同轴馈电一体化机载气象雷达的制作方法
1.本发明属于雷达技术领域,具体涉及一种机载气象雷达,可用于对气象云团和湍流等影响载机飞行安全的危险目标进行探测及定位。
背景技术:
2.机载气象雷达是各种飞机上必不可少的飞行安全保障设备,它能在载机飞行过程中实时探测载机前方航路上一定空域范围内的气象云团、湍流等气象目标和其他非气象目标的分布状况,并将探测到的目标的轮廓、方位、距离和气象云团的降雨量这些信息显示在显示器上,为机组人员提供危险气象条件预警等功能,现已广泛应用于航空领域。
3.目前,机载气象雷达按照结构形式可以划分为分体式机载气象雷达和一体化机载气象雷达。
4.分体式机载气象雷达,其主要特点是雷达由多个分机组成,通常包括天线及驱动器分机、收发分机、信号处理分机和控制盒。这种分体式机载气象雷达因为由多个分机组成,因而整机重量重,且分机之间需要较长的电缆或波导进行连接,雷达系统复杂,不便于维护安装。
5.一体化机载气象雷达,其主要特点是雷达由单个天线收发处理机组成,整机重量轻,雷达各部分仅需较短的机内电缆进行互联,雷达系统简单,便于维护安装。但由于现有一体化机载气象雷达,如美国honeywell公司的primus 440、660、880集成rta气象雷达,这些雷达均采用波导缝隙阵列天线,天线重,制作工艺复杂且成本较高,且波导缝隙阵列天线与雷达基座之间采用射频电缆直接相连的结构,该射频电缆在天线转动过程中受扭力作用会发生形变,降低了雷达的可靠性。
技术实现要素:
6.本发明的目的在于针对上述现有技术的不足,提出一种同轴馈电一体化机载气象雷达,以减小天线重量和制作成本,消除射频电缆在天线转动过程中受扭力发生形变的问题,提高雷达的可靠性。
7.为实现上述目的,本发明所述的同轴馈电一体化机载气象雷达,包括天线1、俯仰传动机构2、方位传动机构3和雷达基座4,天线1通过俯仰传动机构2与方位传动机构3相连,并与雷达基座4之间通过射频电缆进行电气连接,方位传动机构3安装在雷达基座4上,该俯仰传动机构2,包括俯仰电机21、俯仰传动齿轮22、俯仰角传感器23和俯仰支架24,该方位传动机构3,包括方位电机31、方位传动齿轮32、方位角传感器33和方位支架34,其特征在于:
8.所述天线1,采用微带天线,以有效减小天线的重量和制作成本;
9.所述俯仰传动机构2,中增设有俯仰同轴旋转关节25,用于消除天线1在俯仰方向旋转时射频电缆受到的扭力;
10.所述方位传动机构3中增设有方位同轴旋转关节35,用于消除天线1和俯仰支架(24)在方位方向旋转时射频电缆受到的扭力。
11.进一步,所述天线1与俯仰传动机构2之间通过同轴盲插接口直接连接,以减少射频馈线的长度,降低雷达系统损耗;
12.进一步,所述俯仰同轴旋转关节25的旋转部分和俯仰电机21、俯仰传动齿轮22、俯仰角传感器23均安装在俯仰支架24上,并与天线1通过射频电缆进行电气连接;俯仰同轴旋转关节25的非旋转部分安装在方位传动机构3上,并与方位传动机构3通过射频电缆进行电气连接,当俯仰支架24带动天线1在俯仰方向转动时,使得俯仰同轴旋转关节25的旋转部分与天线1之间的射频电缆和俯仰同轴旋转关节25的非旋转部分与方位传动机构3之间的射频电缆均不受扭力作用,而避免射频电缆发生形变。
