一种海洋工程用海洋水质与生态要素监测机器人的制作方法
[0001]
本发明涉及一种检测机器人,具体为一种海洋工程用海洋水质与生态要素监测机器人,属于水质与生态要素监测技术领域。
背景技术:
[0002]
21世纪将成为海洋世纪,海洋将成为人类探索和开发的重要领域。对海洋环境的了解在开发海洋和保卫海洋中起着基础性的作用。海洋中的风、浪、流环境以及温度和盐度的分布规律等环境水文信息对于海洋渔业、海洋运输和海洋矿业开发等具有重要意义。
技术实现要素:
[0003]
本发明的目的在于提供一种海洋工程用海洋水质与生态要素监测机器人。
[0004]
本发明的目的可以通过以下技术方案实现:
[0005]
一种海洋工程用海洋水质与生态要素监测机器人,包括机器人本体、路径规划模块、运动控制模块、数据管理模块以及水质预警模块;所述数据管理模块与机器人本体直接线性连接,所述数据管理模块包括数据采集单元、数据处理单元以及数据存储单元;所述路径规划模块以及运动控制模块与机器人本体无线通信连接,所述运动控制模块包括自主控制单元以及人工控制单元,所述自主控制单元安装于机器人本体内部;
[0006]
所述数据采集单元用于采集海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据,并将采集到的盐度、温度、叶绿素浓度以及洋流大小数据发送至数据处理单元,数据处理单元根据采集的数据进行去量纲取其数值,计算出环境影响因素,当环境影响因素超过设定的环境影响因素阈值时,数据管理模块发送预警信号至水质预警模块进行海洋水下环境进行预警;
[0007]
所述路径规划模块用于对机器人本体进行运动线路规划,路径规划模块将规划的运动路线发送至机器人本体后,运动控制模块驱动机器人本体进行运动,数据管理模块的数据采集单元实时获取机器人的实时位置信息,并将位置信息与路径规划模块的运动线路进行比较。
[0008]
优选的,所述数据处理单元用于对数据采集单元采集的数据进行处理,具体的处理过程前还包括以下位置匹配过程:
[0009]
运动控制模块按照路径规划模块规划的运动路线,将机器人本体驱动至指定位置;
[0010]
数据采集单元获取机器人本体悬停的位置信息,并将获取的位置信息发送至路径规划模块,路径规划模块对获取的位置信息与路径规划模块规划的指定位置进行位置匹配,匹配成功发送数据采集信号至数据管理模块;
[0011]
数据管理模块控制数据采集单元进行数据采集。
[0012]
优选的,所述数据处理单元用于对数据采集单元采集的数据进行处理,具体的处理过程包括以下:
[0013]
数据管理模块接收到匹配成功指令后,控制数据采集单元进行数据采集;
[0014]
获取当前位置的海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据,并将海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据发送至数据处理单元;
[0015]
数据处理单元分别将海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据进行去量纲取其数值,并标记为:yi、ti、li、di;
[0016]
数据处理单元从数据存储单元中调取用于计算环境影响因素hi的公式,计算公式为其中α、β、γ、χ为预设比例系数固定值;
[0017]
数据处理单元设定环境影响因素阈值,当环境影响因素hi大于环境影响因素阈值时,数据处理单元发送一级预警指令至水质预警模块;并设置采集周期t,在周期t后对当前水域进行二次采集。
[0018]
优选的,二次采集的过程包括以下:
[0019]
t周期后,二次获取当前位置的海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据,并将海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据发送至数据处理单元;
[0020]
数据处理单元分别将海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据进行去量纲取其数值,并标记为:yi
′
、ti
′
、li
′
、di
′
;
[0021]
数据处理单元从数据存储单元中调取用于计算环境影响因素hi
′
的公式,计算公式为
[0022]
当二次获取的环境影响因素hi
′
大于一次获取的环境影响因素hi,则数据处理单元发送二级预警指令至水质预警模块;当二次获取的环境影响因素hi
′
小于一次获取的环境影响因素hi且大于环境影响因素阈值时,则数据处理单元发送一级预警指令至水质预警模块;当二次获取的环境影响因素hi
′
小于环境影响因素阈值时,则不发送预警指令。
[0023]
与现有技术相比,本发明的有益效果是:
[0024]
