一种用以汽车线束检测的多功能智能检测平台的制作方法
[0001]
本发明涉及线束检测设备技术领域,具体是涉及一种用以汽车线束检测的多功能智能检测平台。
背景技术:
[0002]
线束为一定负载源组提供服务设备的总体,如中继线路、交换装置、控制系统等。话务理论的基本研究内容是研究话务量、呼损和线束容量三者之间的关系,因此.线束是话务理论中一个重要的基本概念;
[0003]
负载源是线束的服务对象,通常是指用户设备;广义地说,上一级设备就是下一级设备的负载源。在电话通信中,负载源也称为话源,线束中所含服务设备数,称为线束容量,图1是线束的示意图。该线束的容量为v,它为n个负载源提供服务。任何一个发出呼叫的负载源,可以占用线束中的一个空闲服务设备。
[0004]
汽车线路常见的故障有:插接件接触不良、导线之间的短路、断路、搭铁等。
[0005]
产生原因有以下几个方面:
[0006]
1)自然损坏;
[0007]
2)由于电气设备的故障造成电线束的损坏;
[0008]
3)人为故障。
[0009]
由于汽车线束的的特殊性需要保证其合格率达到标准,所以需要提出一种用以汽车线束检测的多功能智能检测平台,可以对线束的进行拉脱力测试,辅助外皮切割和测试品快速卸料。
技术实现要素:
[0010]
为解决上述技术问题,提供一种用以汽车线束检测的多功能智能检测平台,本技术方案可以对线束的进行拉脱力测试,辅助外皮切割和测试品快速卸料。
[0011]
为达到以上目的,本发明采用的技术方案为:
[0012]
一种用以汽车线束检测的多功能智能检测平台,包括:
[0013]
工作台;
[0014]
夹紧组件,夹紧组件用于对线束进行夹紧;
[0015]
直线驱动器和拉力机,直线驱动器和拉力机分别设置于工作台顶部的两端,夹紧组件有两个,两个夹紧组件分别设置于直线驱动器和拉力机的输出端;
[0016]
皮质切割机构和剥离驱动机构,剥离驱动机构设置于工作台的顶部,皮质切割机构设置于剥离驱动机构输出端;
[0017]
废料抽取机构,工作台上设有开口,开口位于直线驱动器和拉力机之间,废料抽取机构设置于工作台的底部,废料抽取机构工作状态时其输出端由工作台开口处上升并将线束夹紧。
[0018]
优选的,夹紧组件包括:
[0019]
连通环,连通环的一侧设置有开口;
[0020]
内弧板和扭动把手,扭动把手贯穿连通环并与其螺纹连接,并且扭动把手的输出端朝向连通环的开口,内弧板设置于扭动把手的输出端并与其可转动连接;
[0021]
连接架,设置于连通环的外部并与其固定连接。
[0022]
优选的,直线驱动器包括:
[0023]
第一固定架和第二固定架,第一固定架和第二固定架均设置于工作台的顶部;
[0024]
第一螺纹杆,第一螺纹杆的两端分别与第一固定架和第二固定架固定连接;
[0025]
导向杆,导向杆的两端分别与第一固定架和第二固定架固定连接;
[0026]
活动快,活动快分别套设与第一螺纹杆和导向杆上,活动快与第一螺纹杆螺纹连接,活动快和导向杆滑动连接;
[0027]
第一伺服电机,设置于第一固定架上,并且第一伺服电机的输出端与第一螺纹杆的受力端连接。
[0028]
优选的,皮质切割机构包括:
[0029]
直角板,设置于剥离驱动机构的输出端;
[0030]
第一气缸,设置于直角板上;
[0031]
推板,设置于第一气缸的输出端,推板上设置有第一限位杆,第一限位杆贯穿直角板并与其滑动连接;
[0032]
宽阔手指气缸,设置于推板上;
[0033]
第一夹板和第二夹板,第一夹板和第二夹板分别设置与宽阔手指气缸的两个输出端。
[0034]
优选的,第一夹板包括:
[0035]
连接件;