13.进一步,所述方位同轴旋转关节35的旋转部分和方位电机31、方位传动齿轮32、方位角传感器33均安装在方位支架34上,并与俯仰传动机构2通过射频电缆进行电气连接;方位同轴旋转关节35的非旋转部分安装在雷达基座4上,并与该雷达基座4通过射频电缆进行电气连接,当方位支架34带动俯仰传动机构2和天线1在方位方向转动时,使得方位同轴旋转关节35的旋转部分与俯仰传动机构2之间的射频电缆和方位同轴旋转关节35的非旋转部分与雷达基座4之间的射频电缆均不受扭力作用,而避免射频电缆发生形变。
14.进一步,所述雷达基座4采用腔体结构,其内设有包括接口板41、信号处理板42、双轴伺服驱动器43和x波段集成收发组件44;
15.该接口板41以fpga为处理核心,通过接收外部输入产生工作模式指令并传输给信号处理板42和双轴伺服驱动器43;
16.该信号处理板42以xilinx zynq系列soc为处理核心,用于接收接口板41传输的工作模式指令和x波段集成收发组件44传输的中频信号,并依次进行采样量化、数字下变频、脉冲压缩、脉冲积累和目标检测处理,产生视频编码告警数据传输给接口板41;
17.该双轴伺服驱动器43以dsp为处理核心,通过接收接口板41的工作模式指令,同时实现对俯仰电机21、方位电机31的伺服控制。
18.本发明与现有技术相比,具有如下优点:
19.1.本发明由于采用微带天线取代波导缝隙阵列天线,有效减小了天线的重量和制作成本;
20.2.本发明由于在俯仰传动机构和方位传动机构中分别增加了同轴旋转关节,可消除天线在俯仰和方位方向上转动时射频电缆受扭力发生形变的问题,提高了雷达的可靠性。
附图说明
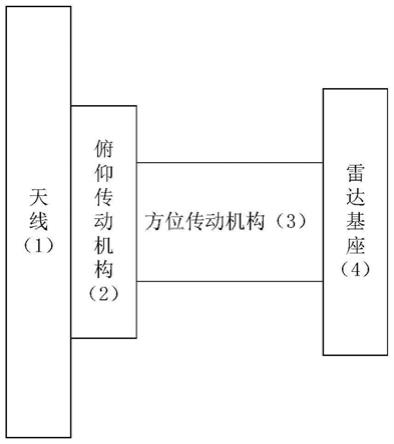
21.图1为本发明的整体结构框图;
22.图2为本发明中的俯仰传动机构结构框图;
23.图3为本发明中的方位传动机构结构框图;
24.图4为本发明中的雷达基座结构框图;
25.图5为本发明中的x波段集成收发组件框图;
26.图6为本发明中的信号处理框图。
具体实施方式
27.以下参照附图对本发明的实施例做作进一步详细描述。
28.参照图1,本发明的同轴馈电一体化机载气象雷达,包括天线1、俯仰传动机构2、方位传动机构3和雷达基座4,其中:
29.天线1安装在俯仰传动机构2上,用于定向发射俯仰传动机构2传输来的大功率射频发射信号,同时接收目标反射回来的射频回波信号并传输给俯仰传动机构2;由于该天线1与俯仰传动机构2之间通过同轴盲插接口直接连接,可减少射频馈线的长度,降低雷达系统损耗,同时由于该天线1采用微带天线取代现有一体化气象雷达采用的波导缝隙阵列天线,在和波导缝隙阵列天线具备相同增益的前提下,可有效降低天线的重量和制作成本。
30.俯仰传动机构2与方位传动机构3相连,用于带动天线1在俯仰方向上扫描;
31.方位传动机构3安装在雷达基座4上,用于带动天线1和俯仰传动机构2在方位方向上扫描。
32.雷达基座4用于接收外部输入,以产生射频发射信号传输给方位传动机构3,同时接收方位传动机构3传输来的射频回波信号、俯仰传动机构2传输来的俯仰反馈、方位传动机构3传输来的方位反馈,根据外部输入对射频回波信号依次进行混频滤波、采样量化、数字下变频、脉冲压缩、脉冲积累、目标检测和数据组包的处理分析,产生俯仰驱动信号并传输给俯仰传动机构2,产生方位驱动信号并传输给方位传动机构3,产生处理结果并输出。
33.参照图2,所述俯仰传动机构2,包括俯仰电机21、俯仰传动齿轮22、俯仰角传感器23、俯仰支架24和俯仰同轴旋转关节25,其中:
34.俯仰电机21,用于接收雷达基座4传来的俯仰驱动,通过俯仰传动齿轮22的传动带动天线1在俯仰方向上扫描;