1、数据采集单元用于采集海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据,并将采集到的盐度、温度、叶绿素浓度以及洋流大小数据发送至数据处理单元,数据处理单元根据采集的数据进行去量纲取其数值,计算出环境影响因素,当环境影响因素超过设定的环境影响因素阈值时,数据管理模块发送预警信号至水质预警模块进行海洋水下环境进行预警;路径规划模块用于对机器人本体进行运动线路规划,路径规划模块将规划的运动路线发送至机器人本体后,运动控制模块驱动机器人本体进行运动,数据管理模块的数据采集单元实时获取机器人的实时位置信息,并将位置信息与路径规划模块的运动线路进行比较。
[0025]
2、数据管理模块接收到匹配成功指令后,控制数据采集单元进行数据采集;获取当前位置的海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据,并将海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据发送至数据处理单元;数据处理单元分别将海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据进行去量纲取其数值,并标记为:yi、ti、li、di;数据处理单元从数据存储单元中调取用于计算环境影响因素hi的公式,计算公式为
数据处理单元设定环境影响因素阈值,当环境影响因素hi大于环境影响因素阈值时,数据处理单元发送一级预警指令至水质预警模块。
[0026]
3、数据处理单元用于对数据采集单元采集的数据进行处理,运动控制模块按照路径规划模块规划的运动路线,将机器人本体驱动至指定位置;数据采集单元获取机器人本体悬停的位置信息,并将获取的位置信息发送至路径规划模块,路径规划模块对获取的位置信息与路径规划模块规划的指定位置进行位置匹配,匹配成功发送数据采集信号至数据管理模块;数据管理模块控制数据采集单元进行数据采集。
[0027]
4、一次采集后还包括二次采集过程,二次采集的数据与一次采集的数据进行比较与对比,通过计算出的环境影响因素判断水质是恶化还是改善。当二次获取的环境影响因素hi
′
大于一次获取的环境影响因素hi,则数据处理单元发送二级预警指令至水质预警模块;当二次获取的环境影响因素hi
′
小于一次获取的环境影响因素hi且大于环境影响因素阈值时,则数据处理单元发送一级预警指令至水质预警模块;当二次获取的环境影响因素hi
′
小于环境影响因素阈值时,则不发送预警指令。
附图说明
[0028]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0029]
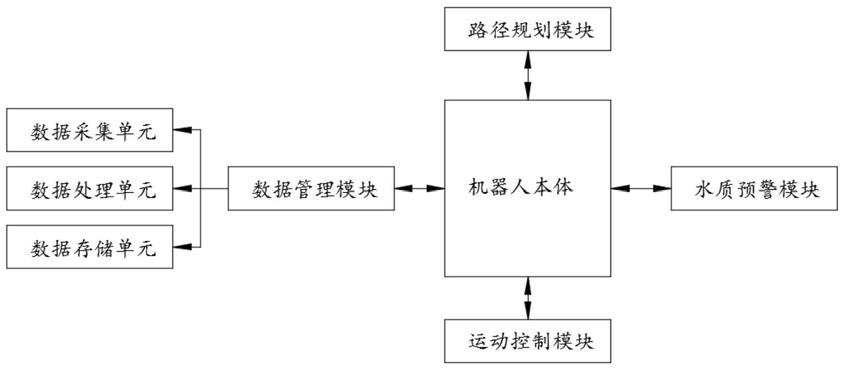
图1为本发明的原理框图。
具体实施方式
[0030]
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0031]
请参阅图1所示,一种海洋工程用海洋水质与生态要素监测机器人,包括机器人本体、路径规划模块、运动控制模块、数据管理模块以及水质预警模块;所述数据管理模块与机器人本体直接线性连接,所述数据管理模块包括数据采集单元、数据处理单元以及数据存储单元;所述路径规划模块以及运动控制模块与机器人本体无线通信连接,所述运动控制模块包括自主控制单元以及人工控制单元,所述自主控制单元安装于机器人本体内部;
[0032]
所述数据采集单元用于采集海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据,并将采集到的盐度、温度、叶绿素浓度以及洋流大小数据发送至数据处理单元,数据处理单元根据采集的数据进行去量纲取其数值,计算出环境影响因素,当环境影响因素超过设定的环境影响因素阈值时,数据管理模块发送预警信号至水质预警模块进行海洋水下环境进行预警;
[0033]
所述路径规划模块用于对机器人本体进行运动线路规划,路径规划模块将规划的
运动路线发送至机器人本体后,运动控制模块驱动机器人本体进行运动,数据管理模块的数据采集单元实时获取机器人的实时位置信息,并将位置信息与路径规划模块的运动线路进行比较。
[0034]
其中,所述数据处理单元用于对数据采集单元采集的数据进行处理,具体的处理过程前还包括以下位置匹配过程:
[0035]
运动控制模块按照路径规划模块规划的运动路线,将机器人本体驱动至指定位置;
[0036]
数据采集单元获取机器人本体悬停的位置信息,并将获取的位置信息发送至路径规划模块,路径规划模块对获取的位置信息与路径规划模块规划的指定位置进行位置匹配,匹配成功发送数据采集信号至数据管理模块;
[0037]
数据管理模块控制数据采集单元进行数据采集。
[0038]
其中,所述数据处理单元用于对数据采集单元采集的数据进行处理,具体的处理过程包括以下:
[0039]
数据管理模块接收到匹配成功指令后,控制数据采集单元进行数据采集;
[0040]
