一种基于视觉的电缆保护套伸长率测量装置及使用方法
1.本发明涉及电缆保护套测量技术领域,具体为基于视觉的电缆保护套伸长率测量装置以及使用方法。
背景技术:
2.目前,传统的电缆材料拉伸长度使用方法有两种,一是将标记线与标尺的零刻度线重合,尽量保证测得的距离是临界瞬间标记线的距离,二是采用接触式拉力传感器的两个触头与标记线重合,当工件拉伸时,一个触头不动,另外一个触头跟随标记线移动,这种方法虽然能够保证测量距离比较准确,但是传感器的触头与待测工件接触会产生力的作用,很可能造成待测工件在标记线处断裂,造成实验失败,因两种传统的拉伸长度使用方法在实际的应用中并没有很高的实用价值。
3.随着机器视觉技术的发展,也有一些学者提出了基于机器视觉的测量方式,但由于实际的电缆护套的颜色多种多样,检测的试件颜色不确定,电缆护套拉伸断裂的长度也不确定,但却没有给出具体的解决措施。
技术实现要素:
4.本发明的目的在于提供了一种基于视觉的电缆保护套伸长率测量装置,以解决电缆保护套伸长率测量难以准确进行的问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于视觉的电缆保护套伸长率测量装置,包括拉力机,所述拉力机上设有一对工件安装卡槽,且一对工件安装卡槽间安装有哑铃件,下端所述工件安装卡槽处安装有拉力传感器,还包括工业相机,所述工业相机通过网口电信号连接主机,所述哑铃件上设有两条标记线,且工业相机用于拍摄两条标记线;所述拉力机电信号连接控制器。
6.本发明还提供如下使用方法,包括以下步骤:
7.a、首先使用控制器上的控制按钮让下侧的工件安装卡槽向下移动,将哑铃件放入两侧工件安装卡槽间并将哑铃件下侧卡紧,之后点击控制器的按钮让下侧的工件安装卡槽向上移动到合适位置,将哑铃件上侧卡紧;
8.b、哑铃件卡紧完毕之后,操作控制器让拉力传感器开始工作,拉力传感器向下开始带动下侧的工件安装卡槽开始移动,同时工业相机对哑铃件的拉伸过程进行图像采集,将采集的图像实时传递给主机进行图像处理,判断哑铃件是否断裂;
9.c、如果哑铃件尚未断裂,工业相机会一直进行数据采集,直到哑铃件断裂为止,哑铃件断裂的同时,拉力传感器检测到瞬间的拉力为,停止向下运动,主机控制工业相机停止采集,同时取前一帧作为临界帧来进行两条标记线之间长度的测量,进而计算哑铃件的断裂伸长率。
10.与现有技术相比,本发明的有益效果是:提出先检测试件具体的颜色,以及将获取的颜色分为黑色和白色两大类,将黑蓝红归于黑色类处理,黄绿白归于白色类处理,提取提
起精确感兴趣区域算法适用于拉伸长度不同的试件,解决了工业应用的实际问题。
11.本发明与其他的拉伸长度使用方法不同,通过对电缆材料的拉伸过程进行图像采集,当电缆材料在拉伸实验中断裂时,软件自动识别出工件断裂,停止采集数据。通过预先在电缆护套上标记直线,设计了一套自动识别断裂伸长率的系统,该系统也可根据工业相机的参数和工件卡槽的形状来实现多个试件在线检测,经过系统实验与传统实验比较分析,该系统在效率、精度、智能化方面都超过了传统的检测系统同时提出的解决方法也很好的解决了工程实际问题。
附图说明
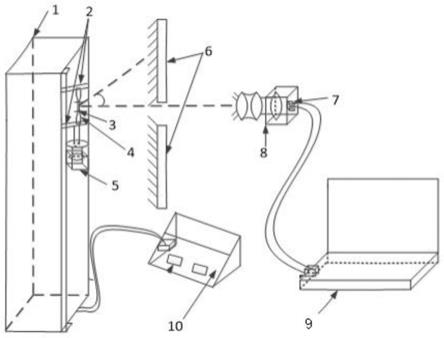
12.图1为本发明测量装置的结构示意图。
13.图2为本发明的哑铃试件结构示意图。
14.图3为本发明的小哑铃试件结构示意图。
15.图4为本发明的临界帧图。
16.图5为本发明的有效区域分割图。
17.图6为本发明的电缆护套断裂图。
18.图7为本发明的临界帧感兴趣区域图。
19.图8为本发明的颜色识别流程图。
20.图9为本发明的黑色类哑铃件二值化图。
21.图10为本发明的黑色类哑铃件腐蚀图像。
22.图11为本发明的黑色类哑铃二值化与腐蚀图像做差图。
23.图12为本发明的黑色类哑铃滤波图像。
24.图13为本发明的白色类哑铃抵抗光照图。
25.图14为本发明的白色类哑铃二值化图。
