一种数字化三轴TMR磁传感系统
一种数字化三轴tmr磁传感系统
技术领域
1.本发明涉及一种数字化三轴tmr磁传感系统,特别是一种基于正交锁相放大的数字化三轴tmr磁传感系统,属于磁传感器系统设计领域。
背景技术:
2.三轴磁传感器能将三维磁场信号转换为电信号,从而测出外界三维磁场量,在工业、医疗、军事以及航天航空等领域有广泛应用。隧穿式磁阻(tunnel magnetoresistance,tmr)传感器相比其他传统磁阻传感器有着灵敏度高、功耗小、动态范围大、电阻率高以及稳定性好等优势,具有广阔的应用前景。
3.tmr磁阻传感器的缺点在于低频信号输出噪声太大。其主要噪声类型为1/f噪声,即信号频率越低、受噪声影响越大,从而导致tmr传感器电路系统对低频噪声抑制要求非常严苛。传统的解决方式为通过硬件调制的方式将低频噪声调制到高频进而滤除,这种方式的缺点在于结构复杂、工艺水平要求高。
4.正交锁相放大技术是由传统锁相放大技术改善而来的一种适用于微弱信号检测的方法,它根据相关检测原理滤除噪声,可以极大地改善微弱信号的信噪比。正交锁相放大技术解决了传统锁相放大技术对参考信号与被测有用信号的相位差有着严格的要求这一缺陷,还可以同时检测出被测信号的幅值和相位信息。
5.鉴于此,一种基于正交锁相放大的数字化三轴tmr磁传感器设计将传统数字锁相放大处理中的信号调制环节数字化,并配合信号调理模块实现了正交锁相功能,有利于三轴tmr磁传感器传感电路结构的简化与系统小型化,还能方便地开发出不同的信号调理算法。
技术实现要素:
6.针对上述现有技术,本发明要解决的技术问题是提供一种基于正交锁相放大的数字化三轴tmr磁传感系统,实现一种数字化、结构简单、高信噪比以及易于信号调理算法设计的数字化三轴tmr磁传感系统。
7.为解决上述技术问题,本发明的一种数字化三轴tmr磁传感系统,包括三路结构相同的单轴传感结构,三路电单轴传感结构分别处理x轴、y轴和z轴的磁信号;所述电路结构包括:单通道磁电阻平衡桥电路、差分放大模块、抗混叠低通滤波模块、a/d转换模块和微处理器;单通道tmr磁电阻平衡桥电路将被测的低频磁场信号转换为电压信号,电压信号经过差分放大模块进行差分放大;差分放大后的信号输入至抗混叠低通滤波模块滤除信号频率高于a/d转换模块半采样率的信号;抗混叠低通滤波模块输出信号输入至a/d转换模块得到被测数字信号,数字信号输入至微处理器,微处理器执行正交锁相解调算法输出传感结果。
8.本发明还包括:
9.1.微处理器执行正交锁相解调算法输出传感结果具体为:
10.步骤1:生成频率大于被测信号频率的两路正交正弦参考信号和余弦参考信号,ω
为被测信号的频率,ω
p
为参考信号的频率,ω
p
≥1000ω;
11.步骤2:将a/d转换模块输出的被测数字信号与余弦参考信号进行乘积运算,得到与被测信号频率和参考信号频率对应的和频信号与差频信号;
12.步骤3:将和频信号滤除,保留差频信号;
13.步骤4:差频信号分别和正弦参考信号和余弦参考信号做乘法运算,得到两路乘法运算结果;
14.步骤5:对步骤4得到的两路乘法运算结果分别进行低通滤波,滤除高频信号;
15.步骤6:对步骤5得到的两路信号进行幅值相位计算,得到被测信号的幅值与相位。
16.2.步骤1中正弦参考信号和余弦参考信号分别为和r
c
(t)=bcos(ω
p
t),其中ω
p
为参考信号的频率,b为参考信号的幅值。
17.3.步骤2中被测数字信号具体为:x(t)=akcos(ωt+θ)+n(t),其中a为被测信号的幅值,ω为被测信号的频率,θ为被测信号的初始相位,k代表差分放大器的放大倍数,n(t)代表测量噪声。
18.4.步骤2中将a/d转换模块输出的被测数字信号与余弦参考信号进行乘积运算得到结果为:
[0019][0020]
其中,频率为ω+ω
p
的项为和频信号项,频率为ω
‑
ω
p
的项为差频信号项。
[0021]
5.步骤4中两路乘法运算结果具体为:差频信号与正弦参考信号相乘结果为:
[0022][0023]
差频信号与余弦参考信号相乘结果为:
[0024][0025]
6.步骤5中对步骤4得到的两路乘法运算结果分别进行低通滤波,滤除高频信号得到的信号满足:
[0026]
v2(t)信号经低通滤波模块后的输出信号表达式为
[0027]
v3(t)信号经低通滤波模块后的输出信号表达式为