获取当前位置的海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据,并将海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据发送至数据处理单元;
[0041]
数据处理单元分别将海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据进行去量纲取其数值,并标记为:yi、ti、li、di;
[0042]
数据处理单元从数据存储单元中调取用于计算环境影响因素hi的公式,计算公式为其中α、β、γ、χ为预设比例系数固定值;
[0043]
数据处理单元设定环境影响因素阈值,当环境影响因素hi大于环境影响因素阈值时,数据处理单元发送一级预警指令至水质预警模块;并设置采集周期t,在周期t后对当前水域进行二次采集。
[0044]
其中,二次采集的过程包括以下:
[0045]
t周期后,二次获取当前位置的海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据,并将海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据发送至数据处理单元;
[0046]
数据处理单元分别将海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据进行去量纲取其数值,并标记为:yi
′
、ti
′
、li
′
、di
′
;
[0047]
数据处理单元从数据存储单元中调取用于计算环境影响因素hi
′
的公式,计算公式为
[0048]
当二次获取的环境影响因素hi
′
大于一次获取的环境影响因素hi,则数据处理单元发送二级预警指令至水质预警模块;当二次获取的环境影响因素hi
′
小于一次获取的环境影响因素hi且大于环境影响因素阈值时,则数据处理单元发送一级预警指令至水质预警模块;当二次获取的环境影响因素hi
′
小于环境影响因素阈值时,则不发送预警指令。
[0049]
上述公式均是去量化取其数值计算,公式是由采集大量数据进行软件模拟得到最近真实情况的一个公式,公式中的预设参数由本领域的技术人员根据实际情况设定。
[0050]
本发明的工作原理:数据采集单元用于采集海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据,并将采集到的盐度、温度、叶绿素浓度以及洋流大小数据发送至数据处理单元,数据处理单元根据采集的数据进行去量纲取其数值,计算出环境影响因素,当环境影响因素超过设定的环境影响因素阈值时,数据管理模块发送预警信号至水质预警模块进行海洋水下环境进行预警;路径规划模块用于对机器人本体进行运动线路规划,路径规划模块将规划的运动路线发送至机器人本体后,运动控制模块驱动机器人本体进行运动,数据管理模块的数据采集单元实时获取机器人的实时位置信息,并将位置信息与路径规划模块的运动线路进行比较。数据管理模块接收到匹配成功指令后,控制数据采集单元进行数据采集;获取当前位置的海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据,并将海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据发送至数据处理单元;数据处理单元分别将海洋水下的盐度、温度、叶绿素浓度以及洋流大小数据进行去量纲取其数值,并标记为:yi、ti、li、di;数据处理单元从数据存储单元中调取用于计算环境影响因素hi的公式,计算公式为数据处理单元设定环境影响因素阈值,当环境影响因素hi大于环境影响因素阈值时,数据处理单元发送一级预警指令至水质预警模块。
[0051]
数据处理单元用于对数据采集单元采集的数据进行处理,运动控制模块按照路径规划模块规划的运动路线,将机器人本体驱动至指定位置;数据采集单元获取机器人本体悬停的位置信息,并将获取的位置信息发送至路径规划模块,路径规划模块对获取的位置信息与路径规划模块规划的指定位置进行位置匹配,匹配成功发送数据采集信号至数据管理模块;数据管理模块控制数据采集单元进行数据采集。一次采集后还包括二次采集过程,二次采集的数据与一次采集的数据进行比较与对比,通过计算出的环境影响因素判断水质是恶化还是改善。当二次获取的环境影响因素hi
′
大于一次获取的环境影响因素hi,则数据处理单元发送二级预警指令至水质预警模块;当二次获取的环境影响因素hi
′
小于一次获取的环境影响因素hi且大于环境影响因素阈值时,则数据处理单元发送一级预警指令至水质预警模块;当二次获取的环境影响因素hi
′
小于环境影响因素阈值时,则不发送预警指令。
[0052]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0053]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1