴和z轴方向的位移偏差量。v
j
与θ
j
通过对旋转矩阵r
j
使用下述公式计算得到:
[0057][0058][0059]
根据上述的方式可以获得表面的面形误差评价结果为e(i,j);表面的位置误差的
评价结果为:第j个自由曲面反射镜沿着笛卡尔坐标系的各个轴的位置平移误差为δx
j
,δy
j
,δz
j
,旋转误差为绕着矢量方向v
j
的轴旋转,旋转角度为θ
j
。
[0060]
根据上述方法和流程,可实现多自由曲面反射系统各表面面形与位置误差的准确评估。
[0061]
表1两自由曲面反射面的最大误差评价结果数据
[0062][0063]
本发明方法可适用于各类光学多自由曲面反射系统的综合误差评估,下面以一离轴二反自由曲面系统为例,其系统结构如图2所示,以进一步具体描述本发明的评价方法。其系统中的两个自由曲面反射面均为自由曲面,系统材质为铝,通过相关测量设备获得两个自由曲面反射面测量数据。使用本发明的评价流程,对离轴系统进行统误差分析过程如图2所示。首先将两反射面表面测量数据与两反设计模型数据进行初始配准其结果如图2(a)所示,对测量数据进行刚体变换后,进行精细坐标配准操作,其结果如图2(b)所示,完成测量坐标系与模型坐标系的统一。随后将两表面的测量数据与各表面的设计模型进行配准,其结果如图2(c)、(d)所示,分析两表面面形与位置误差。面形误差如图3所示,各表面最大位置误差的评价结果如表1所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1