一种机场地面目标进出跑道的检测方法和系统与流程
[0001]
本发明涉及技术领域,尤其涉及一种机场地面目标进出跑道的检测方法和系统。
背景技术:
[0002]
在机场跑道冲突告警系统中,需要可靠地检测飞机进出跑道的状态。当前,针对空中的飞机降落进入和起飞离开跑道的检测方案,包括场面监视雷达、空管二次监视雷达、多点定位系统等。通过场面监视雷达系统,依据电磁波反射探测飞机的大型雷达,监视整个场面。通过空管二次监视雷达系统,依据地面询问机和机载应答机的应答给装有机载应答机的飞行器定位的雷达系统,可以监视场面的部分飞机和空中的飞机。通过多点定位系统,利用多个地面站接收航空器发射的同一应答信号,通过计算各地面站接收的时间差实现航空器定位的系统,这种模式可以监视场面的飞机。但是,场面监视雷达系统和空管二次监视雷达系统的建设和运行维护成本高、电磁辐射大、大机场结构复杂时存在盲区,另外,多点定位系统也存在建设为运行维护成本高、施工量大等问题。
技术实现要素:
[0003]
为解决背景技术中存在的技术问题,本发明提出一种机场地面目标进出跑道的检测方法和系统。
[0004]
本发明提出的一种机场地面目标进出跑道的检测方法,在跑道出入口设置雷达对进出跑道的地面目标进行监视,包括:
[0005]
获取跑道出入口的地面目标雷达数据,所述雷达数据包括:目标的距离、方位、多普勒速度和雷达散射截面rcs;
[0006]
根据目标的多普勒速度判定目标的运动方向;
[0007]
根据目标的距离和方位确定目标所处的位置。
[0008]
优选地,所述获取跑道出入口的地面目标雷达数据,具体包括:获取通过联络道进出跑道的第一目标雷达数据。
[0009]
优选地,所述根据目标的多普勒速度判定目标的运动方向,具体包括:根据第一目标的多普勒速度v1(远离雷达方向为正),如果v1>v0,输出第一目标从联络道出跑道的提示;
[0010]
优选地,所述根据目标的距离和方位确定目标所处的位置,具体包括:将雷达覆盖的机场跑道的联络道区域划分为占用区r1和等待区r2,根据第一目标的距离和方位确定第一目标所处的位置为占用区r1或者等待区r2;
[0011]
如果第一目标处于占用区r1,输出跑道占用的提示;
[0012]
如果第一目标处于等待区r2,输出跑道等待区占用的提示。
[0013]
优选地,所述获取跑道出入口的目标雷达数据,具体包括:获取离开机场跑道驶入快速脱离道的第二目标雷达数据。
[0014]
优选地,所述根据目标的多普勒速度判定目标的运动方向,具体包括:根据第二目
标的多普勒速度v2(远离雷达方向为正),如果v2<-v0时,输出第二目标误入快速脱离道的告警;
[0015]
优选地,所述根据目标的距离和方位确定目标所处的位置,具体包括:将雷达覆盖的机场跑道的快速脱离道区域划分为占用区r1和脱离区r2,根据第二目标的距离和方位确定第二目标所处的位置为占用区r1或者脱离区r2;
[0016]
如果第二目标处于占用区r1,输出第二目标即将脱离的提示,
[0017]
如果第二目标处于脱离区r2,输出第二目标脱离的提示。
[0018]
优选地,所述获取跑道出入口的地面目标雷达数据,具体包括:获取进出跑道穿越点的第三目标的两部雷达数据。
[0019]
优选地,所述根据目标的多普勒速度判定目标的运动方向,具体包括:根据第三目标的多普勒速度v3(远离雷达方向为正),如果v3<-v0,输出第三目标从穿越点出跑道的提示;如果v3>v0,输出第三目标从穿越点进跑道的提示。
[0020]
优选地,所述根据目标的距离和方位确定目标所处的位置,具体包括:将雷达覆盖的穿越点的区域分为占用区r1、等待/脱离区r2和r3,根据第三目标的距离和方位确定第三目标所处的位置为占用区r1、等待/脱离区r2或r3;
[0021]
如果第三目标处于占用区r1,输出跑道占用提示;