[0028]
7.步骤6中被测信号的幅值具体为:被测信号的相位为ωt+θ=arctan2(v
s
(t),v
c
(t)),其中atan2(
·
,
·
)为四象限的反正切函数。
[0029]
本发明的有益效果:与现有技术相比,本发明具有以下有益效果:
[0030]
1.本发明克服了传统数字锁相放大器要求参考路信号必须与被测有效信号同相位的条件,也不需要知道被测有效信号的准确频率。
[0031]
2.本发明将传统数字锁相放大处理中的信号调制环节数字化,并配合信号调理模
块实现了正交锁相功能。
[0032]
3.本发明可以同时检测出磁场信号的幅值和相位。
[0033]
4.本发明实现了正交锁相放大处理方法的完全数字化,有利三轴tmr磁传感器传感电路结构的简化与小型化,也便于开发出不同的信号调理算法。
附图说明
[0034]
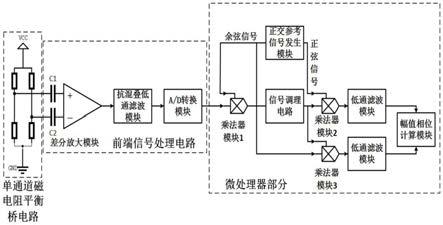
图1为本发明的数字化三轴tmr磁传感系统的结构方框图;
[0035]
图2为本发明的数字化三轴tmr磁传感系统的单轴设计方框图。
具体实施方式
[0036]
下面结合附图对本发明具体实施方式做进一步说明。
[0037]
本发明的一种基于正交锁相放大的数字化三轴tmr磁传感系统,其实质为三个感应不同维度方向上磁场变化的三通道tmr磁传感器表头和三组完全一致的磁场信号前端处理电路系统构成的传感器。由于三轴tmr磁传感器设计的三轴对称性,其单轴设计具有代表性。本发明涉及一种基于正交锁相放大的数字化三轴tmr磁传感器的任一单轴系统(如图1所示)包括:单通道tmr磁电阻平衡桥电路,差分放大模块,抗混叠低通滤波模块,a/d转换模块,正交参考信号发生模块,信号调理模块,幅值相位计算模块,三个乘法器模块,两个低通滤波模块。差分放大模块将磁电阻平衡桥电路输出的差分信号进行预放大到合适幅值,再经过一个抗混叠低通滤波模块滤除高于a/d转换模块半采样频率的频率成分。a/d转换模块将被测信号转换为数字信号输入微处理器内。正交参考信号发生模块产生频率远大于被测信号频率的两路正交正弦参考信号和余弦参考信号。将a/d转换模块输出的数字被测信号与余弦参考信号输入到乘法器模块1进行乘积运算,产生由被测信号频率与参考信号频率对应的和频信号与差频信号两部分。在信号调理模块部分将和频部分滤除,保留差频部分。将差频信号输入到乘法器模块2和正弦参考信号做乘法运算,同时输入到乘法器模块3和余弦参考信号做乘法运算,再分别将两路乘法器模块的输出信号接入两个低通滤波模块,滤除它们的高频部分。最后,将两路低通滤波模块输出的信号输入到幅值相位计算模块,得到被测信号的幅值与相位。本发明克服了传统数字锁相放大器要求参考信号必须与被测有效信号同相位的条件,也不需要知道被测有效信号的准确频率。本发明将传统数字锁相放大处理方法的信号调制环节数字化,并配合信号调理模块实现了正交锁相功能,可以同时检测出磁场信号的幅值和相位。本发明实现了正交锁相放大处理方法的完全数字化,有利于三轴tmr磁传感器传感电路结构的简化与小型化,也便于开发出不同的信号调理算法。
[0038]
本发明的一种基于正交锁相放大的数字化三轴tmr磁传感系统具体包括:
[0039]
s1、对被测信号通过前端信号处理电路进行预处理,具体包括:将单通道tmr磁电阻平衡桥电路输出信号进行差分放大;将差分放大后的信号通入抗混叠低通滤波器滤除信号频率高于a/d转换模块半采样率的部分;将抗混叠低通滤波器的输出信号输入a/d转换模块得到数字化的被测信号,并将所得数字化被测信号输入到微处理器。
[0040]
s2、正交参考信号发生模块产生频率远大于被测信号频率的相位正交的正弦和余弦两路参考信号。
[0041]
s3、将s1步骤输出的数字信号与余弦参考信号输入到乘法器模块1进行乘法运算,
将产生由被测信号频率与参考信号频率对应的和频信号与差频信号两部分。
[0042]
s4、将s3步骤输出的信号经信号调理模块滤除和频信号部分,保留差频信号部分。
[0043]
s5、将s4步骤输出的差频信号输入乘法器模块2和正弦参考信号做乘法运算,同时也输入乘法器模块3和余弦参考信号做乘法运算。
[0044]
s6、将s5步骤输出的两路乘法器模块输出信号分别接入两个低通滤波模块,滤除高频信号。
[0045]