[0036]
半环板,半环板的外缘与连接件固定连接,半环板通过连接件固定连接与宽阔手指气缸的输出端;
[0037]
纵刀,纵刀对称排列设置于半环板的内缘;
[0038]
横刀,设置于半环板内缘的中部。
[0039]
优选的,剥离驱动机构包括:
[0040]
第一立板和第二立板,第一立板和第二立板均设置于工作台的顶部;
[0041]
第二螺纹杆,第二螺纹杆的两端分别与第一立板和第二立板可转动连接;
[0042]
滑动块,设置于工作台的顶部并与其滑动连接,并且滑动块与第二螺纹杆螺纹连接,皮质切割机构的非工作部设置于滑动块上;
[0043]
第二伺服电机,设置于第一立板上,并且第二伺服电机的输出端与第二螺纹杆的受力端连接。
[0044]
优选的,废料抽取机构包括:
[0045]
翻转组件,设置于工作台的底部;
[0046]
纵向驱动组件,设置于翻转组件的输出端;
[0047]
废料夹爪,设置于纵向驱动组件的输出端。
[0048]
优选的,翻转组件包括:
[0049]
第二气缸,第二气缸的固定端与工作台的底部铰接;
[0050]
转动架,设置于工作台的底部;
[0051]
连动板,连动板的中段与转动架可转动连接,连动板的受力端与第二气缸铰接,连动板的输出端与纵向驱动组件的非工作部固定连接。
[0052]
优选的,纵向驱动组件包括:
[0053]
固定板,固定板与翻转组件的输出端固定连接;
[0054]
第三气缸,设置于固定板的底部并与其固定连接;
[0055]
纵移板,设置于第三气缸的输出端,废料夹爪设置于纵移板的顶部,废料夹爪设置于纵移板的顶部;
[0056]
第二限位杆,设置于纵移板的底部,并且第二限位杆贯穿固定板并与其滑动连接。
[0057]
优选的,废料夹爪包括:
[0058]
爪架,设置于纵向驱动组件的输出端;
[0059]
第一爪杆和第二爪杆,第一爪杆和第二爪杆对称设置于爪架的两侧并与其铰接;
[0060]
连动头,第一爪杆和第二爪杆的受力端通过连动头连接;
[0061]
第四气缸,设置于爪架上,并且第四气缸的输出端与连动头连接。
[0062]
本发明与现有技术相比具有的有益效果是:由于两个夹紧组件分别设置于直线驱动器和拉力机的输出端,为了便于区分在此通过第一夹紧组件和第二夹紧组件进行描述,首先工作人员将线束的尾端放置于第一夹紧组件的输出端,然后工作人员通过操作第一夹紧组件将线束的尾端夹紧,然后工作人员手持线束的中部,皮质切割机构开始工作,皮质切割机构的输出端合拢夹紧线束的首端并插入其外皮内,剥离驱动机构开始工作,剥离驱动机构的输出端带动皮质切割机构远离直线驱动器,皮质切割机构在移动的过程中将线束的外皮剥落下来,线束首端的端导体漏出,此时皮质切割机构和剥离驱动机构复位,工作人员将线束的首端插入进第二夹紧组件的输出端,然后工作人员通过操作第二夹紧组件将线束漏出的导体处夹紧,此时直线驱动器开始工作,直线驱动器的输出端通过第一夹紧组件拉动线束的尾端,工作人员通过观察线束外皮与导体分离时拉力机所显示的数值,通过拉力机的数值已确定线束外皮和导体压接后的拉脱力,最后废料抽取机构开始工作,废料抽取机构的输出端由工作台的开口处向上伸出并将线束夹紧,然后废料抽取机构的输出端带动线束由工作台的开口处移动至工作台的底部并将其松开并抛落;
[0063]
1、通过夹紧组件、直线驱动器和拉力机的设置,可以对线束外皮和导体进行拉脱力测试;
[0064]
2、通过本设备的设置,可以对线束的进行拉脱力测试,辅助外皮切割和测试品快速卸料。
附图说明
[0065]
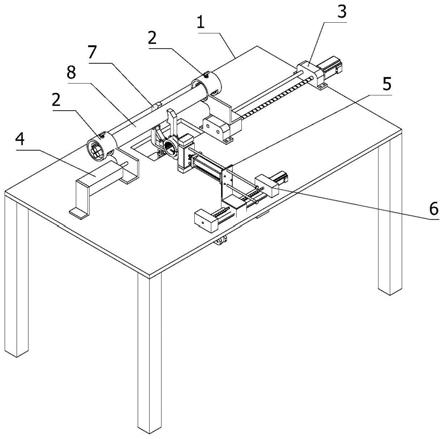
图1为本发明的立体结构示意图一;