26.1、拉力机;2、工件安装卡槽;3、标记线;4、哑铃件;5、拉力传感器;6、led条形灯;7、网口;8、工业相机;9、主机;10、控制器。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.请参阅图1,本发明提供一种技术方案:一种基于视觉的电缆保护套伸长率测量装置,包括拉力机1,拉力机1上设有一对工件安装卡槽2,且一对工件安装卡槽2间安装有哑铃件4,下端工件安装卡槽2处安装有拉力传感器5,还包括工业相机8,工业相机8通过网口7电信号连接主机9,哑铃件4上设有两条标记线3,且工业相机8用于拍摄两条标记线3;拉力机1电信号连接控制器10。工业相机8和两条标记线3之间设有一对led条形灯6,确保在实验过程中提供稳定的光照条件。
29.本发明还提供一种测量装置的使用方法:包括以下步骤
30.a、首先使用控制器10上的控制按钮让下侧的工件安装卡槽2向下移动,将哑铃件4
放入两侧工件安装卡槽2间并将哑铃件4下侧卡紧,之后点击控制器10的按钮让下侧的工件安装卡槽2向上移动到合适位置,将哑铃件4上侧卡紧。
31.b、哑铃件4卡紧完毕之后,操作控制器10让拉力传感器5开始工作,拉力传感器5向下开始带动下侧的工件安装卡槽2开始移动,同时工业相机8对哑铃件4的拉伸过程进行图像采集,将采集的图像实时传递给主机9进行图像处理,判断哑铃件是否断裂。
32.c、如果哑铃件4尚未断裂,工业相机8会一直进行数据采集,直到哑铃件4断裂为止,哑铃件4断裂的同时,拉力传感器5检测到瞬间的拉力为0,停止向下运动,主机9控制工业相机8停止采集,同时取前一帧作为临界帧来进行两条标记线3之间长度的测量,进而计算哑铃件4的断裂伸长率。
33.其中,测试试验在23
±
5℃温度下进行。测试试验中拉力机的移动速度应为250
±
50mm/min;当绝缘材料为pe或pp时(pe为聚乙烯,pp为聚丙烯),拉力机的移动速度应为25
±
5mm/min。
34.在标记线3的划分过程中,需要待测的工件有哑铃试件和小哑铃试件,哑铃试件的标记线之间的长度为20mm,试件中部拉伸部分宽度为4mm,如下图2所示为其尺寸图;小哑铃试件的标记线之间的长度为10mm,试件中部的拉伸部分宽度和哑铃试件一样(如图三所示)。
35.在工业相机8的选择过程中,由于相机分辨率宽方向和高方向要保持适度,而且为了提高系统的稳定性,尽可能的让3到4个像素点对应一定的长度,并且要保证宽方向的分辨率满足要求,因此可选择使用1280
×
960的相机。随着半导体的发现,cmos传感器出现在了我们的身边,通过将其集成电路进行整合,形成cmos工业相机,工业相机作为机器视觉系统中的一个关键部分,分为ccd相机和cmos相机,目前ccd相机得到图片噪声少一些,质量相对好一点,相比cmos相机而言,ccd相机的价格更昂贵一些,但是随着技术的不断发展,cmos传感器成像的质量也并不逊色,而且帧速率也非常高,性价比非常好,随着cmos芯片功能的不断增强与完善,cmos芯片将成为未来工业相机领域的领头羊。综合多方面因素考虑,选择了cmos相机,且在确保合适的工作距离和视野的情况下,选择了型号为m0814
‑
mp2的镜头。
36.在实际的电缆护套拉伸实验中,由于各种材料的电缆护套层出不穷,电缆厚度有一点小小的差别,拉伸试验断裂时的长度就会有很大的区别,如何获取恰当的截取宽度这是非常重要的。
37.假设需要的合适宽度为h
[0038][0039]
其中p(i,j)为二值图中坐标为(i,j)的像素值
[0040][0041]
其中
p
(i,j)为二值图中坐标为(i,j)的像素值。假设横坐标为x时出现一整列为0,则需要的合适宽度h=x
‑
30(其目的是把多余的宽度去掉),如下图4所示,图片的右侧部分有卡槽,并且所有的拉力机两侧都有类似的卡紧待测工件的结构,图5所示为截取到合适宽度的感兴趣区域。
[0042]
在电缆保护套材料的拉伸实验中,通过将视频转换为一帧帧的图片,然后对图片进行依次处理,针对于每一帧图片,首先截取感兴趣区域,将感兴趣区域进行二值化处理,假设每一张图片截取的感兴趣区域分辨率为w*h。设定断裂宽度阈值width=z。
[0043][0044]
