一种基于超声波雷达系统的障碍物识别方法与流程
1.本发明涉及超声波雷达技术领域,尤其涉及一种基于超声波雷达系统的障碍物识别方法。
背景技术:
2.目前汽车倒车雷达均采用超声波雷达,因其价格低廉,汽车装配率较高。超声波雷达也有其固有缺点,超声波是声波,单发单收,只能判定障碍物的距离,无法识别障碍物的角度方位,而且不能识别障碍物的高低。
3.因此,现有技术有待进一步改进。
技术实现要素:
4.本发明提供一种基于超声波雷达系统的障碍物识别方法,旨在解决现有技术中超声波探头只能测量最近障碍物的缺陷,实现了对障碍物的纵深距离进行测量。
5.为达到上述目的,本发明所采取的技术方案为:
6.一种基于超声波雷达系统的障碍物识别方法,所述超声波雷达系统至少包括三个参数一致的超声波雷达,所述方法包括:
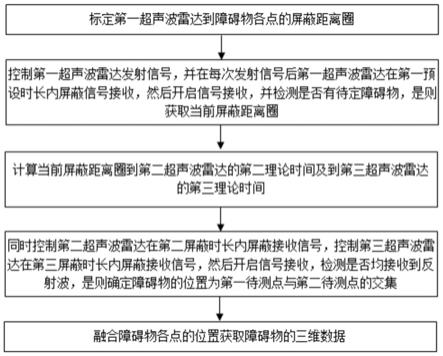
7.步骤1、标定第一超声波雷达到障碍物各点的屏蔽距离圈;
8.步骤2、控制所述第一超声波雷达发射信号,并在每次发射信号后所述第一超声波雷达在第一预设时长内屏蔽信号接收,然后开启信号接收,并检测是否有待定障碍物,是则获取当前屏蔽距离圈;
9.步骤3、计算所述当前屏蔽距离圈到第二超声波雷达的第二理论时间及到第三超声波雷达的第三理论时间;
10.步骤4、同时控制所述第二超声波雷达在第二屏蔽时长内屏蔽接收信号,控制所述第三超声波雷达在第三屏蔽时长内屏蔽接收信号,然后开启信号接收,检测是否均接收到反射波,是则确定障碍物的位置为第一待测点与第二待测点的交集;
11.步骤5、融合障碍物各点的位置获取障碍物的三维数据。
12.具体地,所述步骤1包括:
13.步骤101、设置第一超声波雷达的总发射次数,所述总发射次数为所述量化级;
14.步骤102、控制第一超声波雷达发射信号,同时控制其它超声波雷达处于关闭状态,并在每次发射信号后所述第一超声波雷达在第一预设时长内屏蔽信号接收;
15.步骤103、依次获取障碍物各点到第一超声波雷达的屏蔽距离;
16.步骤104、以所述屏蔽距离为半径、所述第一超声波雷达的fov角为球心角建立屏蔽距离圈。
17.具体地,所述步骤101包括:
18.步骤a、设定超声波探头的最远探测距离和最近探测距离;
19.步骤b、根据所述最远探测距离和最近探测距离获取超声波雷达的接收时间窗口
长度;
20.步骤c、根据超声波雷达的分辨率对所述接收时间窗口长度进行量化,获得量化级。
21.具体地,所述接收时间窗口长度δt=2(lmin
‑
lmax*)/v,其中lmax表示超声波探头的最远探测距离,lmin表示超声波探头的最近探测距离,v表示声速。
22.具体地,所述量化级n=[δt/r]+1,其中,r表示超声波雷达的最小分辨率。
[0023]
具体地,所述第一预设时长t1(n)=lmin+n*(lmax
‑
lmin)/v*n,其中n取值为(1:n)。
[0024]
具体地,所述屏蔽距离r1(n)=v*t1(n)/2。
[0025]
具体地,所述步骤3包括:
[0026]
步骤301、以所述第一超声波雷达为原点,所述第一超声波雷达的径向法线为y轴,以过所述原点平行于地面为x轴,以过所述原点垂直于地面为z轴,建立xyz坐标系。
[0027]
步骤302、确定所述当前屏蔽距离圈的扇形球面弧长。
[0028]
步骤303、根据所述当前屏蔽距离圈对应的所述待定障碍物的第一坐标值与所述第一超声波雷达的安装坐标建立第一距离。
[0029]
步骤304、根据所述待定障碍物的第一坐标值与所述第二超声波雷达的第二安装坐标建立第二距离,根据所述待定障碍物的第一坐标值与所述第三超声波雷达的第三安装坐标建立第三距离。
[0030]
步骤305、将第二距离中最小者记为最近第一待测点,最大者点记为最远第一待测点,将所述第三距离中最小者记为最近第二待测点,最大者点记为最远第二待测点。
[0031]