[0066]
图2为本发明的夹紧组件的立体结构示意图;
[0067]
图3为本发明的夹紧组件的主视图;
[0068]
图4为本发明的直线驱动器的立体结构示意图;
[0069]
图5为本发明的皮质切割机构的立体结构示意图;
[0070]
图6为本发明的第一夹板的立体结构示意图;
[0071]
图7为本发明的立体结构示意图二;
[0072]
图8为本发明的图7的a处放大图;
[0073]
图9为本发明的侧视图;
[0074]
图10为本发明的废料夹爪的主视图。
[0075]
图中标号为:
[0076]
1-工作台;
[0077]
2-夹紧组件;2a-连通环;2b-内弧板;2c-扭动把手;2d-连接架;
[0078]
3-直线驱动器;3a-第一固定架;3b-第二固定架;3c-第一螺纹杆;3d-导向杆;3e-活动快;3f-第一伺服电机;
[0079]
4-拉力机;
[0080]
5-皮质切割机构;5a-直角板;5b-第一气缸;5c-推板;5c1-第一限位杆;5d-宽阔手指气缸;5e-第一夹板;5e1-连接件;5e2-半环板;5e3-纵刀;5e4-横刀;5f-第二夹板;
[0081]
6-剥离驱动机构;6a-第一立板;6b-第二立板;6c-第二螺纹杆;6d-滑动块;6e-第二伺服电机;
[0082]
7-废料抽取机构;7a-翻转组件;7a1-第二气缸;7a2-转动架;7a3-连动板;7b-纵向驱动组件;7b1-固定板;7b2-第三气缸;7b3-纵移板;7b4-第二限位杆;7c-废料夹爪;7c1-爪架;7c2-第一爪杆;7c3-第二爪杆;7c4-连动头;7c5-第四气缸;
[0083]
8-线束。
具体实施方式
[0084]
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
[0085]
参照图1所示,一种用以汽车线束检测的多功能智能检测平台,包括:
[0086]
工作台1;
[0087]
夹紧组件2,夹紧组件2用于对线束进行夹紧;
[0088]
直线驱动器3和拉力机4,直线驱动器3和拉力机4分别设置于工作台1顶部的两端,夹紧组件2有两个,两个夹紧组件2分别设置于直线驱动器3和拉力机4的输出端;
[0089]
皮质切割机构5和剥离驱动机构6,剥离驱动机构6设置于工作台1的顶部,皮质切割机构5设置于剥离驱动机构6输出端;
[0090]
废料抽取机构7,工作台1上设有开口,开口位于直线驱动器3和拉力机4之间,废料抽取机构7设置于工作台1的底部,废料抽取机构7工作状态时其输出端由工作台1开口处上升并将线束夹紧;
[0091]
由于两个夹紧组件2分别设置于直线驱动器3和拉力机4的输出端,为了便于区分在此通过第一夹紧组件2和第二夹紧组件2进行描述,首先工作人员将线束的尾端放置于第一夹紧组件2的输出端,然后工作人员通过操作第一夹紧组件2将线束的尾端夹紧,然后工作人员手持线束的中部,皮质切割机构5开始工作,皮质切割机构5的输出端合拢夹紧线束的首端并插入其外皮内,剥离驱动机构6开始工作,剥离驱动机构6的输出端带动皮质切割机构5远离直线驱动器3,皮质切割机构5在移动的过程中将线束的外皮剥落下来,线束首端的端导体漏出,此时皮质切割机构5和剥离驱动机构6复位,工作人员将线束的首端插入进
第二夹紧组件2的输出端,然后工作人员通过操作第二夹紧组件2将线束漏出的导体处夹紧,此时直线驱动器3开始工作,直线驱动器3的输出端通过第一夹紧组件2拉动线束的尾端,工作人员通过观察线束外皮与导体分离时拉力机4所显示的数值,通过拉力机4的数值已确定线束外皮和导体压接后的拉脱力,最后废料抽取机构7开始工作,废料抽取机构7的输出端由工作台1的开口处向上伸出并将线束夹紧,然后废料抽取机构7的输出端带动线束由工作台1的开口处移动至工作台1的底部并将其松开并抛落。