35.俯仰角传感器23,为导塑电位器,其旋转轴与俯仰传动齿轮22的旋转轴相连,用于实时获取俯仰传动齿轮22的俯仰旋转角度,并将该俯仰旋转角度作为俯仰反馈传输给雷达基座4;
36.俯仰支架24,作为结构支撑,用于安装包括俯仰电机21、俯仰传动齿轮22、俯仰角传感器23和俯仰同轴旋转关节25;
37.俯仰旋转关节25,其旋转部分和俯仰电机21、俯仰传动齿轮22、俯仰角传感器23均安装在俯仰支架24上,并与天线1通过射频电缆进行电气连接;其非旋转部分安装在方位传动机构3上,并与方位传动机构3通过射频电缆进行电气连接,当俯仰支架24带动天线1在俯仰方向转动时,使得俯仰同轴旋转关节25的旋转部分与天线1之间的射频电缆和俯仰同轴旋转关节25的非旋转部分与方位传动机构3之间的射频电缆均不受扭力作用,而避免射频电缆发生形变,提高了雷达的可靠性。
38.参照图3,所述方位传动机构3,包括方位电机31、方位传动齿轮32、方位角传感器33、支架垫块34和方位同轴旋转关节35,其中:
39.方位电机31,用于接收雷达基座4传来的方位驱动,通过方位传动齿轮32的传动带动天线1和俯仰传动机构2在方位方向上扫描;
40.方位角传感器33,为导塑电位器,其旋转轴与方位传动齿轮32的旋转轴相连,用于实时获取方位传动齿轮32的方位旋转角度,并将该方位旋转角度作为方位反馈传输给雷达基座4;
41.方位支架34,作为结构支撑,用于安装包括方位电机31、方位传动齿轮32、方位角传感器33和方位同轴旋转关节35;
42.方位旋转关节35,其旋转部分和方位电机31、方位传动齿轮32、方位角传感器33均安装在方位支架34上,并与俯仰传动机构2通过射频电缆进行电气连接;方位同轴旋转关节35的非旋转部分安装在雷达基座4上,并与该雷达基座4通过射频电缆进行电气连接,当方位支架34带动俯仰传动机构2和天线1在方位方向转动时,使得方位同轴旋转关节35的旋转部分与俯仰传动机构2之间的射频电缆和方位同轴旋转关节35的非旋转部分与雷达基座4之间的射频电缆均不受扭力作用,而避免射频电缆发生形变,提高了雷达的可靠性。
43.参照图4,所述雷达基座4,采用腔体结构,其内设有接口板41、信号处理板42、双轴伺服驱动器43和x波段集成收发组件44,其中:
44.接口板41,以fpga为处理核心,用于三方面的信息,并进行传输:一是接收x波段集成收发组件44传输来的参考时钟和自检结果,并以该参考时钟为基准产生控制信号传输给x波段集成收发组件44;二是接收外部输入,产生工作模式指令并传输给信号处理板42和双轴伺服驱动器43;三是接收信号处理板42传输来的处理结果并输出;
45.信号处理板42,以xilinx zynq系列soc为处理核心,用于采集x波段集成收发组件44传输来的中频信号,根据接口板41传输来的工作模式指令依次进行采样量化、数字下变频、脉冲压缩、脉冲积累、目标检测和数据组包处理,产生处理结果并传输给接口板41;
46.双轴伺服驱动器43,以dsp为处理核心,用于接收三种不同的信息进行传输驱动:第一种是接收俯仰传动机构2传输来的俯仰反馈并转发给信号处理板42;第二种是接收方位传动机构3传输来的方位反馈并转发给信号处理板42;第三种是接收接口板41传输来的工作模式指令,根据该工作模式指令产生俯仰驱动和方位驱动,并将该俯仰驱动传输给俯仰传动机构2,将该方位驱动传输给俯仰传动机构2。
47.x波段集成收发组件44,用于接收接口板41传输来的控制信号,产生大功率射频发射信号传输给方位传动机构3,产生参考频率信号和自检结果传输给接口板41,将方位传动机构3传输来的射频回波信号下变频为中频信号后再传输给信号处理板42;