[0022]
如果第三目标处于等待/脱离区r2或r3,输出等待/脱离区r2或r3占用的提示。
[0023]
本发明还提出了一种机场地面目标进出跑道的检测系统,在跑道出入口设置雷达对进出跑道的地面目标进行监视,包括:
[0024]
数据获取模块,用于获取跑道出入口的目标雷达数据,所述雷达数据包括:目标的距离、方位、多普勒速度和雷达散射截面rcs;
[0025]
状态判定模块,用于根据目标的多普勒速度判定目标的运动方向;
[0026]
位置确定模块,用于根据目标的距离和方位确定目标所处的位置。
[0027]
优选地,数据获取模块,具体用于获取通过联络道进出跑道的第一目标雷达数据;
[0028]
优选地,状态判定模块,具体用于根据第一目标的多普勒速度v1(远离雷达方向为正),如果v1>v0,输出第一目标从联络道出跑道的提示;
[0029]
优选地,位置确定模块,具体用于根据第一目标的距离和方位确定第一目标所处的位置为占用区r1或者等待区r2;
[0030]
如果第一目标处于占用区r1,输出跑道占用的提示;
[0031]
如果第一目标处于等待区r2,输出跑道等待区占用的提示;
[0032]
其中,将雷达覆盖的机场跑道的联络道区域划分为占用区r1和等待区r2。
[0033]
优选地,数据获取模块,具体用于获取离开机场跑道驶入快速脱离道的第二目标雷达数据;
[0034]
优选地,状态判定模块,具体用于根据第二目标的多普勒速度v2(远离雷达方向为正),如果v2<-v0时,输出第二目标误入快速脱离道的告警;
[0035]
优选地,位置确定模块,具体用于根据第二目标的距离和方位确定第二目标所处的位置为占用区r1或者脱离区r2;
[0036]
如果第二目标处于占用区r1,输出第二目标即将脱离的提示;
[0037]
如果第二目标处于脱离区r2,输出第二目标脱离的提示;
[0038]
其中,将雷达覆盖的机场跑道的快速脱离道区域划分为占用区r1和脱离区r2。优选地,数据获取模块,具体用于获取进出跑道穿越点的第三目标的两部雷达数据;
[0039]
优选地,状态判定模块,具体用于根据第三目标的多普勒速度v3(远离雷达方向为正),如果v3<-v0,输出第三目标从穿越点出跑道的提示;如果v3>v0,输出第三目标从穿越点进跑道的提示;
[0040]
优选地,位置确定模块,具体用于根据第三目标的距离和方位确定第三目标所处的位置为占用区r1、等待/脱离区r2或r3;
[0041]
如果第三目标处于占用区r1,输出跑道占用提示;
[0042]
如果第三目标处于等待/脱离区r2或r3,输出等待/脱离区r2或r3占用的提示。
[0043]
本发明中,通过在机场跑道的联络道、快速脱离道、穿越点等出入口安装雷达,对进出跑道的地面目标进行监视,根据地面目标的多普勒速度确定其运动方向,根据地面目标的距离和方位确定其所处的区域,实现了对地面目标进出跑道的准确检测,在施工、维护、成本等方面实现了对联络道、快速脱离道、穿越点等跑道出入位置地面目标的可靠监控。
附图说明
[0044]
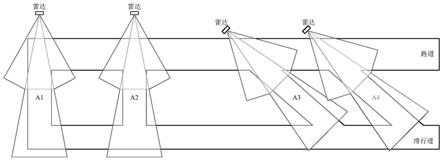
图1为本发明中联络道和快速脱离道的雷达安装位置示意图。
[0045]
图2为本发明中跑道穿越点的雷达安装位置示意图。
[0046]
图3为本发明中联络道的监视区域设置示意图。
[0047]
图4为本发明中快速脱离道的监视区域设置示意图。
[0048]
图5为本发明中跑道穿越点的监视区域设置示意图
具体实施方式
[0049]
如图1和图2所示,图1为本发明中联络道和快速脱离道的雷达安装位置示意图,图2为本发明中跑道穿越点的雷达安装位置示意图。
[0050]