[0092]
如图2和图3所示夹紧组件2包括:
[0093]
连通环2a,连通环2a的一侧设置有开口;
[0094]
内弧板2b和扭动把手2c,扭动把手2c贯穿连通环2a并与其螺纹连接,并且扭动把手2c的输出端朝向连通环2a的开口,内弧板2b设置于扭动把手2c的输出端并与其可转动连接;
[0095]
连接架2d,设置于连通环2a的外部并与其固定连接;
[0096]
工作人员将线束的端部穿过连通环2a,然后工作人员扭动扭动把手2c,扭动把手2c的输出端推动内弧板2b向连通环2a的开口处移动,通过内弧板2b将线束端部压紧与连通环2a中,通过连通环2a内缘的限制使得内弧板2b不可转动,通过连通环2a的开口设置使得需要固定直径较小的线束时,内弧板2b内缘中部也可以将其固定,内弧板2b两端的部分可以穿过开口以配合,连接架2d用于连通环2a与其他机构的连接。
[0097]
如图4所示其特征在于,直线驱动器3包括:
[0098]
第一固定架3a和第二固定架3b,第一固定架3a和第二固定架3b均设置于工作台1的顶部;
[0099]
第一螺纹杆3c,第一螺纹杆3c的两端分别与第一固定架3a和第二固定架3b固定连接;
[0100]
导向杆3d,导向杆3d的两端分别与第一固定架3a和第二固定架3b固定连接;
[0101]
活动快3e,活动快3e分别套设与第一螺纹杆3c和导向杆3d上,活动快3e与第一螺纹杆3c螺纹连接,活动快3e和导向杆3d滑动连接;
[0102]
第一伺服电机3f,设置于第一固定架3a上,并且第一伺服电机3f的输出端与第一螺纹杆3c的受力端连接;
[0103]
直线驱动器3开始工作,第一伺服电机3f的输出端带动第一螺纹杆3c转动,第一螺纹杆3c带动活动快3e沿导向杆3d进行移动,导向杆3d带动第一夹紧组件2对线束进行后拉,第一固定架3a和第二固定架3b用于固定和支撑。
[0104]
如图5所示皮质切割机构5包括:
[0105]
直角板5a,设置于剥离驱动机构6的输出端;
[0106]
第一气缸5b,设置于直角板5a上;
[0107]
推板5c,设置于第一气缸5b的输出端,推板5c上设置有第一限位杆5c1,第一限位杆5c1贯穿直角板5a并与其滑动连接;
[0108]
宽阔手指气缸5d,设置于推板5c上;
[0109]
第一夹板5e和第二夹板5f,第一夹板5e和第二夹板5f分别设置与宽阔手指气缸5d的两个输出端;
[0110]
皮质切割机构5开始工作,第一气缸5b的输出端通过推板5c推动宽阔手指气缸5d
靠近线束,宽阔手指气缸5d开始工作,宽阔手指气缸5d的两个输出端带动第一夹板5e和第二夹板5f互相靠近将线束夹紧,直角板5a用于固定支撑,第一限位杆5c1用于对推板5c的移动方向进行引导。
[0111]
如图6所示第一夹板5e包括:
[0112]
连接件5e1;
[0113]
半环板5e2,半环板5e2的外缘与连接件5e1固定连接,半环板5e2通过连接件5e1固定连接与宽阔手指气缸5d的输出端;
[0114]
纵刀5e3,纵刀5e3对称排列设置于半环板5e2的内缘;
[0115]
横刀5e4,设置于半环板5e2内缘的中部。
[0116]
宽阔手指气缸5d的两个输出端分别带动第一夹板5e和第二夹板5f互相靠近,通过半环板5e2内缘的纵刀5e3将线束的外皮割裂,通过横刀5e4将线束的外皮切断,当剥离驱动机构6带动第一夹板5e和第二夹板5f随其移动的过程中将线束的外皮剥离,连接件5e1用于固定支撑。
[0117]