48.参照图5,所述x波段集成收发组件44,包括接口控制模块441、频率综合模块442、功率放大模块443、环形器444、接收前端模块445和中频放大模块446,其中:
49.接口控制模块441,用于接收接口板41传输来的控制信号,以产生参考时钟和组件内部控制信号,并将该参考时钟回传给接口板41,将该组件内部控制信号分别传输给频率综合模块442、功率放大模块443、接收前端模块445和中频放大模块446;该接口控制模块441同时接收频率综合模块442传输来的工作状态数据,以产生自检结果再传输给接口板41;
50.频率综合模块442,由两片同型号的dds芯片和一片fpga芯片组成,用于接收接口控制模块441传输来的组件内部控制信号,以产生低功率射频信号传输给功率放大模块443,以产生本振信号传输给接收前端模块445,并将工作状态数据传输给接口控制模块441;
51.功率放大模块443,用于接收接口控制模块441传输来的组件内部控制信号,将频率综合模块442传输来的低功率射频信号放大后形成大功率射频发射信号,并通过环形器444传输给方位传动机构3;
52.环形器444,用于隔离射频发射信号和射频回波信号;
53.接收前端模块445,用于接收接口控制模块441传输来的组件内部控制信号,将方位传动机构3通过环形器444传输来的射频回波信号与频率综合模块442传输来的本振信号进行混频滤波的下变频操作后,变成中频回波信号传输给中频放大模块446;
54.中频放大模块446,用于接收接口控制模块441传输来的组件内部控制信号,并将接收前端模块445传输来的中频回波信号放大后传输给信号处理板42。
55.参照图6,所述信号处理板42,包括采样量化模块421、数字下变频模块422、脉冲压缩模块423、脉冲积累模块424、目标检测模块425和数据组包模块426,其中:
56.采样量化模块421,用于接收x波段集成收发组件44传输来的中频信号,并对该中频信号进行采样和量化处理,产生数字中频信号传输给数字下变频模块422;
57.数字下变频模块422,用于接收采样量化模块421传输来的数字中频信号,并对该数字中频信号进行数字下变频处理,产生数字基带信号传输给脉冲压缩模块423;
58.脉冲压缩模块423,用于接收数字下变频模块422传输来的数字基带信号,按照信号特征完成数字基带信号脉冲压缩处理,产生数字脉压信号传输给脉冲积累模块424;
59.脉冲积累模块424,用于接收脉冲压缩模块423传输来的数字脉压信号,并经过多周期实时存储、求和、求平均完成数字脉压信号的脉冲积累处理,产生数字脉压积累信号传输给目标检测模块425;
60.目标检测模块425,用于接收脉冲积累模块424传输来的数字脉压积累信号和接口板41传输来的工作模式指令,进行目标检测,产生视频编码告警数据传输给数据组包模块426;
61.数据组包模块426,用于接收目标检测模块425传输来的工作模式指令、俯仰传动机构2传输来的俯仰反馈和方位传动机构3传输来的方位反馈,对其进行数据组包,产生处理结果并传输给接口板41。
62.以上描述仅是本发明的一个具体实例,显然对于本领域的专业人员来说,在了解了本发明内容和原理后,都可能在不背离本发明原理、结构的情况下,进行形式和细节上的各种修正和改变,但是这些是基于本发明思想的修正和改变仍在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1