参照图1,在机场跑道与滑行道之间设有联络道a1和a2,以及快速脱离道a3和a4,为了实现对进出机场跑道的地面目标进行位置检测,在机场跑道的联络道、快速脱离道的出入口安装雷达,该雷达可以为毫米波雷达。毫米波雷达的安装方式为每个毫米波雷达覆盖一个跑道出入口,安装位置为跑道外侧的地面上,安装方向应确保雷达的探测范围覆盖跑道的联络道或快速脱离道。
[0051]
参照图2,在大型机场的设计中,在机场跑道的两侧都设有滑行道,在机场跑道上形成穿越点,在两个滑行道外侧的空地上分别设有一部毫米波雷达,确保雷达覆盖穿目标穿越路线。
[0052]
参照图1和图3,对于联络道的雷达监视区域,将雷达覆盖的跑道与联络道区域划分为占用区r1和等待区r2,r1和r2之间由跑道外等待线分割。
[0053]
参照图1和图4,对于快速脱离道的雷达监视区域,将雷达覆盖的快速脱离道区域划分为占用区r1和脱离区r2,r1和r2之间由快速脱离道出口的“no entry禁止进入”标志分割。
[0054]
参照图1和图5,对于穿越点的雷达监视区域,将雷达覆盖的穿越点区域划分为r1、
r2和r3,其中r1为占用区,r2和r3为等待/脱离区,r1与r2、r1与r3之间由跑道外等待线分割。
[0055]
如图1所示,图1为本发明提出的一种地面目标进入机场跑道的位置检测方法的流程示意图。
[0056]
参照图1,本发明提出的一种地面目标进出机场跑道的位置检测方法,包括;
[0057]
s1、获取跑道出入口的地面目标雷达数据,所述雷达数据包括:地面目标的距离、方位、多普勒速度和rcs(radar cross section,雷达散射截面);过滤掉rcs小于σ0的雷达数据;
[0058]
s2、根据目标的多普勒速度判定目标的运动方向;
[0059]
s3、根据目标的距离和方位确定目标所处的位置。
[0060]
参照图1和图3,本发明第一实施例提出的一种地面目标进出机场跑道的位置检测方法,包括;
[0061]
获取通过联络道进出跑道的第一目标雷达数据;所述雷达数据包括:第一地面目标的距离、方位、多普勒速度和rcs;过滤掉rcs小于σ_0的雷达数据;
[0062]
根据第一地面目标的多普勒速度v1判定第一地面目标的运动方向,具体地,当v1>v0时,输出第一地面目标从联络道出跑道的提示,否则,输出第一地面目标从联络道进跑道的提示;
[0063]
根据第一地面目标的距离和方位确定第一地面目标所处的位置为占用区r1或者等待区r2;
[0064]
当第一地面目标的位置处于占用区r1,输出跑道占用提示,
[0065]
当第一地面目标的位置处于等待区r2,输出跑道等待区占用提示。
[0066]
参照图1和图4,本发明第二实施例提出的一种地面目标进出机场跑道的位置检测方法,包括;
[0067]
获取离开机场跑道驶入快速脱离道的第二目标雷达数据;所述雷达数据包括:第二地面目标的距离、方位、多普勒速度和rcs;过滤掉rcs小于σ0的雷达数据;
[0068]
根据第二地面目标的多普勒速度v2判定目标的运动方向,具体地,当v2<-v0时,输出第二地面目标误入快速脱离道的告警;否则,输出第二目标从跑道进入驶入快速脱离道的提示;
[0069]
根据第二目标的距离和方位确定第二目标所处的位置为占用区r1或者脱离区r,具体包括;
[0070]
当第二地面目标的位置处于占用区r1,输出第二地面目标即将脱离的提示,
[0071]
当第二地面目标的位置处于脱离区r2,输出第二地面目标脱离的提示。
[0072]
参照图1和图5,本发明第三实施例提出的一种地面目标进出机场跑道的位置检测方法,包括;
[0073]
获取进入机场跑道的第三地面目标的两部雷达数据,所述雷达数据包括:第三地面目标的距离、方位、多普勒速度和rcs;过滤掉rcs小于σ0的雷达数据;
[0074]
对雷达探测到的每个第三地面目标,检测其是否处在r1、r2或者r3区域内。如果r1区域内存在地面目标,输出跑道占用提示;如果r2或者r3区域内区域内存在目标,输出等待/脱离区r2或r3占用的提示。