如图8所示剥离驱动机构6包括:
[0118]
第一立板6a和第二立板6b,第一立板6a和第二立板6b均设置于工作台1的顶部;
[0119]
第二螺纹杆6c,第二螺纹杆6c的两端分别与第一立板6a和第二立板6b可转动连接;
[0120]
滑动块6d,设置于工作台1的顶部并与其滑动连接,并且滑动块6d与第二螺纹杆6c螺纹连接,皮质切割机构5的非工作部设置于滑动块6d上;
[0121]
第二伺服电机6e,设置于第一立板6a上,并且第二伺服电机6e的输出端与第二螺纹杆6c的受力端连接;
[0122]
剥离驱动机构6开始工作,第二伺服电机6e的输出端带动第二螺纹杆6c转动,第二螺纹杆6c通过滑动块6d带动皮质切割机构5远离直线驱动器3,第一立板6a和第二立板6b用于固定支撑。
[0123]
如图7所示废料抽取机构7包括:
[0124]
翻转组件7a,设置于工作台1的底部;
[0125]
纵向驱动组件7b,设置于翻转组件7a的输出端;
[0126]
废料夹爪7c,设置于纵向驱动组件7b的输出端;
[0127]
废料抽取机构7开始工作,翻转组件7a的输出端带动纵向驱动组件7b转动,直至纵向驱动组件7b的输出端朝向工作台1的开口处,纵向驱动组件7b开始工作,纵向驱动组件7b的输出端带动废料夹爪7c进行上升,直至废料夹爪7c穿过工作台1的开口处,此时线束的中端位于废料夹爪7c的输出端,然后废料夹爪7c开始工作,废料夹爪7c的输出端将线束的中端夹紧,纵向驱动组件7b再次工作,纵向驱动组件7b的输出端通过废料夹爪7c带动线束下降至工作台1的底部,翻转组件7a再次工作,使得废料夹爪7c的输出端朝下,废料夹爪7c的输出端松开对线束的固定,线束被抛落。
[0128]
如图9所示翻转组件7a包括:
[0129]
第二气缸7a1,第二气缸7a1的固定端与工作台1的底部铰接;
[0130]
转动架7a2,设置于工作台1的底部;
[0131]
连动板7a3,连动板7a3的中段与转动架7a2可转动连接,连动板7a3的受力端与第
二气缸7a1铰接,连动板7a3的输出端与纵向驱动组件7b的非工作部固定连接;
[0132]
翻转组件7a,第二气缸7a1的输出端推动或者拉动连动板7a3受力端,通过连动板7a3的输出端带动纵向驱动组件7b向上翻转或者向下翻转,转动架7a2用于固定支撑。
[0133]
如图9所示纵向驱动组件7b包括:
[0134]
固定板7b1,固定板7b1与翻转组件7a的输出端固定连接;
[0135]
第三气缸7b2,设置于固定板7b1的底部并与其固定连接;
[0136]
纵移板7b3,设置于第三气缸7b2的输出端,废料夹爪7c设置于纵移板7b3的顶部,废料夹爪7c设置于纵移板7b3的顶部;
[0137]
第二限位杆7b4,设置于纵移板7b3的底部,并且第二限位杆7b4贯穿固定板7b1并与其滑动连接;
[0138]
纵向驱动组件7b开始工作,第三气缸7b2的输出端推动或者拉动纵移板7b3进行上升或者下降,纵移板7b3带动废料夹爪7c进行上升或者下降,固定板7b1用于固定支撑,第二限位杆7b4用于对纵移板7b3的移动方向进行引导。
[0139]
如图10所示废料夹爪7c包括:
[0140]
爪架7c1,设置于纵向驱动组件7b的输出端;
[0141]
第一爪杆7c2和第二爪杆7c3,第一爪杆7c2和第二爪杆7c3对称设置于爪架7c1的两侧并与其铰接;
[0142]
连动头7c4,第一爪杆7c2和第二爪杆7c3的受力端通过连动头7c4连接;
[0143]
第四气缸7c5,设置于爪架7c1上,并且第四气缸7c5的输出端与连动头7c4连接;
[0144]
