一种基于光束直径变化的激光测距系统的制作方法
1.本发明属于激光测距技术领域,具体为一种基于光束直径变化的激光测距系统。
背景技术:
2.随着激光探测技术的高速发展,激光探测技术用来测距的应用也越来越广泛。例如,面向智能驾驶的激光测距装置越来越受到广泛的关注。现有的激光测距装置可以包括机械扫描式激光测距装置、微机电系统扫描式激光测距装置以及mems激光测距装置,机械扫描式激光测距装置和微机电系统扫描式激光测距装置具有探测距离长,且图像分辨率高的优点,但是,扫描式激光测距装置由于存在转动部件,使用寿命较低,稳定性较差。mems激光测距装置仅能实现一定视角的测距扫描。
3.现有的通过计量激光传播时间来测量距离的方法由于无法精确地测量掌握激光的传播时间,往往微小的时间差在极高的激光传播速度的影响下,会导致测量误差极大。鉴于此,我们提出一种基于光束直径变化的激光测距系统。
技术实现要素:
4.本发明的目的在于提供一种基于光束直径变化的激光测距系统,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
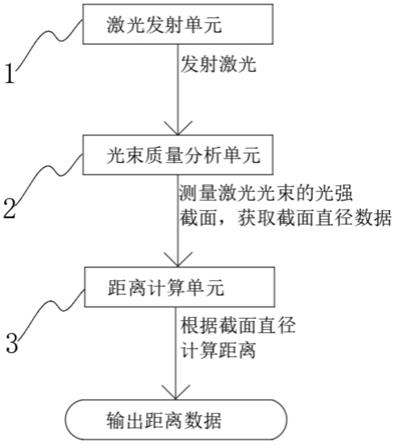
6.一种基于光束直径变化的激光测距系统,包括激光发射单元、光束质量分析单元和距离计算单元,所述激光发射单元用于发射测距激光,所述光束质量分析单元用于分析光束的光束质量因子,所述距离计算单元用于通过光束的直径计算激光发射位置与接收位置之间的距离。
7.优选的,所述激光发射单元包括单片机、激光二极管组、电容、电阻、二极管和电感,其中单片机in+引脚上拉r1到3.3v下拉r5到电源地,单片机in
‑
引脚上拉r2到3.3v下拉r6到电源地,引脚ben+上拉r3到3.3v下拉r7到电源地,引脚ben
‑
上拉r4到3.3v下拉r8到电源地,out+引脚接电阻r12,所述电阻r12与电阻r8和电容c3串联接地,d1负极接r11,r9和l1并联,d1正极与电感l1相连,所述电感l1另一端同时连接3.3v电源和c2,所述c2的另一端接电源地,激光二极管组分别与d1正极、r11和引脚md相连。
8.优选的,所述激光二极管组由两个led灯组成,一个led灯的正极与另外一个led灯的负极相连组成激光二极管组。
9.优选的,所述r1、r2、r3和r4为130ω的电阻,所述r5、r6、r7和r8为82ω的电阻,所述c1和c2为0.1uf的电容,所述l1为10nh的电感。
10.优选的,所述光束质量分析单元计算光束的光束质量因子x的计算公式为:
[0011][0012]
其中,d为光束束腰宽度,θ为远场发散角,ρ为基膜束腰宽度。
[0013]
优选的,所述远场发散角θ的计算公式为:
[0014][0015]
其中,λ为激光波长,d0为光束的束腰直径。
[0016]
优选的,所述距离计算单元包括系数校准单元和计算输出单元。
[0017]
优选的,所述系数校准单元的计算公式为:
[0018][0019]
其中,第一次计算距离参数时已知光束直径d1和距离l1,第二次计算距离参数时已知光束的直径d2和距离l2,第三次计算距离参数时已知光束直径d3和距离l3。
[0020]
优选的,所述计算输出单元计算距离s的计算公式为:
[0021]
s=ρ
·
d;
[0022]
其中,ρ为距离参数,d为光束直径。
[0023]
优选的,所述距离计算单元的工作步骤为:
[0024]
步骤s1:已知距离l和已知直径d,计算三次距离参数;
[0025]
步骤s2:将三组距离参数取平均值,获取较为准确的参数ρ;
[0026]
步骤s3:根据光束直径与距离参数ρ计算距离s。
[0027]
与现有技术相比,本发明的有益效果是:本发明通过计算掌握随着距离变化激光的光束直径也会随着变化,掌握两者变化关系从而测量计算收和发位置的距离。
[0028]
本发明通过激光发射单元发射测距激光,测距激光通过一端距离的传播会有一定程度的发散,根据接收位置测量激光传播之后的光束直径。激光质量分析单元对光束进行分析,计算光束的质量因子,获取光束的束腰宽度、远扬发散角和基膜束腰宽度,方便直接通过激光质量分析单元获取激光传播之后的光束直径。
[0029]
对距离参数进行计算过程中,通过对已知距离的三组测算获取距离参数数值,再计算距离参数的平均值获取更为准确地距离参数,通过距离参数和光束直径再对距离进行准确计算。
[0030]
本发明在使用过程中避开了因光速速度太快从而导致测算激光传播时间误差较大这一因素,测量时间误差会在光速的影响下使得测量不准确。
附图说明
[0031]
图1为本发明整体结构示意图;
[0032]
图2为本发明中激光发射单元电路示意图;
[0033]
图3为本发明中系统工作流程图;
[0034]
图4为本发明中距离计算单元结构示意图;
[0035]
图5为本发明中距离计算单元工作流程图。
[0036]
图中:1激光发射单元、2光束质量分析单元、3距离计算单元、301系数校准单元、302计算输出单元。
具体实施方式
[0037]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0038]
请参阅图1
‑
5,本发明提供一种技术方案:
[0039]
一种基于光束直径变化的激光测距系统,包括激光发射单元1、光束质量分析单元2和距离计算单元3,激光发射单元1用于发射测距激光,光束质量分析单元2用于分析光束的光束质量因子,距离计算单元3用于通过光束的直径计算激光发射位置与接收位置之间的距离。
[0040]
本发明中,激光发射单元1包括单片机、激光二极管组、电容、电阻、二极管和电感,其中单片机in+引脚上拉r1到3.3v下拉r5到电源地,单片机in
‑
引脚上拉r2到3.3v下拉r6到电源地,引脚ben+上拉r3到3.3v下拉r7到电源地,引脚ben
‑
上拉r4到3.3v下拉r8到电源地,out+引脚接电阻r12,所述电阻r12与电阻r8和电容c3串联接地,d1负极接r11,r9和l1并联,d1正极与电感l1相连,所述电感l1另一端同时连接3.3v电源和c2,所述c2的另一端接电源地,激光二极管组分别与d1正极、r11和引脚md相连。激光二极管组由两个led灯组成,一个led灯的正极与另外一个led灯的负极相连组成激光二极管组。r1、r2、r3和r4为130ω的电阻,所述r5、r6、r7和r8为82ω的电阻,c1和c2为0.1uf的电容,所述l1为10nh的电感。
[0041]
max3656为突发模式激光驱动器,工作在数据速率155mbps至2.5gbps。激光驱动器允许正射极耦合逻辑或电流模式逻辑数据输入,并为激光二极管提供偏置电流和调制电流。器件可在小于2ns的时间内将激光二极管由完全不能通信状态转换到全通信状态。max3656激光驱动器和激光二极管之间直流耦合,工作于最低至+3.0v单电源电压。数字自动功率控制(apc)环可使平均光功率在整个温度范围和工作寿命内保持恒定。apc环可在576ns最小突发开通时间和96ns最小突发关断时间条件下工作;最大突发开通或关断时间没有限制。失效监视器用来指示apc环不能再保持平均功率不变。将突发使能端(ben)接到高电平,max3656就能够用在非突发模式系统(连续模式)中。为节省功率,max3656提供使能和禁止功能。调制电流设置范围:10ma至85ma;偏置电流设置范围:1ma至70ma。通过高速数字电路直接发射脉冲激光,并且能够通过输入信号自动调节发射功率。驱动电流的各项产生可以根据需要简单的通过设置不同的电阻进行编程,设计简便。max3656构成的驱动电源电路运行稳定可靠。
[0042]
除此之外,光束质量分析单元2计算光束的光束质量因子x的计算公式为:
[0043][0044]
其中,d为光束束腰宽度,θ为远场发散角,ρ为基膜束腰宽度。远场发散角θ的计算公式为:
[0045][0046]
其中,λ为激光波长,d0为光束的束腰直径。激光发射单元发射测距激光,测距激光通过一端距离的传播会有一定程度的发散,根据接收位置测量激光传播之后的光束直径。激光质量分析单元2对光束进行分析,计算光束的质量因子,获取光束的束腰宽度、远扬发散角和基膜束腰宽度,方便直接通过激光质量分析单元获取激光传播之后的光束直径。激光质量分析单元2可通过激光质量分析仪直接对接收到的激光进行分析,从激光质量分析仪直接读出激光光束的直径用来计算距离s。
[0047]
距离计算单元3包括系数校准单元301和计算输出单元302。系数校准单元301的计算公式为:
[0048][0049]
其中,第一次计算距离参数时已知光束直径d1和距离l1,第二次计算距离参数时已知光束的直径d2和距离l2,第三次计算距离参数时已知光束直径d3和距离l3。计算输出单元302计算距离s的计算公式为:
[0050]
s=ρ
·
d;
[0051]
其中,ρ为距离参数,d为光束直径。
[0052]
距离计算单元(3)的工作步骤为:
[0053]
步骤s1:已知距离l和已知直径d,计算三次距离参数;
[0054]
步骤s2:将三组距离参数取平均值,获取较为准确的参数ρ;
[0055]
步骤s3:根据光束直径与距离参数ρ计算距离s。
[0056]
在计算距离s之前需要对距离参数ρ进行计算,计算距离参数ρ通过三组已知距离的测距来计算验证,再求取距离参数ρ的平均值,使得计算得到的距离参数ρ的数值更加准确。在计算获取了距离参数ρ的数值之后再通过对光束直径进行测量计算就可以得到距离值,通过公式s=ρ
·
d来计算距离s的数值。
[0057]
本发明的具体工作流程为:使用时,先是通过激光发射单元1发射测距激光。测距激光通过一端距离的传播会有一定程度的发散,激光质量分析单元2在接收激光的位置,激光质量分析单元2根据接收位置测量激光传播之后的光束直径。激光质量分析单元2对光束进行分析,计算光束的质量因子,获取光束的束腰宽度、远扬发散角和基膜束腰宽度,方便直接通过激光质量分析单元获取激光传播之后的光束直径。在测得光束直径之后,再通过已知距离的三组测算获取距离参数数值,再计算距离参数的平均值获取更为准确地距离参数。获取了距离参数可以通过计算公式计算激光发射位置与接收位置之间的距离s,可以通过平行移动激光发射单元1与接收位置来计算多组距离s,再求取距离平均值,获取更为准确地距离s。
[0058]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1