一种3D霍尔角度传感器的三点标定方法与流程
一种3d霍尔角度传感器的三点标定方法
技术领域
1.本发明涉及工业自动化产线中的传感器标定技术领域,特别是涉及一种3d霍尔角度传感器的三点标定方法。
背景技术:
2.随着工业自动化的不断发展,为了适应高测量精度,各类传感器被广泛应用于各种测量场合。传感器可以把各种物理被测量转化为电信号,从而被数据采集设备采集,经过运算后得出相应的物理量。磁场传感器,尤其是霍尔效应传感器能够在汽车和工业环境中进行角度或位置的准确检测,因而被广泛应用于工业和汽车电子领域,比如动力总成、车身系统以及安全保险应用等。在传感器的设计制造和使用过程中,传感器标定是必不可少的环节,通过标定试验,最终实现准确测量以及测量值的准确传递。
3.传感器的标定实际上就是依靠标准类型检测设备来确定被标定传感器自身的输入与输出之间的转换关系。目前技术领域内传感器标定主要依靠人工手动标定,由于安装传感器时方向难以确定,所以在传感器测量范围内输出值有可能存在不连续点,导致标定结果不准确,所以为了提高传感器标定的准确度以及传感器测量精度,以及适应工业自动化产线,需要一种新的传感器标定方法。
技术实现要素:
4.本发明所要解决的技术问题是提供一种3d霍尔角度传感器的三点标定方法,能够提高传感器标定的准确度以及传感器测量精度。
5.本发明解决其技术问题所采用的技术方案是:提供一种3d霍尔角度传感器的三点标定方法,包括以下步骤:
6.(1)将上位机分别与运动模块和传感器标定设备通信连接,所述传感器标定设备与待标定的3d霍尔角度传感器电连接;
7.(2)设置标定范围,并在行程起点、终点以及中间任一点读取3d霍尔角度传感器的输出值;
8.(3)确定输出值变化趋势,并根据输出值计算标定参数,把所述标定参数写入传感器。
9.所述步骤(1)中的运动模块为电机。
10.所述步骤(2)中行程起点和终点的确定方法为:通过所述上位机控制所述运动模块,读取3d霍尔角度传感器输出值,直到3d霍尔角度传感器的输出值有明显变化时将当前点作为行程起点,根据设置的标定范围确定行程终点。
11.所述步骤(3)中具体包括以下子步骤:
12.(31)计算角度范围消除3d霍尔角度传感器输出值中的折点;
13.(32)计算参考位置,利用参考位置将不连续点移至测量范围外最大距离;
14.(33)计算目标值,得到3d霍尔角度传感器在行程起点和终点的理论输出值;
15.(34)计算中间增益、增益指数和中间偏置;
16.(35)计算最终增益和最终偏置;
17.(36)将所述参考位置、增益指数、最终增益和最终偏置写入传感器完成标定。
18.所述步骤(31)具体为:判断三个输出值的大小关系,设三个输出值为out1、out2和out3,其中out1、out2分别为3d霍尔角度传感器在行程起点和终点的输出值,out3为3d霍尔角度传感器在中间点的输出值;当out1<out3<out2,角度范围angle_range=out2-out1;当out2<out3<out1,角度范围angle_range=out1-out2;当out3<out1<out2或者out1<out2<out3,角度范围angle_range=x-out2+out1;当out3<out2<out1或者out2<out1<out3,角度范围angle_range=x-out1+out2;x为3d霍尔角度传感器的输出值的最大值。
19.所述步骤(32)中通过其中,dac_zero表示参考位置,out1为3d霍尔角度传感器在行程起点的输出值,angle_range为角度范围,x为3d霍尔角度传感器的输出值的最大值;如果参考位置dac_zero大于2x,则用dac_zero减去2x作为参考位置。
20.所述步骤(33)中通过其中,target1和target2分别为3d霍尔角度传感器在行程起点和终点的理论输出值;voltage1和voltage2分别为3d霍尔角度传感器在行程起点和行程终点的电压值;x为3d霍尔角度传感器的输出值的最大值;voltage为3d霍尔角度传感器的输出值为最大值时对应的电压值。
21.所述步骤(34)中通过计算中间增益,通过dac_offset=target1‑
out1×
dac_gain计算中间偏置,其中,dac_gain为中间增益,target1和target2分别为3d霍尔角度传感器在行程起点和终点的理论输出值,out1、out2分别为3d霍尔角度传感器在行程起点和终点的输出值,dac_offset为中间偏置;增益指数multi的初始值为1,如果dac_gain小于0,则对dac_gain取绝对值,multi取值
‑
1。
22.所述步骤(35)中通过计算最终增益,通过计算最终偏置,其中,gain为最终增益,multi为增益指数,dac_gain为中间增益,x为3d霍尔角度传感器的输出值的最大值,offset为最终偏置,dac_offset为中间偏置。