步骤306、将所述最近第一待测点、最远第一待测点之间的扇形球面弧长以第二超声波雷达的最小分辨率为步长分进行均分,得到预设数个第一各待测点,将所述最近第二待测点、最远第二待测点之间的扇形球面弧长以第三超声波雷达的最小分辨率为步长分进行均分,得到预设数个第二各待测点。
[0032]
步骤307、解算所述第一各待测点到所述第二超声波雷达的第二理论时间;
[0033]
步骤308、解算所述第二各待测点到所述第三超声波雷达的第三理论时间。
[0034]
具体地,所述扇形球面弧长d=α*r1(n),α表示第一超声波雷达的fov角。
[0035]
具体地,所述预设数k=[d/r],[]表示取整。
[0036]
具体地,所述步骤307包括:
[0037]
步骤3071、获取所述第一超声波雷达与所述第二超声波雷达的中心连线的第一安装距离,及所述中心连线与x轴的第一夹角;
[0038]
步骤3072、根据所述第一夹角、第一超声波雷达的fov角、第一安装距离、当前屏蔽距离,计算所述第一各待测点与所述第二超声波雷达的第二待测距离;
[0039]
步骤3073、根据所述第二待测距离计算第二理论时间。
[0040]
具体地,所述第二待测距离
[0041][0042]
其中,h1表示第一安装距离,r1(n)表示当前屏蔽距离,θ1表示第一夹角,α表示第
一超声波雷达的fov角,i=1,2,3
…
k,表示各待测点序号。
[0043]
具体地,所述第二理论时间t2(i)=[r1(n)+g2(i)]/v。
[0044]
具体地,所述步骤308包括:
[0045]
步骤3081、获取所述第一超声波雷达与所述第三超声波雷达的中心连线的第二安装距离,及所述中心连线与x轴的第二夹角;
[0046]
步骤3082、根据所述第二圆心角、第二夹角、第一超声波雷达的fov角、第二安装距离、当前屏蔽距离,计算所述第二各待测点与所述第三超声波雷达的第三待测距离;
[0047]
步骤3083、根据所述第三待测距离计算第三理论时间。
[0048]
具体地,所述第三待测距离
[0049][0050]
其中,h2表示第二安装距离,r1(n)表示当前屏蔽距离,θ2表示第二夹角,α表示第一超声波雷达的fov角,i=1,2,3
…
k,表示各待测点序号。
[0051]
具体地,所述第三理论时间t3(i)=[r1(n)+g3(i)]/v。
[0052]
具体地,所述第二屏蔽时长t2(q)=t1(n)/2+t2(q),所述第三屏蔽时长t3(q)=t1(n)/2+t3(q),其中q=1,2,
…
k。
[0053]
本发明的有益效果在于:本发明利通过一个超声波雷达发射超声波信号,其它超声波雷达不发射信号,同步启动接收声波,经过三个或以上的超声波探头接收到回波信号,计算出障碍物的距离,有效定位出障碍物的距离、方位和高度,进而通过数据融合,对障碍物的形状进行测量,解决了超声波探头只能测量最近障碍物的距离问题,实现了对障碍物的纵深距离进行测量。
附图说明
[0054]
图1是本发明的基于超声波雷达系统的障碍物识别方法的流程示意图;
[0055]
图2是本发明的屏蔽距离圈的示意图;
[0056]
图3是本发明的解算第二待测距离的示意图。
具体实施方式
[0057]
下面结合附图具体阐明本发明的实施方式,附图仅供参考和说明使用,不构成对本发明专利保护范围的限制。
[0058]
如图1所示,本实施例提供一种基于超声波雷达系统的障碍物识别方法,所述超声波雷达系统至少包括三个参数一致的超声波雷达,所述方法包括:
[0059]
步骤1、标定第一超声波雷达到障碍物各点的屏蔽距离圈s1(n)。
[0060]
所述屏蔽距离圈是指超声波雷达不接收反射波的某一距离范围。例如,如果屏蔽距离圈是1米,则不接收1米范围之内的反射波,而只接收1米范围之外的反射波。
[0061]
容易理解,屏蔽距离圈是以超声波雷达为中心的扇形球面。如图2所示,o点表示超声波雷达,∠aob表示超声波雷达的fov角α,oa表示屏蔽距离,则以o为球心、oa为半径、球心角为α的扇形球面即为屏蔽距离oa对应的屏蔽距离圈。