s7、将s6步骤输出的两路低通滤波模块信号输出接入到幅值相位计算模块,得到被测有效信号的幅值与相位信息。
[0046]
其中步骤s2
‑
s7完全是由微处理器中的数字化运算加以实现。
[0047]
s1步骤中的被测信号经a/d转换模块输出后的表示式为x(t)=akcos(ωt+θ)+n(t),其中a为被测有效信号的幅值,ω为被测有效信号的频率,θ为被测有效信号的初始相位,k代表前端信号处理电路中差分放大器的放大倍数,n(t)代表信号的测量噪声。
[0048]
s2步骤中正交参考信号发生模块产生的两路正交信号表达式分别为:余弦信号表达式r
c
(t)=bcos(ω
p
t),正弦信号表达式其中ω
p
为远大于被测信号频率ω的两路正交参考信号的频率,b为参考信号的幅值。
[0049]
s3步骤中所述的将数字化的被测信号与余弦信号同时输入到乘法器模块运算后,得到乘法器输出信号的表达式为:其中频率为ω+ω
p
的项为和频信号项,频率为ω
‑
ω
p
的项为差频信号项。
[0050]
s4步骤中所述的将s3步骤输出的v
b
(t)信号经过信号调理电路,以滤除和频信号和通频带以外的噪声信号,保留差频信号进行输出。
[0051]
s5步骤中所述的将s4步骤输出差频信号项表达式为同时输入到乘法器模块2和乘法器模块3,分别与正交参考信号模块输出的正弦信号和余弦信号做乘法运算。乘法器模块2输出信号的表达式为乘法器模块3输出信号的表达式为
[0052]
s6步骤中所述的将s5步骤中两个乘法器模块的输出信号v2(t)和v3(t)分别经相应的低通滤波器以滤除其高频成分,则v2(t)信号经低通滤波模块后的输出信号表达式为v3(t)信号经低通滤波模块后的输出信号表达式为
[0053]
s7步骤中所述的将s6步骤输出信号v
c
(t)和v
s
(t)同时输入到幅值相位计算模块,
则得到被测信号的幅值为被测有效信号的相位为ωt+θ=arctan2(v
s
(t),v
c
(t)),其中arctan2(
·
,
·
)函数是输出结果为四象限范围的反正切函数。
[0054]
该数字化三轴tmr传感器的单轴电路设计具体包括单通道tmr磁电阻平衡桥电路、差分放大电路、抗混叠低通滤波电路、a/d转换电路以及微处理器电路这几个部分;所述的单通道tmr磁电阻平衡桥电路的输出端与差分放大电路输入端进行连接,抗混叠低通滤波电路的输入端与差分放大电路的输出端进行连接、差分放大电路的输出端再与a/d转换电路输入端进行连接,微处理器的输入端与a/d转换电路的输出端进行连接;所述的单通道tmr磁电阻平衡桥电路用于将被测的低频磁场信号转换为电压信号;所述的差分放大电路用于将平衡桥电路输出的电压信号放大至合适幅值;所述的抗混叠低通滤波电路用于滤除输入信号中频率大于a/d转换模块半采样频率的成分;所述的a/d转换电路用于将模拟电压信号转换为数字信号;所述的微处理器用于实现正交锁相解调算法。
[0055]
该数字化三轴数字tmr传感器的传感电路由三路完全一致电路结构组成,以实现三维磁场信号的同步处理。
[0056]
结合图1,本发明的实施例提供了一种基于正交锁相放大的数字化三轴tmr磁传感器,包括三通道tmr磁电阻平衡桥电路、三路完全一致的前端信号处理电路以及实现正交锁相解调算法功能的微处理器部分。
[0057]
如图2所示,本发明的实施例提供了一种基于正交锁相放大的数字化三轴tmr磁传感器,其单轴设计包括单通道tmr磁电阻平衡桥电路、差分放大电路、抗混叠低通滤波电路、a/d转换电路以及微处理器电路这几个部分;首先单通道tmr磁电阻平衡桥电路输出的被测信号通过差分放大电路、抗混叠低通滤波电路以及a/d转换电路,完成对信号的前端处理得到数字形式的被测有效信号;其次通过微处理器内部正交参考信号发生模块生成相位正交的两路参考信号,通过乘法器模块、低通滤波模块以及信号调理模块实现正交锁相解调算法功能;最后通过幅值相位计算模块得到被测有效信号的幅值与相位信息,以实现被测有效信号的检测与去噪。
[0058]
具体步骤如下:
[0059]