23.有益效果
24.由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:本发明消除了传感器输出值中存在的折点,无需人工判断传感器安装方向,一次计算即可得出标定参数,节省人力和时间成本,提高了传感器标定效率;标定后的传感器测量精度提高,使传感器测量结果更加准确。
附图说明
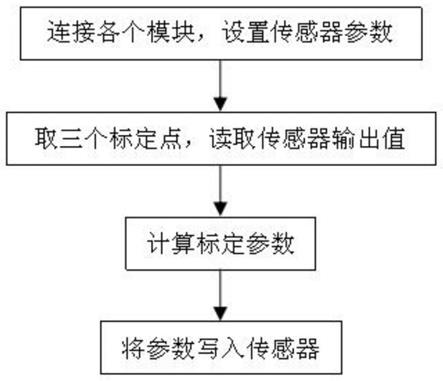
25.图1是本发明实施方式的流程图。
26.图2是本发明实施方式中的传感器安装方向图。
27.图3是本发明实施方式中的传感器输出与实际值的理论关系图。
28.图4是标定之前行程范围内传感器输出值示意图。
29.图5是标定之后行程范围内传感器输出值示意图,其中实线为进行线性优化之前的传感器输出值,虚线为进行线性优化之后的传感器输出值。
具体实施方式
30.下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所附权利要求书所限定的范围。
31.本发明的实施方式涉及一种3d霍尔角度传感器的三点标定方法,如图1所示,包括以下步骤:
32.步骤一:将上位机分别与运动模块和传感器标定设备通信连接,传感器标定设备与待标定的传感器电连接,所述运动模块为电机,所述待标定传感器为3d霍尔角度传感器。连接各个模块后,设置传感器的感应磁场等参数。
33.步骤二:设置标定范围以及传感器电压输出范围,图2为传感器安装方式,传感器输出值沿箭头方向增大,假设设置的标定范围为angle1、angle2,电压范围为voltage1、voltage2,传感器输出电压范围为0到voltage(见图3)。上位机软件控制电机移动,直到传感器输出值有明显改变,此位置作为行程起点,根据传感器测量范围来确定行程终点,行程起点至行程终点的距离为传感器测量范围。分别读取传感器在行程起点和行程终点的输出值,再在行程中间取一点,为避免传感器输出值波动,中间点不可过于靠近起点或终点,读取传感器的输出值。如图2所示,1为起点,2为终点。分别读取传感器在行程起点和行程终点的输出值,再在行程中间处取一点3,为避免传感器输出值波动对计算结果造成影响,中间点不可过于靠近起点或终点。
34.步骤三:根据输出值计算标定参数,并把参数写入传感器,具体方法如下:
35.(1)计算角度范围,这一步的目的是为了消除传感器输出值中的折点,判断三个输出值的大小关系,由于传感器安装方向不确定,输出值有可能不是线性关系,即存在折点,设三个输出值为out1、out2、out3,其中out1、out2分别为起点和终点输出值,out3为中间点输出值,根据其大小关系可分为以下四种情况:
36.①
out1<out3<out2,说明输出值趋势是增大的,所以角度范围angle_range=out2-out1;
37.②
out2<out3<out1,说明输出值趋势是减小的,所以角度范围angle_range=out1-out2;
38.③
out3<out1<out2或者out1<out2<out3,说明存在折点,输出值趋势是先减小后增大的,所以角度范围angle_range=32768-out2+out1;
39.④
out3<out2<out1或者out2<out1<out3,说明存在折点,输出值趋势是先增大后减
小的,所以角度范围angle_range=32768-out1+out2;
40.显而易见,图2所示的为out2<out1<out3,符合第
④
种情况,因此角度范围angle_range=32768-out1+out2。
41.(2)计算参考位置,利用参考位置可以将不连续点移至测量范围外最大距离,计算公式如下:如果参考位置dac_zero大于65536,则用dac_zero减去65536作为参考位置;
42.(3)计算目标值,这一步是为了计算传感器在行程起点和行程终点的理论输出值:
43.(4)计算中间增益和增益指数:增益指数multi的初始值为1,如果dac_gain小于0,则对dac_gain取绝对值,multi取值
‑
1;
44.(5)计算中间偏置:dac_offset=target1‑
out1×
dac_gain;
45.(6)计算最终增益,通过最小二乘法进一步线性优化,提高传感器的测量准确度:
46.(7)计算最终偏置:
47.(8)将参考位置、增益指数、最终增益和最终偏置写入传感器。
48.图4是标定之前行程范围内传感器输出值示意图。图5是标定之后行程范围内传感器输出值示意图,图5中实线为进行线性优化之前的传感器输出值,虚线为进行线性优化之后的传感器输出值。从图4和图5相比后可以发现,本发明提供的标定方法消除了传感器输出值中的折点,且减小了传感器的测量误差。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1