[0062]
如图3所示,第一超声波雷达(1#超声波雷达)安装在o1位置,第二超声波雷达(2#超声波雷达)安装在o1位置,第三超声波雷达(3#超声波雷达)安装在o3位置。当然,也可以根据需要安装更多的超声波雷达。
[0063]
在本发明的一个实施例中,所述步骤4包括:
[0064]
步骤101、设置第一超声波雷达的总发射次数,所述总发射次数为所述量化级n。
[0065]
在本实施例中,所述量化级n的确定方法包括:
[0066]
步骤a、设定超声波探头的最远探测距离lmax和最近探测距离lmin。
[0067]
步骤b、根据所述最远探测距离lmax和最近探测距离lmin获取超声波雷达的接收时间窗口长度δt。
[0068]
步骤c、根据超声波雷达的分辨率对所述接收时间窗口长度δt进行量化,获得量化级n。
[0069]
在本实施例中,所述接收时间窗口长度δt=2(lmin
‑
lmax*)/v,其中v表示声速。
[0070]
所述量化级n=[δt/r]+1,其中,r表示超声波雷达的最小分辨率。
[0071]
步骤102、控制第一超声波雷达第n次发射信号,同时控制其它超声波雷达处于关闭状态,并在每次发射信号后所述第一超声波雷达在第一预设时长t1(n)内屏蔽信号接收。
[0072]
在本实施例中,所述第一预设时长t1(n)=tmin+n*(tmax
‑
tmin)/n,其中n取值为(1:n)。
[0073]
步骤103、依次获取障碍物各点到第一超声波雷达的n个屏蔽距离r1(n)。
[0074]
在本实施例中,所述r1(n)=v*t1(n)/2。
[0075]
例如,第一超声波雷达通过n次发射接收信号后得到的屏蔽距离如表1:
[0076]
表1
[0077]
n12
…
28屏蔽时间t1(n)1.764ms2.352ms..17.64ms屏蔽距离r1(n)0.299m0.399m..2.989m
[0078]
步骤104、以所述屏蔽距离r1(n)为半径、所述第一超声波雷达的fov角为球心角建立屏蔽距离圈s1(n)。
[0079]
同理,可以得到其它超声波雷达的屏蔽距离圈。
[0080]
步骤2、控制所述第一超声波雷达发射信号,并在每次发射信号后所述第一超声波雷达在第一预设时长t1(n)内屏蔽信号接收,然后开启信号接收,并检测是否有待定障碍物,是则获取当前屏蔽距离圈s1(n)。
[0081]
所述待定障碍物是指第一超声波雷达能探测到有障碍物存在,但是不能确定该障碍物的具体方位,可能分布于所述当前屏蔽距离圈s1(n)所表示的扇形球面上的任何一点。
[0082]
步骤3、计算所述当前屏蔽距离圈s1(n)到第二超声波雷达的第二理论时间t2(i)及到第三超声波雷达的第三理论时间t3(i)。
[0083]
在本实施例中,所述步骤3包括:
[0084]
步骤301、以所述第一超声波雷达为原点,所述第一超声波雷达的径向法线为y轴,以过所述原点平行于地面为x轴,以过所述原点垂直于地面为z轴,建立xyz坐标系。
[0085]
步骤302、确定所述当前屏蔽距离圈s1(n)的扇形球面弧长d。
[0086]
在本实施例中,所述扇形球面弧长d=α*r1(n),α表示第一超声波雷达的fov角。
[0087]
步骤303、根据所述当前屏蔽距离圈s1(n)对应的所述待定障碍物的第一坐标值(x1,y1,z1)与所述第一超声波雷达的安装坐标(a1,b1,c1)建立第一距离r1(n)。
[0088]
在本实施例中,所述第一距离
[0089]
容易理解,所述待定障碍物的第一坐标值(x1,y1,z1)可以是所述当前屏蔽距离圈s1(n)所表示的扇形球面上的任意一点的坐标值。
[0090]
步骤304、根据所述待定障碍物的第一坐标值(x1,y1,z1)与所述第二超声波雷达的第二安装坐标(a2,b2,c2)建立第二距离r2,根据所述待定障碍物的第一坐标值(x1,y1,z1)与所述第三超声波雷达的第三安装坐标(a3,b3,c3)建立第三距离r3。