其中p(i,j)为二值图中坐标为(i,j)的像素值。则整列全是白色像素点的宽度为:
[0045][0046]
如果整列全为白色像素点的宽度w≥z,则判断当前帧图片为断裂帧,假设其帧数为n,则需要的临界帧图片为第n
‑
1帧。如下图6所示为第n帧,图7所示为第n
‑
1帧。
[0047]
由于各种哑铃件在颜色上有所差别,有红色、白色、黑色、黄色、绿色、蓝色等颜色的工件。当分割出感兴趣区域图片后,应识别出工件的颜色,对于不同颜色的工件进行分类处理,将蓝黑红归于一类进行处理,而白黄绿归于另外一类进行处理。由于待测工件每次都是固定在同一位置,在进行颜色识别时,首先截取矩形感兴趣区域,待测工件尺寸已知,选择恰当的矩形宽度即可,由于位置固定,可以保证截取的矩形框都充满了工件。
[0048]
假设截取的感兴趣区域分辨率为w*h,则其h,s,v数值是否满足颜色区域范围条件为:
[0049][0050]
其中l=(h,s,v),p(i,j)[k](i=0,1,2
…
,w;j=0,1,2
…
,h;k=1,2,3)分别表示某一个像素点的h,s,v通道的数值。定义需要识别工件的颜色:红色,黄色,蓝色,绿色,白色,黑色,将它们初始化,依次为red=0,yellow=0,blue=0,gre en=0,white=0,black=0。如表1所示为颜色的阈值区间。
[0051]
[0052]
表1
[0053]
如果p(i,j)[k](k=1,2,3)同时满足某一颜色的范围,每满足一次,相应颜色变量数值为当前数值加1,累加之后,通过max{red,yellow,blue,green,white,black}得到最大值,将最大值与各颜色变量依次对比得到待测工件的实际颜色。其流程如图8所示。
[0054]
黑色类工件分析:
[0055]
在进行电缆护套拉伸实验中,对于蓝黑红三种颜色待测工件来说,通过最大类间方差进行二值化之后,待测的工件都呈现黑色,因而可以将这三种颜色归于一类进行处理。通过在蓝黑红的待测工件上标记白色直线,将图片灰度化,二值化处理之后,得到的图形中间就会呈现断裂的情况,然后对此图像进行左右腐蚀,待测工件的断裂的区域和左右两边的工件连在一起,通过将左右腐蚀的图片和未腐蚀的二值图像进行做差,得到的就会是标记的直线。假设二值化图片为x
k
,左右腐蚀的图片为x
k+1
,则差分图像为:
[0056]
δx
k
=x
k+1
‑
x
k
ꢀꢀ
(6)
[0057]
如下图11所示为差分图像,将差分后的图片进行滤波,得到的就只有清楚的白色轮廓,如下图12所示,通过提取该图片的轮廓,然后求出两个轮廓之间的质心,即可得出标记线之间的距离。
[0058]
将差分后的图片进行滤波,得到的就只有清楚的白色轮廓,通过提取该图片的轮廓,然后求出两个轮廓之间的质心,即可得出标记线之间的距离。
[0059]
白色类工件分析:
[0060]
在白黄绿待测工件的拉伸实验中,将分割出的感兴趣区域进行灰度化得到灰度图a,假设其分辨率为k*g假设其平均灰度值为:
[0061][0062]
将灰度图a分成大小为p*q的子块,假设这样的子块有n个,将每个子块图设为i
k
(k=1,2
…
,n)则每个子块的,平均灰度值为:
[0063][0064]
将子块灰度平均值与灰度图a的均值做差,其差值为:
[0065][0066]
其中k=1,2
…
,n,将δ
k
(k=1,2
…
,n)组合成差值矩阵e,使用插值法将矩阵e的分辨率变为分辨率大小为k*g的图b,则光照补偿后的图c,其像素值为:
[0067]
c(i,j)=a(i,j)
‑
b(i,j)
ꢀꢀ
(10)
[0068]
其中c(i,j),a(i,j),b(i,j)分别为图c中坐标为(i,j)的像素值,图a中坐标为(i,j)的像素值,图b中坐标为(i,j)的像素值。将光照补偿后的图片进行二值化,可以清楚的看到标记线轮廓非常的清楚,如下图13、14所示分别为绿色工件的抵抗光照图和二值化图。
[0069]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1