s1、对被测信号通过前端信号处理电路进行预处理,用于初步抑制噪声,提升信噪比;具体包括:将单通道tmr磁电阻平衡桥电路输出信号进行差分放大;通入抗混叠低通滤波器滤除频率高于a/d转换模块半采样率的成分以避免信号产生混叠而造成误差;将滤波器输出信号输入a/d转换模块通过过采样技术在降低量化噪声的同时得到数字信号,并将所得数字信号输入到微处理器。所述的被测信号经a/d转换模块输出后的表示式为x(t)=akcos(ωt+θ)+n(t),其中a为被测有效信号的幅值,ω为被测有效信号的频率,θ为被测有效信号的初始相位,k代表前端信号处理电路中差分放大器的放大倍数,n(t)代表测量噪声。
[0060]
s2、正交参考信号发生模块产生频率大于有效信号频率的相位正交的正弦信号和余弦信号。所述的正交参考信号发生模块产生的相位正交的两路参考信号表达式分别为:余弦参考信号表达式r
c
(t)=bcos(ω
p
t),正弦参考信号表达式其中ω
p
为远大于被测信号频率ω的两路正交参考信号的频率,b为参考信号的幅值。
[0061]
s3、将s1步骤输出的数字信号与余弦参考信号输入到乘法器模块1进行乘积运算,将产生由有效信号频率与参考信号频率组成的和频信号与差频信号两部分。所述的将数字化的被测信号与余弦信号输入到乘法器模块运算后信号表达式为:其中频率为ω+ω
p
的项为和频信号项,频率为ω
‑
ω
p
的项为差频信号项。
[0062]
s4、将s3步骤输出的信号在信号调理模块部分将和频信号滤除,保留差频信号部分。所述的将s3步骤输出的v
b
(t)信号经过一个数字带通滤波器,以滤除和频信号项和通频带以外的噪声信号,保留差频信号项进行输出。
[0063]
s5、将s4步骤输出的差频信号与正交参考信号模块输出的正弦信号一起输入到乘法器模块2做乘法运算,同时它与正交参考信号模块输出的余弦信号一起输入到乘法器模块3做乘法运算。所述的s4步骤输出的差频信号项表达式为乘法器模块2输出信号的表达式为:乘法器模块3输出信号的表达式为
[0064]
s6、将s5步骤输出的两路乘法器模块输出信号分别接入两个低通滤波模块,滤除它们中的高频信号。所述的将s5步骤中两个乘法器模块输出信号v2(t)和v3(t)分别经相应的低通滤波器以滤除其高频成分,则v2(t)信号经低通滤波模块后的输出信号表达式为v3(t)信号经低通滤波模块后的输出信号表达式为
[0065]
s7、将s6步骤的两路低通滤波模块的输出信号同时输入到幅值相位计算模块,得到被测有效信号的幅值与相位信息。所述的将s6步骤输出信号v
c
(t)和v
s
(t)同时输入到幅值相位计算模块,则得到被测信号的幅值为被测信号的相位为ωt+θ=arctan2(v
s
(t),v
c
(t)),其中arctan2(
·
,
·
)为四象限的反正切函数。
[0066]
该三轴tmr数字化传感器的单轴电路包括单通道tmr磁电阻平衡桥电路、差分放大电路、抗混叠低通滤波电路、a/d转换电路以及微处理器电路这几个部分;所述的单通道tmr磁电阻平衡桥电路的输出端与差分放大电路输入端进行连接,抗混叠低通滤波电路的输入端与差分放大电路的输出端进行连接,差分放大电路的输出端再与a/d转换电路输入端进行连接,微处理器的输入端与a/d转换电路的输出端进行连接;所述的单通道tmr磁电阻平衡桥电路用于将被测的低频磁场信号转换为电压信号;所述的差分放大电路用于将平衡桥电路输出的被测电压信号放大至合适幅值;所述的抗混叠低通滤波电路用于滤除输入信号中频率大于a/d转换模块半采样频率成分;所述的a/d转换电路用于将模拟电压信号转换为
数字信号;所述的微处理器用于实现正交锁相解调算法。
[0067]
本发明克服了传统数字锁相放大器要求参考路信号必须与被测有效信号同相位的条件,也不需要知道被测有效信号的准确频率。本发明将传统数字锁相放大处理方法的信号调制环节数字化,并配合信号调理模块实现了正交锁相功能,可以同时检测出磁场信号的幅值和相位。本发明实现了正交锁相放大方法的完全数字化,有利于三轴tmr磁传感器传感电路结构的简化与小型化,也便于开发出不同的信号调理算法。
[0068]
本发明采用的微处理器既可以是dsp芯片也可以用fpga等芯片进行设计。
[0069]
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于具体的实施方式,上述的具体实施方式仅仅为示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明的宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1