[0091]
在本实施例中,所述第二距离
[0092]
在本实施例中,所述第三距离
[0093]
容易理解,所述第二距离r2、第三距离r3的值并非固定,而是随着所述待定障碍物的第一坐标值(x1,y1,z1)的变化而变化。
[0094]
步骤305、将第二距离r2中最小者记为最近第一待测点p2(1),最大者点记为最远第一待测点p2(k),将所述第三距离r3中最小者记为最近第二待测点p3(1),最大者点记为最远第二待测点p3(k)。
[0095]
步骤306、将所述最近第一待测点p2(1)、最远第一待测点p2(k)之间的扇形球面弧长d以第二超声波雷达的最小分辨率r为步长分进行均分,得到预设数k个第一各待测点p2(i),将所述最近第二待测点p3(1)、最远第二待测点p3(k)之间的扇形球面弧长d以第三超声波雷达(2#)的最小分辨率r为步长分进行均分,得到预设数k个第二各待测点p3(i)。
[0096]
在本实施例中,所述预设数k=[d/r],[]表示取整。
[0097]
步骤307、解算所述第一各待测点p2(i)(i=1,2,3
…
k)到所述第二超声波雷达的第二理论时间t2(i)。
[0098]
在本实施例中,所述步骤307包括:
[0099]
步骤3071、获取所述第一超声波雷达与所述第二超声波雷达的中心连线的第一安装距离h1,及所述中心连线与x轴的第一夹角θ1。
[0100]
如图3所示,第一超声波雷达与所述第二超声波雷达的中心连线o1o2的距离即为第一安装距离h1,o1o2与x轴的夹角即为第一夹角θ1。
[0101]
步骤3072、根据所述第一夹角θ1、第一超声波雷达的fov角α、第一安装距离h1、当前屏蔽距离r1(n),计算所述第一各待测点p2(i)与所述第二超声波雷达的第二待测距离g2(i)。
[0102]
在图3中,p2(i)o2的距离即为第二待测距离g2(i)。
[0103]
在本实施例中,
[0104]
[0105]
步骤3073、根据所述第二待测距离g2(i)计算第二理论时间t2(i)。
[0106]
在本实施例中,所述第二理论时间t2(i)=[r1(n)+g2(i)]/v。
[0107]
步骤308、解算所述第二各待测点p3(i)(i=1,2,3
…
k)到所述第三超声波雷达的第三理论时间t3(i)。
[0108]
在本实施例中,与步骤307类似,所述步骤308包括:
[0109]
步骤3081、获取所述第一超声波雷达与所述第三超声波雷达的中心连线的第二安装距离h2,及所述中心连线与x轴的第二夹角θ2;
[0110]
步骤3082、根据所述第二夹角θ2、第一超声波雷达的fov角α、第二安装距离h2、当前屏蔽距离r1(n),计算所述第二各待测点p3(i)与所述第三超声波雷达的第三待测距离g3(i)。
[0111]
在本实施例中,
[0112][0113]
步骤3083、根据所述第三待测距离g3(i)计算第三理论时间t3(i)。
[0114]
在本实施例中,t3(i)=[r1(n)+g3(i)]/v。
[0115]
步骤4、同时控制所述第二超声波雷达在第二屏蔽时长t2(q)内屏蔽接收信号,控制所述第三超声波雷达在第三屏蔽时长t3(q)内屏蔽接收信号,然后开启信号接收,检测是否均接收到反射波,是则确定障碍物的位置为第一待测点p2(q)与第二待测点p3(q)的交集。
[0116]
其中,所述第二屏蔽时长t2(q)=t1(n)/2+t2(q),其中q=1,2,
…
k。
[0117]
所述第三屏蔽时长t3(q)=t1(n)/2+t3(q),其中q=1,2,
…
k。
[0118]
步骤5、融合障碍物各点的位置获得障碍物的三维数据。
[0119]
以上所揭露的仅为本发明的较佳实施例,不能以此来限定本发明的权利保护范围,因此依本发明申请专利范围所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1