[0075]
检查地面目标的多普勒速度v3,如果v3≤-v0,输出目标从穿越点出跑道提示;如果v3>v0,输出第三目标从穿越点进跑道的提示。
[0076]
本发明中,通过在机场跑道的联络道、快速脱离道、穿越点等出入口安装雷达,对进出跑道的地面目标进行监视,根据地面目标的多普勒速度确定其运动方向,根据地面目标的距离和方位确定其所处的区域,实现了对地面目标进出跑道的准确检测,在施工、维护、成本等方面实现了对联络道、快速脱离道、穿越点等跑道出入位置地面目标的可靠监控。
[0077]
毫米波雷达使用微型量产雷达,其成本低,施工维护工作量小;在跑道穿越点、联络道、快速脱离道作用范围内不存在盲区;可检测飞机、车辆、人员等地面目标;可在大雨、浓雾、夜间等各种气象条件下工作,环境适应能力好。
[0078]
本发明实施例还提出了一种地面目标进入机场跑道的位置检测系统,在机场跑道的外侧设置雷达对地面目标进行检测,包括:
[0079]
数据获取模块,用于获取跑道出入口的目标雷达数据,所述雷达数据包括:目标的距离、方位、多普勒速度和雷达散射截面rcs;
[0080]
状态判定模块,用于根据目标的多普勒速度判定目标的运动方向;
[0081]
位置确定模块,用于根据目标的距离和方位确定目标所处的位置。
[0082]
本发明第四实施例提出的一种地面目标进出机场跑道的位置检测系统,包括:
[0083]
数据获取模块,具体用于获取通过联络道进出跑道的第一目标雷达数据;
[0084]
状态判定模块,具体用于根据第一目标的多普勒速度v1(远离雷达方向为正),如果v1>v0,输出第一目标从联络道出跑道的提示;
[0085]
位置确定模块,具体用于根据第一目标的距离和方位确定第一目标所处的位置为占用区r1或者等待区r2;
[0086]
如果第一目标处于占用区r1,输出跑道占用的提示;
[0087]
如果第一目标处于等待区r2,输出跑道等待区占用的提示;
[0088]
其中,将雷达覆盖的机场跑道的联络道区域划分为占用区r1和等待区r2。
[0089]
本发明第五实施例提出的一种地面目标进出机场跑道的位置检测系统,包括:
[0090]
数据获取模块,具体用于获取离开机场跑道驶入快速脱离道的第二目标雷达数据;
[0091]
状态判定模块,具体用于根据第二目标的多普勒速度v2(远离雷达方向为正),如果v2<-v0时,输出第二目标误入快速脱离道的告警;
[0092]
位置确定模块,具体用于根据第二目标的距离和方位确定第二目标所处的位置为占用区r1或者脱离区r2;
[0093]
如果第二目标处于占用区r1,输出第二目标即将脱离的提示,
[0094]
如果第二目标处于脱离区r2,输出第二目标脱离的提示;
[0095]
其中,将雷达覆盖的机场跑道的快速脱离道区域划分为占用区r1和脱离区r2。
[0096]
本发明第六实施例提出的一种地面目标进出机场跑道的位置检测系统,包括:
[0097]
数据获取模块,具体用于获取进出跑道穿越点的第三目标的两部雷达数据;
[0098]
状态判定模块,具体用于根据第三目标的多普勒速度v3(远离雷达方向为正),如果v3<-v0,输出第三目标从穿越点出跑道的提示;如果v3>v0,输出第三目标从穿越点进
跑道的提示;
[0099]
位置确定模块,具体用于根据第三目标的距离和方位确定第三目标所处的位置为占用区r1、等待/脱离区r2或r3;
[0100]
如果第三目标处于占用区r1,输出跑道占用提示;
[0101]
如果第三目标处于等待/脱离区r2或r3,输出等待/脱离区r2或r3占用的提示。
[0102]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1