废料夹爪7c开始工作,第四气缸7c5的输出端回收并拉动连动头7c4,通过连动头7c4带动第一爪杆7c2和第二爪杆7c3的输出端互相靠近将线束夹紧。
[0145]
本发明的工作原理:由于两个夹紧组件2分别设置于直线驱动器3和拉力机4的输出端,为了便于区分在此通过第一夹紧组件2和第二夹紧组件2进行描述,首先工作人员将线束的尾端穿过于第一夹紧组件2的连通环2a,然后工作人员扭动扭动把手2c,扭动把手2c的输出端推动内弧板2b向连通环2a的开口处移动,通过内弧板2b将线束端部压紧与连通环2a中,然后工作人员手持线束的中部,皮质切割机构5开始工作,第一气缸5b的输出端通过推板5c推动宽阔手指气缸5d靠近线束,宽阔手指气缸5d开始工作,宽阔手指气缸5d的两个输出端分别带动第一夹板5e和第二夹板5f互相靠近,通过半环板5e2内缘的纵刀5e3将线束的外皮割裂,通过横刀5e4将线束的外皮切断,剥离驱动机构6开始工作,剥离驱动机构6的输出端带动皮质切割机构5远离直线驱动器3,当剥离驱动机构6带动第一夹板5e和第二夹板5f随其移动的过程中将线束的外皮剥离,线束首端的端导体漏出,此时皮质切割机构5和剥离驱动机构6复位,工作人员将线束的首端插入进第二夹紧组件2的输出端,然后工作人员通过操作第二夹紧组件2将线束漏出的导体处夹紧,此时直线驱动器3开始工作,第一伺服电机3f的输出端带动第一螺纹杆3c转动,第一螺纹杆3c带动活动快3e沿导向杆3d进行移动,导向杆3d带动第一夹紧组件2对线束进行后拉,工作人员通过观察线束外皮与导体分离时拉力机4所显示的数值,通过拉力机4的数值已确定线束外皮和导体压接后的拉脱力,最后废料抽取机构7开始工作,翻转组件7a的输出端带动纵向驱动组件7b转动,直至纵向驱动组件7b的输出端朝向工作台1的开口处,纵向驱动组件7b开始工作,纵向驱动组件7b的输出端带动废料夹爪7c进行上升,直至废料夹爪7c穿过工作台1的开口处,此时线束的中端位于
废料夹爪7c的输出端,然后废料夹爪7c开始工作,废料夹爪7c的输出端将线束的中端夹紧,纵向驱动组件7b再次工作,纵向驱动组件7b的输出端通过废料夹爪7c带动线束下降至工作台1的底部,翻转组件7a再次工作,使得废料夹爪7c的输出端朝下,废料夹爪7c的输出端松开对线束的固定,线束被抛落。
[0146]
本装置通过以下步骤实现本发明的功能,进而解决了本发明提出的技术问题:
[0147]
步骤一、工作人员将线束的尾端放置于第一夹紧组件2的输出端,然后工作人员通过操作第一夹紧组件2将线束的尾端夹紧;
[0148]
步骤二、工作人员手持线束的中部,皮质切割机构5开始工作,皮质切割机构5的输出端合拢夹紧线束的首端并插入其外皮内;
[0149]
步骤三、剥离驱动机构6开始工作,剥离驱动机构6的输出端带动皮质切割机构5远离直线驱动器3,皮质切割机构5在移动的过程中将线束的外皮剥落下来;
[0150]
步骤四、工作人员将线束的首端插入进第二夹紧组件2的输出端,然后工作人员通过操作第二夹紧组件2将线束漏出的导体处夹紧;
[0151]
步骤五、此时直线驱动器3开始工作,直线驱动器3的输出端通过第一夹紧组件2拉动线束的尾端;
[0152]
步骤六、工作人员通过观察线束外皮与导体分离时拉力机4所显示的数值,通过拉力机4的数值已确定线束外皮和导体压接后的拉脱力;
[0153]
步骤七、废料抽取机构7开始工作,废料抽取机构7的输出端由工作台1的开口处向上伸出并将线束夹紧,然后废料抽取机构7的输出端带动线束由工作台1的开口处移动至工作台1的底部并将其松开并抛落。
[0154]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1